 Apollo軌跡規劃技術分享Gitchat,一步幫你把車駛入正軌
Apollo軌跡規劃技術分享Gitchat,一步幫你把車駛入正軌
聽說你的無人車還不在狀態?紅黃綠交通燈識別不當,障礙物繞了又繞,這里有個機會助力你的車車步入“正軌”!
Apollo軌跡規劃技術分享Gitchat,此次分享由百度高級架構師,百度Apollo平臺規劃方向技術負責人—Zhang Yajia講解。
軌跡規劃是無人駕駛系統的核心模塊之一。軌跡規劃的核心就是要解決車輛該怎么走的問題。軌跡規劃的輸入包括拓撲地圖,障礙物及障礙物的預測軌跡,交通信號燈的狀態,還有定位導航(因為要知道目的地是哪才能規劃路徑)、車輛狀態等其他信息。而軌跡規劃的輸出就是一個軌跡,軌跡是一個時間到位置的函數,就是在特定的時刻車輛在特定的位置上。軌跡規劃算法的優劣直接決定了無人駕駛車的安全性和舒適性,在無人駕駛系統中發揮著至關重要的作用。
軌跡規劃本質上來說是一個優化問題。談到優化問題,我們需要知道優化的約束和優化的目標。首先看約束,第一個約束就是車輛要遵守交規,這是強制性的約束;第二個約束是要避免碰撞;第三個約束是要使規劃的軌跡在控制上可實現,不能出現規劃了一個急彎的軌跡,車根本拐不過來的狀況。而優化的目標總的來說就是要跟人開的像,具體表現就是讓人乘坐起來感到舒適,但像人也有不同的優化目標。
在百度 Apollo 無人駕駛開源平臺中,軌跡規劃分為路徑規劃和速率規劃兩個順序過程。路徑規劃結合道路邊界線、靜態障礙物的信息,產生軌跡的幾何信息。速率規劃在給定的路徑下,考慮動態障礙物的預測軌跡、道路限速信息和決策信息,產生安全舒適的速率分配。
除了你,已有800+開發者Get新技能。本次分享會除了高質量干貨分享,還包括與百度高級架構師,百度Apollo平臺規劃方向技術負責人——Zhang Yajia的問答互動,約等于一對一的授課,馬上翻開小本本開始做課前準備。
我們目前從Zhang Yajia的Gitchat中瞄到了兩段:軌跡規劃的綜述以及無人駕駛的位形與狀態,先與你一起分享。
以下,ENJOY
軌跡規劃的目標是計算出安全、舒適的軌跡供無人駕駛車輛完成預定的行駛任務。安全意味著車輛在行駛過程中與障礙物保持適當的距離,避免碰撞;舒適意味著給乘客提供舒適的乘坐體驗,比如避免過急的加減速度,在彎道時適當減速避免過大的向心加速度等等;最后,完成行駛任務指規劃出的軌跡要完成給定的行駛任務,不能因為過于保守的駕駛導致不可接受的行駛時間。
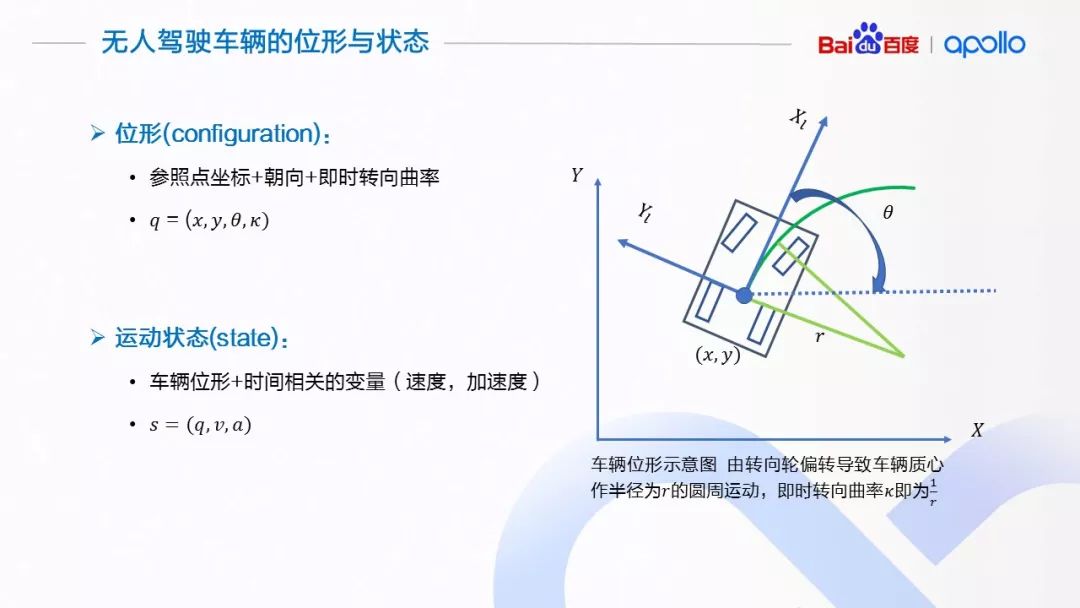
我們這里對軌跡規劃問題作正式的定義。首先,我們介紹兩個機器人領域的概念:位形(Configuration)是在所研究的規劃問題中,能夠唯一性的表達機器人狀態的最小一組變量。變量的數量稱為位形的維度。這里需要注意的是,位形空間的維度,即使對于同一個機器人來講,所研究的問題不同,維度也是不同的。比如,對一個人形機器人來講,如果規劃問題是在三維空間中移動,位形需要由參照點的變換矩陣,關節的伸展角度組成;如果規劃問題是作物體的操作(Manipulation Planning),則在前面問題位形空間的基礎上,還要增加機器人手指關節的伸展角度等。
-
自動駕駛
+關注
關注
784文章
13794瀏覽量
166413 -
Apollo
+關注
關注
5文章
342瀏覽量
18446
原文標題:大咖面對面 | 一步幫你把車駛入正軌
文章出處:【微信號:Apollo_Developers,微信公眾號:Apollo開發者社區】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
沙子變芯片,一步步帶你走進高科技的微觀世界
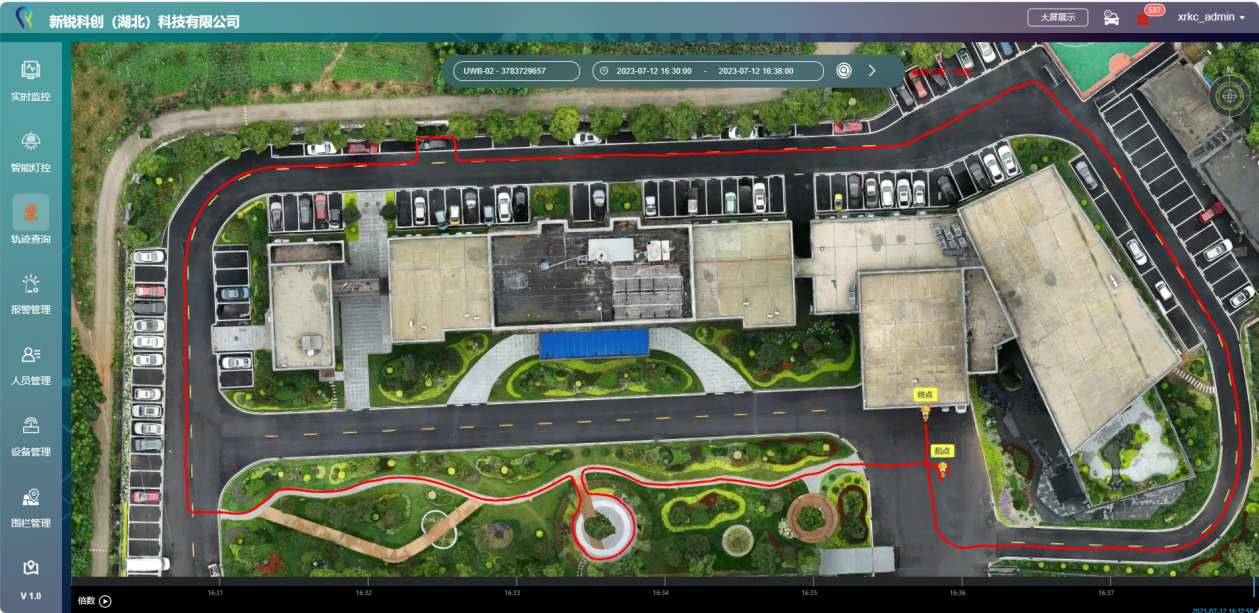
園區封閉化管理之人員和車輛定位及軌跡追蹤
人員軌跡分析算法有哪些?


用XDS200仿真PGA900時候,單步執行程序PC支持并沒有按照C語言一步一步執行,為什么?
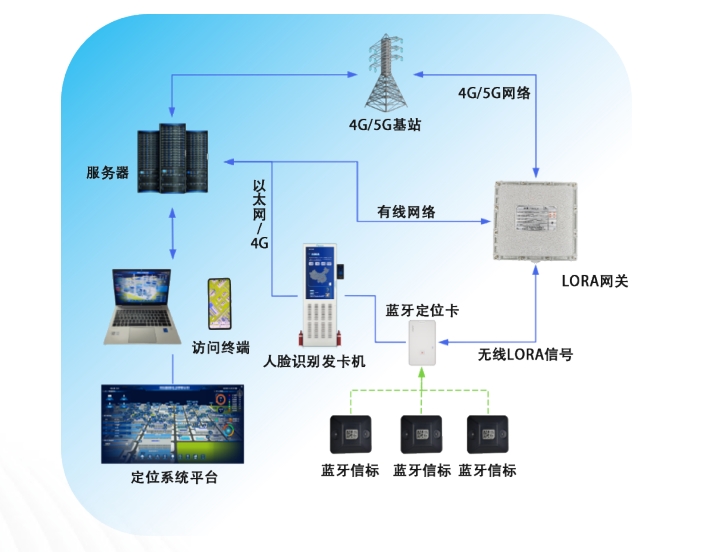
人員定位及軌跡管理技術原理及應用領域
昂科芯片燒錄高質量出海 唱響越南一步步新技術研討會
芯馳科技與IAR宣布進一步擴大合作
百度Apollo計劃年內部署千臺無人車
卓馭科技與高通合作宣布進一步推動汽車行業智能駕駛技術的發展

Prevayl的下一步是什么

大族封測IPO進程再進一步
傳感器技術的下一步





 工商網監
工商網監
評論