 神奇的粒子機器人
神奇的粒子機器人
沒想到吧,像細胞一樣自由組合靈活多變的機器人正在從科幻電影中走出來。就像在傷口愈合是活細胞聚集并集體遷移的過程。在生物系統中,群體的大規模集體遷移是通過組件的耦合和協調來實現的,在傷口愈合的過程中,活細胞聚集并集體遷移。
受到生物機制的啟發,來自麻省理工學院、哥倫比亞大學等機構的研究人員開發了一種粒子機器人,這種粒子機器人可以成群結隊地移動、運送物體和完成其他任務,并且可以根據外界環境自主的改變集群的形狀,具有超強的靈活性和健壯性。
2019年3月20日,國際權威學術期刊《自然》雜志以封面論文的形式報道了這項研究成果,來自中國的李曙光作為該論文署名第一作者。
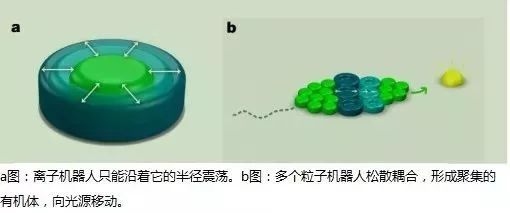
粒子是如何動起來的呢,不妨讓我們來看看這個客觀的實驗過程,研究人員制作成功了一種只能沿半徑方向擴張和收縮的粒子機器人(如a圖),當多個例子機器人組成集群(松散耦合)時,能夠自主地向光源移動(如b圖)。
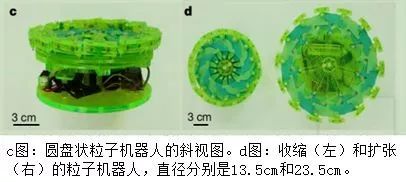
這種粒子機器人是由圓盤狀單元組成(如c圖),圓盤狀單元收縮時直徑約為15.5cm,擴張時直徑約為23.5cm(見d圖)。
粒子集群在沒有外部光源刺激的情況下,只能隨機移動;當有外部光源刺激時,集群可以朝光源移動。如果在集群和光源之間設置一個有縫隙的障礙物,集群也可以擠過這個縫隙,繼續向光源運動。在運動過程中,集群還可以搬運微小物體。
值得注意的是,這些粒子機器人之間的通信是廣播式的,即不是通過一個個的“口耳相傳”,因此可以增加或刪減機器人,而不影響集群的整體運動。
為了證明集群的穩健性,研究人員用虛擬仿真技術模擬了多達10萬個粒子機器人的集群,發現哪怕多達20%的粒子機器人出現故障,集群仍能繼續工作。
粒子機器人由圓柱形基座、電池、小型電機、傳感器、微控制器、通信組件以及安裝在頂部的霍伯曼飛行環(一種常見的兒童玩具)組成。
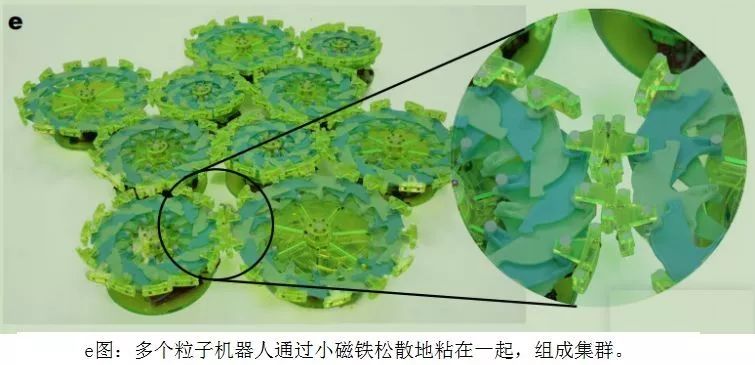
霍伯曼飛行環上有許多小面板,每個小面板上都安裝有兩個小磁鐵。這些小面板連接成一個圓形,可以展開和收縮。當多個粒子機器人通過小磁鐵松散地粘在一起時,就組成了一個粒子機器人集群(見e圖)。
為了使集群協調地運動,其中的訣竅是給粒子機器人編程,讓它們按照精確的順序擴張和收縮,從而推動整個集群向光源移動。為了做到這一點,他們開發了一種算法,該算法可以使粒子機器人的傳感器接收到其粒子機器人廣播的光強信息。
粒子機器人的傳感器用于檢測外界光源發出的光強大小。假設光強等級分為1到10級,離光源最近的粒子機器人的接受到的是10級,最遠的接收到的是1級。光強等級決定粒子機器人擴張或收縮的特定順序:接收到10級型的光強粒子機器人首先擴張、收縮,緊接著接收到等級為9級光強的機器人擴張、收縮,以此類推。
粒子機器人的未來
粒子機器人的關鍵和新奇之處在于:“它不用集中控制,沒有固定的形狀,而且它的部件也沒有獨特的標識,每個粒子機器人都是各自獨立的,沒有任何個性化的身份信息。” 研究人員說:“下一目標是將粒子機器人微型化,并且制造出由數百萬個微型機器人組成的集群。”
這種微型機器人最具有前景的應用領域是生物醫學,因為微型機器人集群可能會受化學梯度、氧梯度或癌組織環境pH值變化的影響而作定向運動,因此可以實現靶向藥物遞送的功能,這對于未來的癌癥治療和藥物研發方面具有非常大的價值。此外,還具有診斷、探測、修復等應用潛力。
-
微控制器
+關注
關注
48文章
7572瀏覽量
151650 -
傳感器
+關注
關注
2552文章
51239瀏覽量
754805 -
機器人
+關注
關注
211文章
28524瀏覽量
207558
原文標題:NATURE 人工智能 | 神奇的粒子機器人
文章出處:【微信號:aicapital,微信公眾號:全球人工智能】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
【「具身智能機器人系統」閱讀體驗】+初品的體驗
《具身智能機器人系統》第1-6章閱讀心得之具身智能機器人系統背景知識與基礎模塊
醫療機器人有哪些_醫療機器人有哪些應用
開源項目!用ESP32做一個可愛的無用機器人
開源項目!用ESP32做一個可愛的無用機器人
柔性機器人與剛性機器人區別與聯系

Al大模型機器人
基于FPGA EtherCAT的六自由度機器人視覺伺服控制設計
其利天下技術·搭載無刷電機的掃地機器人的前景如何?
「喜報」邁步機器人榮獲機器人應用典型案例獎






 工商網監
工商網監
評論