") 關(guān)于ADAS八大系統(tǒng)說明分析
關(guān)于ADAS八大系統(tǒng)說明分析
最簡(jiǎn)單的方式告訴你“ 高級(jí)駕駛輔助系統(tǒng)”的功能,閑言少敘,進(jìn)入正題。
盲點(diǎn)偵測(cè)系統(tǒng)
汽車駕駛?cè)说拿c(diǎn)是指三面后視鏡,左、右、內(nèi)看不到的區(qū)域,相信很多駕駛?cè)硕紝?duì)于盲點(diǎn)有深刻的印象,它也是在眾多事故中,常發(fā)生的意外之一。而盲點(diǎn)偵測(cè)系統(tǒng)就是運(yùn)用雷達(dá)和傳感器,來偵測(cè)車輛后方的盲點(diǎn)區(qū),在盲點(diǎn)區(qū)偵測(cè)到車輛靠近時(shí)會(huì)向駕駛員提供警示,幫助駕駛?cè)藢⒁馔獾臋C(jī)率降至最低。
停車輔助系統(tǒng)
ADAS 的停車系統(tǒng)就造福許多不會(huì)停車的新手們。停車輔助系統(tǒng)又分為 2 種,分別是主動(dòng)式與被動(dòng)式,前者系統(tǒng)自動(dòng)控制方向盤以幫助駕駛完成停車,當(dāng)然油門、剎車與檔位切換還是要車主自行操控。后者則是以影像(攝影機(jī))與影音(超音波)為感測(cè)單元所組成的,提供更多車身周圍信息給車主掌握,減少碰撞機(jī)會(huì)。
車道偏離警示系統(tǒng)
這套系統(tǒng)由 攝影機(jī)、傳感器及控制器所組成,原理是運(yùn)用在車身側(cè)面或后視鏡的攝影機(jī),采樣目前行駛車道的標(biāo)識(shí)線,再通過圖像處理取得當(dāng)前汽車在車道的位子,這時(shí)只要汽車偏離車道,控制器就會(huì)發(fā)出警報(bào)信號(hào),從感測(cè)到發(fā)出警報(bào),過程只需約 0.5 秒的時(shí)間,以實(shí)時(shí)提醒、叫醒駕駛,避免意外的發(fā)生。
碰撞預(yù)防系統(tǒng)
由安裝在車頭的雷達(dá),偵測(cè)自車和前方車輛的距離及速度,初期會(huì)發(fā)出警告聲來提醒駕駛?cè)俗⒁廛嚲啵糗嚲嘁廊怀掷m(xù)拉近,車輛便會(huì)先自動(dòng)輕踩剎車,并輕拉安全帶 2-3 次,警告駕駛?cè)耍粝到y(tǒng)判定追撞是沒辦法避免時(shí),啟動(dòng)自動(dòng)緊急剎車后,會(huì)同時(shí)立刻拉緊安全帶固定駕駛?cè)耍档鸵馔獍l(fā)生后的傷害。
適路性車燈系統(tǒng)
這套系統(tǒng)可依照不同的路況、環(huán)境、車速及天氣狀況,自動(dòng)調(diào)整車燈的照明范圍及角度,讓車燈照射范圍可以更深遠(yuǎn)下,又不會(huì)影像到其他用路人的視線,以提供駕駛?cè)伺c對(duì)向來車更安全及舒適的照明,從過去的AFS主動(dòng)轉(zhuǎn)向式頭燈,到現(xiàn)在結(jié)合傳感器的多顆LED智能型頭燈,都是屬于此系統(tǒng)的范疇。
夜視系統(tǒng)
可幫助駕駛可以在視線不明、看不清楚的夜晚或惡劣天氣時(shí),自動(dòng)識(shí)別動(dòng)物或大型異物,同時(shí)警告駕駛前方路況,以避免意外的發(fā)生。辨別方式為以紅外線來感知熱量的不同,區(qū)分人、動(dòng)物、車輛以及環(huán)境的差異,經(jīng)過處理轉(zhuǎn)變成圖像,將原本看不清楚的物體清楚呈現(xiàn)在駕駛眼前,以降低行車風(fēng)險(xiǎn)。
主動(dòng)車距控制巡航系統(tǒng)
這是通過安裝在車輛前部的車距傳感器,持續(xù)掃描車輛前方道路來得知前車的車速與相對(duì)距離,行駛中會(huì)自動(dòng)偵測(cè)車速,當(dāng)與前車的距離越來越小時(shí),會(huì)對(duì)應(yīng)調(diào)整自身車速,與前方車輛保持安全距離,減少碰撞意外的發(fā)生,也就是所謂的高級(jí)版自動(dòng)巡航系統(tǒng),目前許多車款上都已可看見此系統(tǒng)的蹤影。
駕駛?cè)松頎顟B(tài)監(jiān)視
目前系統(tǒng)大多都是利用攝影機(jī)偵測(cè)駕駛者臉部,判斷專注力程度、是否有打瞌睡的象征,還有系統(tǒng)更是利用駕駛?cè)搜劬﹂_閉頻率情況,來辨別安全等級(jí),提供適合的警告或是協(xié)助動(dòng)作,如果駕駛者的臉部表情變化減少,甚至出現(xiàn)閉眼的情況,車輛就會(huì)透過聲響與燈號(hào)來警示車主注意,以減少意外事故發(fā)生。
上面提到的每個(gè)系統(tǒng)主要包含3個(gè)程序,首先是信息搜集:不同的系統(tǒng)需藉由不同類型的車用傳感器,包含毫米波雷達(dá)、超聲波雷達(dá)、紅外雷達(dá)、激光雷達(dá)、CCD CMOS影像傳感器及輪速傳感器等,來收集整車的工作狀態(tài)及其參數(shù)變化情形,并將不斷變化的機(jī)械運(yùn)動(dòng)變成電子參數(shù)(電壓、電阻及電流)。舉例來說,車道偏離警告系統(tǒng)使用CMOS影像傳感器、夜視系統(tǒng)則使用紅外線傳感器、適應(yīng)性定速控制通常使用雷達(dá)、停車輔助系統(tǒng)則會(huì)使用超聲波等。
ADAS系統(tǒng)需先透過不同類型的車用傳感器,包含毫米波雷達(dá)、超聲波雷達(dá)、紅外雷達(dá)、激光雷達(dá)、CCD CMOS影像傳感器及輪速傳感器等協(xié)助,就可讓汽車掌握外界車況,才能進(jìn)行后續(xù)的警示或反應(yīng)動(dòng)作。
其次是信息分析與指令下達(dá):電子控制單元(ECU)會(huì)在針對(duì)傳感器所收集到的信息進(jìn)行分析處理,然后再向控制的執(zhí)行裝置下達(dá)作棟指令。最后則是執(zhí)行動(dòng)作:包含油門、剎車、燈光、聲響等系統(tǒng)都是屬于執(zhí)行器的范疇內(nèi),會(huì)依據(jù)ECU輸出的訊號(hào),來執(zhí)行各種反應(yīng)動(dòng)作,讓汽車安全行駛于道路上。
目前ADAS系統(tǒng)的主要功能目前并非是完全控制汽車,而是為駕駛?cè)颂峁┸囕v的工作情形,與車外環(huán)境變化等相關(guān)信息進(jìn)行分析,且預(yù)先警告可能發(fā)生的危險(xiǎn)狀況,讓駕駛?cè)颂嵩绮扇∫驊?yīng)措施,避免交通意外發(fā)生。至于成為無(wú)人駕駛智慧車技術(shù)基礎(chǔ)的目的,當(dāng)然也是ADAS系統(tǒng)目前積極追求的方向,不過這需在不斷累積使用經(jīng)驗(yàn)與盲點(diǎn)克服后,同時(shí)加入更多主動(dòng)偵測(cè)系統(tǒng),甚至是物聯(lián)網(wǎng)功能后,才有機(jī)會(huì)進(jìn)一步實(shí)現(xiàn)的目的,畢竟自動(dòng)駕駛所需具備的汽車技術(shù)層面更高、更復(fù)雜。
結(jié)語(yǔ)
多年前如果告聽到:汽車會(huì)自動(dòng)判斷障礙物,同時(shí)閃避危險(xiǎn),你可能以為這是電影里才有的情節(jié),不過現(xiàn)今通過車載攝影機(jī)與雷達(dá)感測(cè)裝置,已讓汽車“看”得見周遭路況,再搭配運(yùn)算快速的ECU影像辨識(shí)與分析系統(tǒng)后,就可讓汽車進(jìn)一步預(yù)估可能遭遇的狀況,并主動(dòng)提出警示,甚至直接介入煞車與方向盤系統(tǒng),讓車輛自動(dòng)執(zhí)行避險(xiǎn)動(dòng)作,這些并不是空談,都已是許多市售車上具備的安全配備,也讓人感嘆科技的進(jìn)步的速度。
ADAS系統(tǒng)能有如此高智能的反應(yīng),除了傳感器的發(fā)展日益齊全外,處理器的反應(yīng)速度增長(zhǎng)與分析數(shù)據(jù)庫(kù)的不斷建立也是功臣,否則大量收集到的信息無(wú)法有效分析與反應(yīng),還是無(wú)法達(dá)到閃避危險(xiǎn)的目的。
-
傳感器
+關(guān)注
關(guān)注
2552文章
51239瀏覽量
754818 -
雷達(dá)
+關(guān)注
關(guān)注
50文章
2951瀏覽量
117699 -
ADAS系統(tǒng)
+關(guān)注
關(guān)注
4文章
226瀏覽量
25729
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
ADAS的八大系統(tǒng)
汽車電氣化的八大難點(diǎn)介紹

八大系統(tǒng)電源設(shè)計(jì)問題及解析
高新技術(shù)企業(yè)八大領(lǐng)域分析
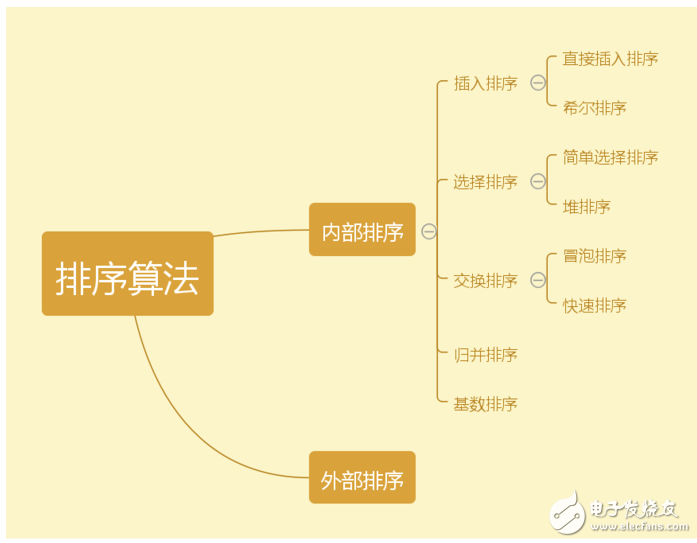
數(shù)據(jù)結(jié)構(gòu)常見的八大排序算法
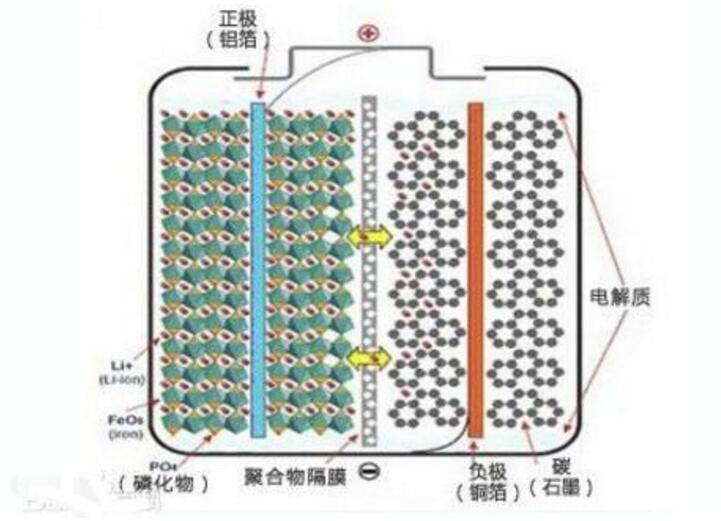
磷酸鐵鋰電池八大缺陷及八大優(yōu)勢(shì)分析
詳細(xì)putty串口使用教程與八大使用技巧分享








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論