 關于步進電機的內部結構的介紹
關于步進電機的內部結構的介紹
許多步進電機與齒輪結構或機制結合使用,從而將旋轉運動變換成線性運動,如打印機中所需要的移動打印頭或紙。原則上,由于步進電機的角度由激勵線圈確定,所以轉子的位置總是已知的,因此該系統可以“開環”操作而不需要反饋傳感器。實際情況是,存在傳動系統或負載的超載情況,還有其它一些問題可能會導致轉子在受到驅動時超出原有步伐,所以很多步進應用使用傳感器和閉環模式來報告實際轉子的位置。也可以使用一個“復位”模式,移動步進電機的負載,如一個打印頭,回到已知歸屬位置,然后復位步進電機的零位。
步進電機中有兩個電氣配置被廣泛應用于線圈(極)的繞線模式;并且每個都有相關聯的驅動拓撲結構。最常用的方法被稱為雙相設計,即使用兩種類型的繞組:單極(也稱為單線)和雙極(雙線),(圖4)。這兩種方法提供了驅動需求、電機尺寸、重量等因素的權衡。
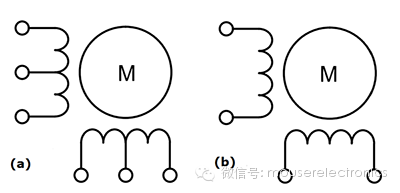
圖4:步進馬達的磁極可以纏繞為:(a)一個中心抽頭的單極繞組,通過關閉一個繞組而另一個打開可以逆轉該磁場;或(b)雙極繞組,這需要反轉電流流向來逆轉該磁場。 (來源:安森美半導體)。
在單極步進電機中,每相存在一個單一的中心抽頭繞組,通過繞組的一部分接通來改變磁場的方向。磁極在逆轉時可以不用改變電流流向,所以,每個繞組的通信電路可以非常簡單,僅需使用單個低成本晶體管即可(圖5)。一個典型的雙相電機每相3根引線,共計6根引線;這兩相的公共端通常相連,所以,電機僅有5根引線。
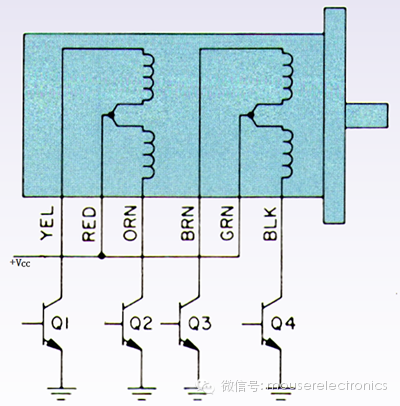
圖5:單極繞組配置具有簡單的驅動結構,為每個繞組使用一個晶體管開關。晶體管不需要“浮動”,但可以使用一個單端供電并共享共地線。 (整流二極管并未顯示。來源:AIRPAX步進電機手冊,1989)
與此相反,雙極馬達每相使用單個繞組,因此翻轉磁極時必須改變繞組中電流流向。其結果是,驅動電路比較復雜,并且通常通過H橋來實現。常見的每相有兩根引線并且無共線,對于多相電機總共需要6至8根引線,實際數量取決于具體配置。
在單極配置下,因為在任何時刻只有一半的繞組在使用,其銅的成本和功率重量比和功率大小比都差于雙極繞組。另一方面,雙極設置中電驅動配套比較復雜。然而,現代步進驅動器IC很輕松的取代了驅動拓撲結構,使繞組的這方面考慮和步進電機選擇幾乎不再成為一個問題。
步進電機屬性
相比于其它電機設計,步進電機具有一些獨特的特性。其相對優勢包括:
?它們可以提供精確定位和重復性運動,一個精心設計的步進電機將具有介于3%和5%的步進位置精度;同樣重要的是,該誤差不會從當前步累積到下一步。
?它們可以在低轉速甚至零轉速下提供足夠的扭矩,并且非常適合于快速啟動/停止/反向等情況。
?它們有可靠的機械,因為沒有換向器和電刷磨損;軸承是唯一會受到磨損的部分。
?它們在許多應用中可以用于開環電機,節省了反饋傳感器的成本。
?不需要高分辨率的應用可以使用具備較少極數的低成本版本。
然而,它們并非每種應用的最佳選擇。也包括一些缺點:
?它們不是非常適合于高轉速或連續運動,也不適合用于高功率電機(高于1/100至1/20馬力,或約10至50瓦)。
?在功率使用方面它們不如BLDC電機高效。
?由于電氣或機械問題它們可能失去同步或跳過某些步進,并可能需要一個反饋傳感器,以及停頓或者停止條件的電氣檢測。
?使用過程中,它們往往會顫抖和振動,表現為一種齒槽行為。 (有辦法來管理這一點,將會在下面討論)。
?在一定的步進速率時,步進電機會表現出機械共振,共振的大小是轉速(rpm)、傳動系統、動態負載的函數。共振導致扭矩下降或損失。
微步進:增強型步進技術
微步進有兩個好處。首先,電機操作變得更平滑,并且齒槽和共振的許多相關問題也可避免。其次,它能夠將轉子處于磁極之間的位置,從而增加了有效位置分辨率(雖然可用扭矩有所降低,通常介于10%和30%)。微步進是一個很容易理解的技術并且許多步進控制器可以實現其復雜的細節,依照管理功能的方向發展。因此,它是提高步進電機性能的零成本或低成本選擇。
前面的討論假定在高轉換率下電磁極被快速打開或關閉。一種改進的方法是使用半步進,其中磁極被半接通和半關閉,從而倍增了表觀步進數。更先進的方法是微步進,它使用一個斜坡或正弦形的開/關波形來開關電源(圖6)。其結果是,一些磁極在通電中而其它則被去電中,兩者之間存在交叉或重疊。
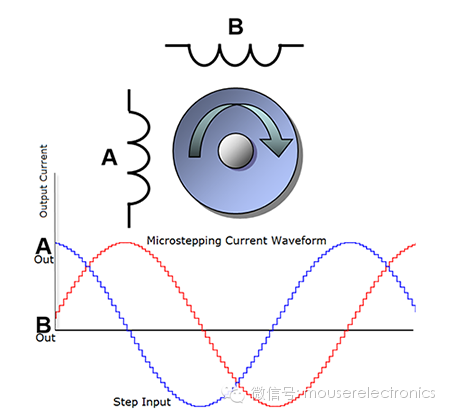
圖6:在微步進中,電流驅動是由一系列具有正弦狀的小步驟組成。其結果是轉子運動更加平滑了,也具備了指向磁極之間的能力,從而取得比僅級數允許下更大的有效角分辨率(來源:德州儀器)
-
步進電機
+關注
關注
150文章
3109瀏覽量
147444 -
拓撲結構
+關注
關注
6文章
323瀏覽量
39189 -
馬達
+關注
關注
1文章
820瀏覽量
62269
發布評論請先 登錄
相關推薦
步進電機的原理是什么?其內部結構是怎樣的
28BYJ-48是什么?其內部結構是怎樣的?

FPGA內部結構的詳細介紹
超聲波電機原理及內部結構
超聲波電機的原理以及內部結構的介紹
步進電機的內部結構資料下載

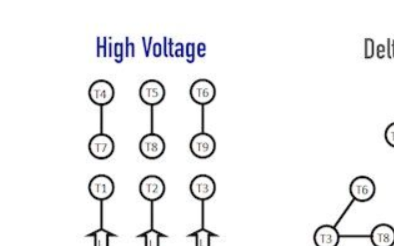
Delta繞線電機的內部結構介紹
步進電機的結構及基本工作原理






 工商網監
工商網監
評論