 S7-1200運動控制之PTO控制方式常問問題
S7-1200運動控制之PTO控制方式常問問題
1. 絕對定位和相對定位區別?
答:相對定位是指在軸當前位置的基礎上正方向或負方向移動一段距離;絕對定位指的是當軸建立了絕對坐標系后,軸的每個位置都有固定的坐標,無論軸的當前位置值是多少,當軸指令了絕對運行指令后相同的坐標值,軸最終都定位到同一個位置。
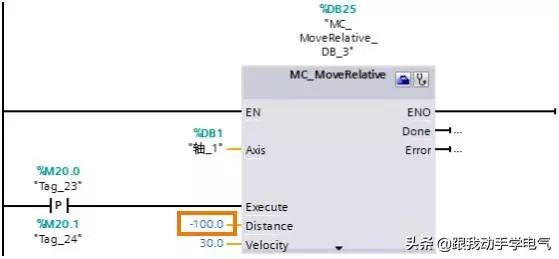
2. 如何設置MC_MoveRelative方向運行?
答:將MC_MoveRelative指令中的“Distance”設置成負值就可以讓軸向負方向運行了。如下圖所示。
3. 為什么有時用戶在監控程序的時候看不到指令的完成位Done的為1?
答:帶有Execute管腳的指令,例如MC_MoveRelative等指令的Done和Execute之間有下圖中描述的關系:
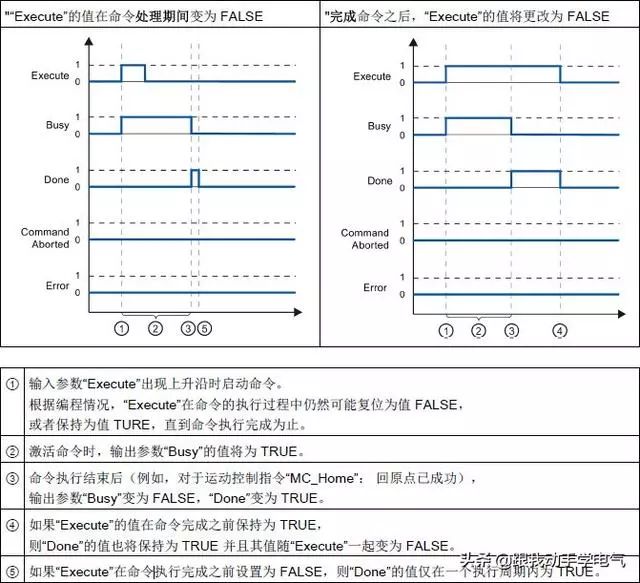
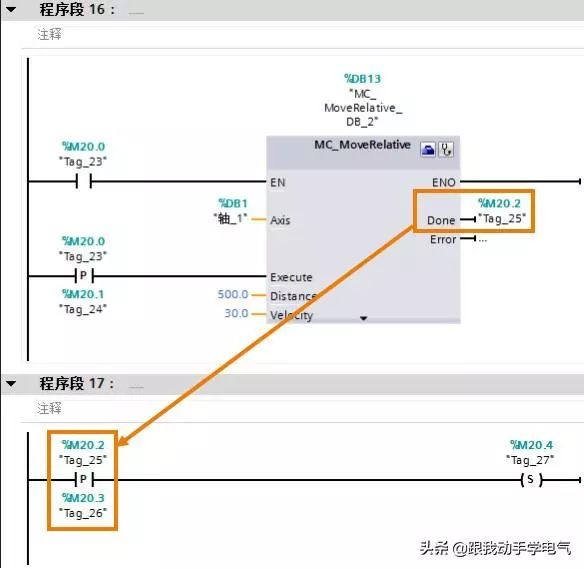
如上圖所示,如果"Execute"在命令執行完成之前設置為 FALSE,則"Done"的值僅在一個執行周期內為 TRUE。因此,如果用戶用|P|指令觸發帶有“Execute”管腳的指令,則該指令的“Done”只在一個掃描周期內為1,因此在監控程序時看不到Done位為1。用戶可以通過在程序中添加指令用Done置位一個位來判斷,如下圖所示,用MC_MoveRelative為例進行說明。
4. 回原點已完成信號什么時候會丟失?
答:最常見的就是S7-1200 CPU重新上電后,回原點已完成信號會丟失,用戶需要重新啟動MC_Home指令。
? 通過"MC_Power"運動控制指令禁用軸
? 在自動模式和手動控制之間切換,也就是用戶使用控制面板和程序切換時會丟失回原點已完成信號
? 在啟動主動回原點時。 在成功完成回原點操作之后,軸回原點將再次可用。
? CPU 重新啟動后(RUN-STOP -> STOP-RUN),包括CPU斷上電。
5. 什么時候需要執行回原點命令?
答:用戶需要使用MC_MoveAbsolute指令之前執行回原點指令。
6. 如果實際沒有原點開關和限位開關,可以使用絕對定位指令MC_MoveAbsolute嗎?
答:可以,用MC_Home指令的Mode=0和Mode=1方式,讓軸完成絕對坐標定位。然后就可以調用MC_MoveAbsolute指令進行絕對運動了。MC_Home指令的Mode 0 和Mode 1在MC_Home指令部分有詳細說明。
7. 用戶在實際執行回原點指令時,軸遇到原點開關沒有變化,直到運行到硬件限位開關停止報錯?
答:首先要測試原點開關是否起作用,也就是說當軸碰到原點開關時,原點開關的DI點的指示燈是否點亮。
可能的原因如下:
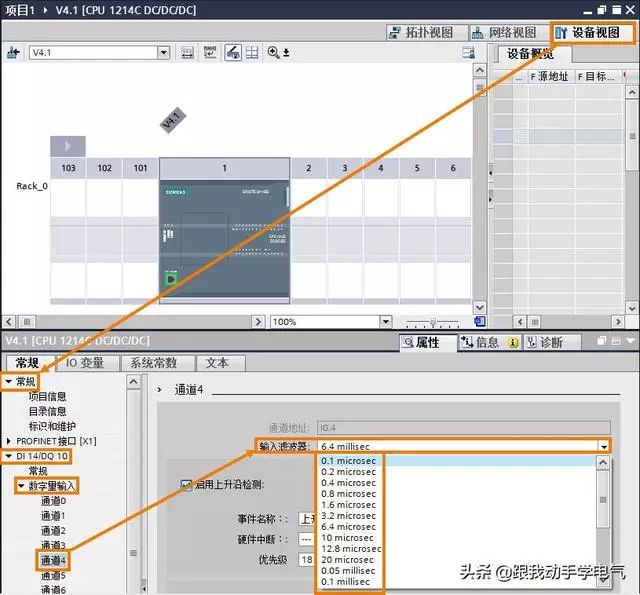
①尋找原點開關的速度過快,可以減小“逼近速度”和“參考速度”
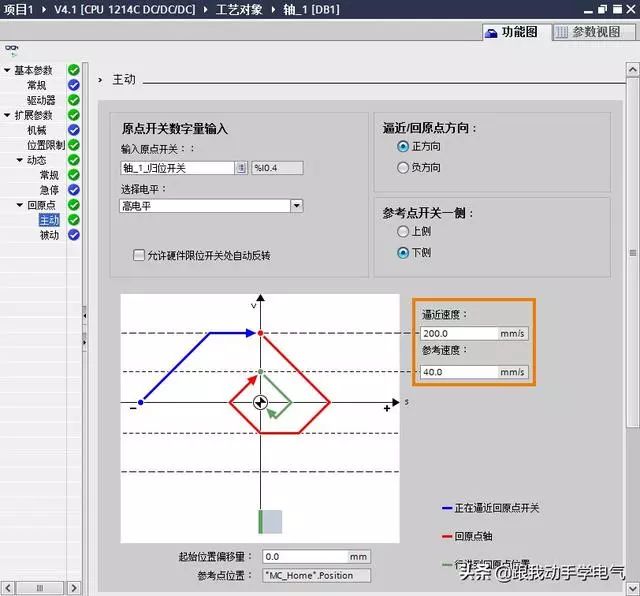
②原點開關有效時間過短,可以設置DI點濾波時間,例如上圖原點開關是I0.4,則在“設備視圖”中減小I0.4的濾波時間,默認情況下DI的濾波時間是6.4millisec,用戶根據DI點有效時間選擇合適的濾波時間。
8. 為什么軸在執行主動回原點命令時,初始方向沒有找到原點,當需要碰到限位開關掉頭繼續尋找原點開關時并沒有掉頭,而是直接報錯停止軸,報錯原因是由于軸碰到了限位開關?
答:有幾種可能:
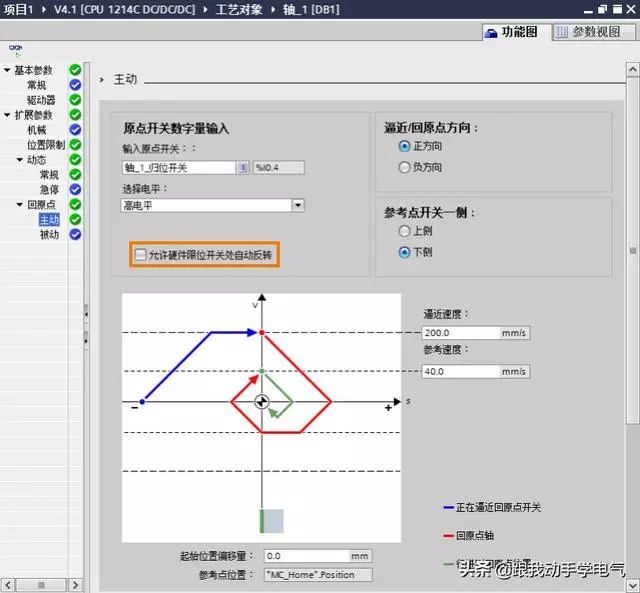
①用戶沒有使能“允許硬件限位開關處自動反轉”的選項。
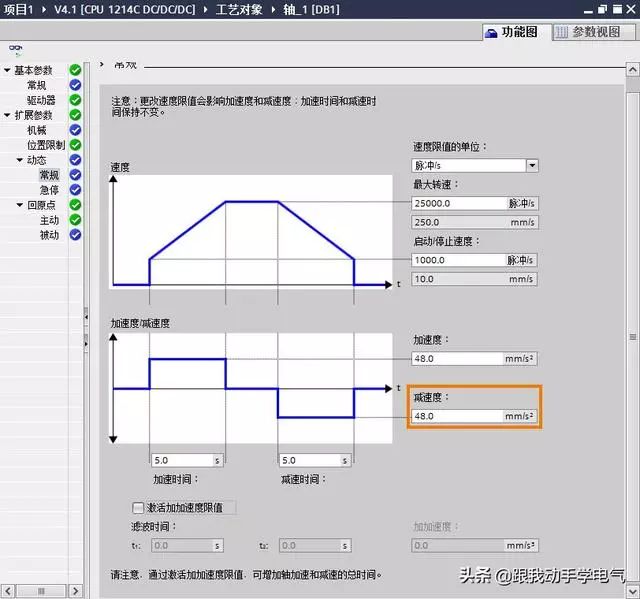
②增大組態的加速度/減速度,因為軸在主動回原點期間到達硬件限位開關,軸將以組態的減速度減速(不是以緊急減速度),然后反向運行尋找原點開關。
③增大硬件限位開關和機械停止塊間的距離。如下圖所示,正常情況下,軸按照下圖的方式掉頭尋找原點開關:

如果硬件限位開關和機械停止塊間的過近,無論如何增大“減速度”,仍舊不能正常掉頭,如下圖所示:
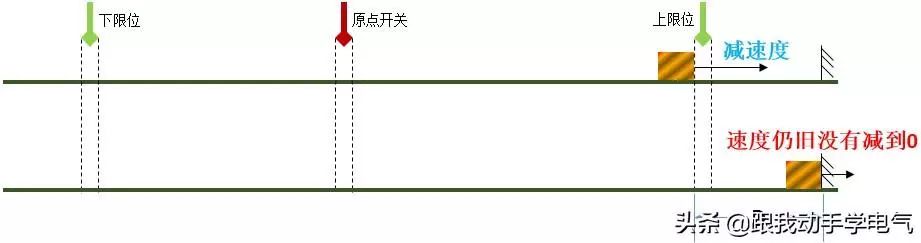
則需要增大硬件限位開關和機械停止塊間的距離,為上圖中D。
9. S7-1200 CPU上電后軸的位置是多少?
答:S7-1200 CPU每次上電后軸的位置都是0,不會保留斷電前的位置值。
-
運動控制
+關注
關注
4文章
582瀏覽量
32886 -
S7-1200
+關注
關注
11文章
331瀏覽量
18004
原文標題:S7-1200 運動控制之PTO控制方式的常問問題
文章出處:【微信號:gongkongBBS,微信公眾號:工控網智造工程師】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
經典案例分析之西門子s7_1200 與v80伺服運動控制

基于S7-1200的運動控制功能介紹

基于S7-1200的PLC的編程及擴展
基于S7-1200與S120實現TO位置控制的設計

基于S7-1200PLC運動控制編程及調試


西門子S7-1200與V80伺服進行運動控制實例

S7-1200可編程控制器系統手冊下載
西門子S7-1200運動控制指令的使用
S7-1200有關組態控制的重要信息介紹






 工商網監
工商網監
評論