

本次主要想寫一下關于單相光伏并網逆變器的環路控制問題,即如何對系統建立數學模型, 以及選定環路調節器的參數(主要是逆變器電流環),如何減小并網電流的 THD。通常光伏逆變器的控制都是數字控制,所以本貼最后還會講如何將選定的控制器參數轉化為數字控制代碼中的參數。
概述
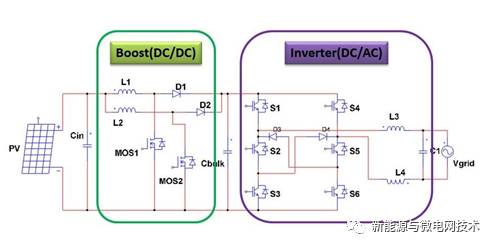
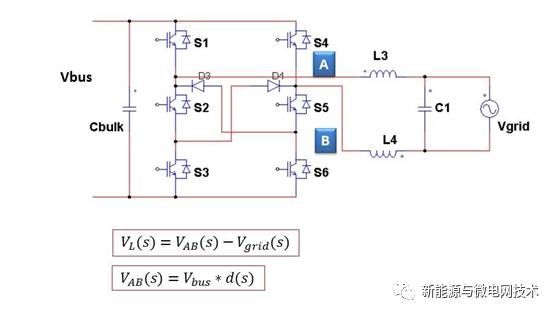
單相光伏并網逆變器的拓撲結構通常為兩級電路,前級 boost 升壓電路+后級的逆變并網 電路,這兩級電路通常需要 4 個控制環,前級:boost 的電流內環(控制 boost 電感電流)+boost 電壓外環(控制光伏電池板電壓);后級:inverter 電流環(控制逆變器電感電流)+bus 電壓 環(中間母線電壓)。電路結構如下:
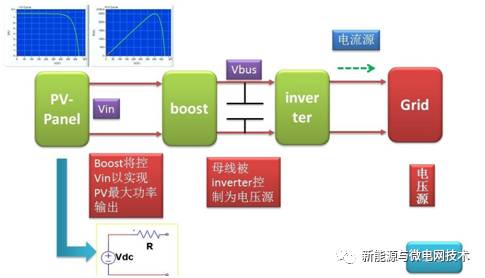
讓我們對電路的各端口的源特性進行分析一下,因為并網逆變器輸出端接的是電網,是一 個強電壓源,所以逆變器的輸出必須是一個電流源特性,因為地球人都知道,兩個電壓源不可 以并聯。如下圖:電池板的輸出既不是一個電壓源也不是一個電流源,而是相當于一個電壓源 與一個電阻串聯的端口特性,通過控制 boost 的輸入電壓(即電池板輸出電壓)可以使電池板 輸出不同的功率;中間母線被一堆大電容搞成一個相對來說穩定的電壓源,把電路的前后兩級 從控制的級別解耦開;inverter 的輸出需要被控制成一個電流源;
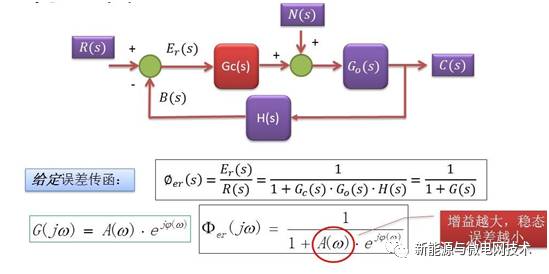
說到控制,直白的說就是讓目標控制量盡可能的跟蹤給定量,那么控制的穩態誤差為 0(目 標量與給定量)的條件是啥:當然大家都知道:控制系統實現對某一頻率信號控制的穩態誤差 為 0 的條件是——系統開環 bode 圖(或者控制器的 bode 圖)在此頻率點具有無限大增益。
上一張圖給大家說明:將一個閉環系統的輸入輸出傳遞函數寫出來后,可以得出,某個頻 率點對應的增益越大,穩態誤差越小。
前級 boost 電路的控制,無論內環還是外環,都是控制的直流量,并且控制目標為外環的 電壓(即 PV 板的電壓)。所以 boost 級的控制參數設計僅以開環 bode 圖能夠實現高增益(系 統穩定的前提下)為目標即可。因為有朋友問過我為什么前級 boost 要用雙環,所以這里插入 一段解釋一下:
實際上前級 boost 用雙環有 3 個作用:
1)電流限幅。當光伏曲線為低電壓大電流的時候,可以對電流環給定進行限幅以保證系 統安全工作在一個非最大功率點的位置。
第一點很好理解,對外環的輸出(即內環的給定)限幅,就可以對電流進行限幅,保證其 不會超過額定電流穩定工作。
2)防止電感電流變化太快而造成器件損壞或者電感飽和。
3)電壓環降階,電壓環由二階振蕩系統變為一階系統。第 2 條和第 3 條可以一起解釋。
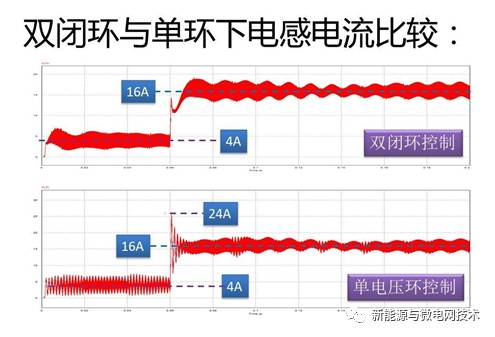
先來看一下單環和雙環的仿真結果對比:下圖中,在輸入功率突然增加的時候,同樣是從4A 突變到 16A,雙閉環系統的電流振蕩明顯好很多,因此第 2 條就很好解釋。
那么為什么會出先這個情況,就是第三條。單環系統的傳遞函數是一個二階振蕩環節,而 雙閉環系統則是一個一階系統。
我們從傳遞函數和 bode 圖來看:
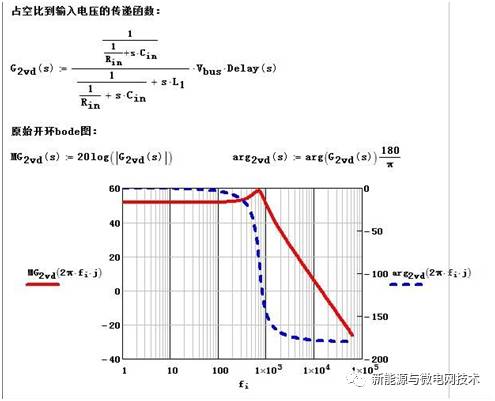
第一圖是從占空比到電壓的傳遞函數及 bode 圖,即只有一個單電壓環時候,其傳遞函數 有一對共軛極點,所以有一個振蕩點。用 PI 調節器去控制,這個振蕩怎么都會存在,表現在 波形上就是上圖的情況。(bode 圖中實線為幅頻特性,坐標軸為左邊;虛線為相頻特性,坐 標軸為右邊,下同。)
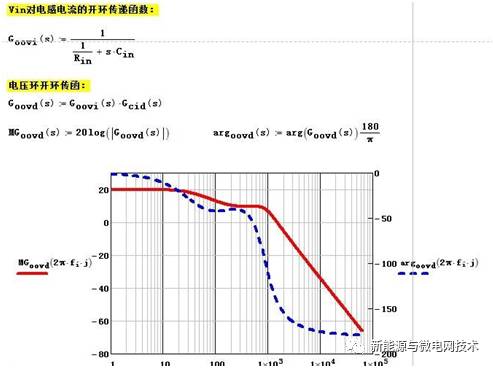
而加入電流內環以后,電流內環調好之后,整個電流內環的閉環會化解為一個比例環節(在 電流環帶寬范圍內),電壓環就會降階為一個一階系統,不會存在振蕩現象了。
inverter 的環路控制
我們主要討論后級 inverter 的控制,inverter 的電感電流為被控電流,間接的也是并網電 流的控制量(LC 濾波器情況,LCL 濾波器不在這里討論),因此 inverter 電流內環的電流波形 質量的控制非常關鍵。
對了,我們之所以可以把前后級的控制分開討論,是因為中間母線大電容在開關小信號級 上是相當于短路的,也就是前后級被母線大電容解耦。
inverter 電流環控制
我們先給出 inverter 級的電路模型以及控制框圖:
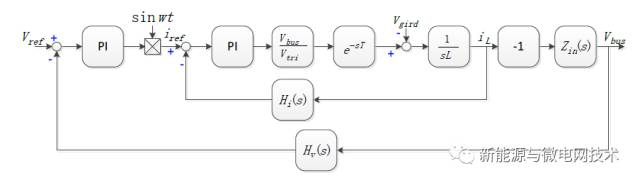
根據電路推演,可以得出電流內環以及 Vbus 電壓外環的雙環控制框圖:
逆變器可以看做一個穩態工作點在變化的 buck 電路,所以建立小信號模型時候類似于 buck 電路,建模過程呢,簡單說一下,首先將電網 Vg 看做一個擾動量,在建模時候不加考慮。先對儲能元件(通常是電感和電容)列出微分方程,然后對微分方程中的變量(隨著開關閉合 會變化的量)加入小信號擾動,然后化解方程,將不含微分因子項和微分因子乘積的項均去掉, 然后對剩下的部分做拉氏變換,就會得到小信號模型,將兩個小信號模型方程(電容一個,電感一個)化解就會得到占空比到電感電流的傳函或者占空比到電容電壓的傳函。那么單相并網 逆變器的占空比到電感電流的傳函如下:
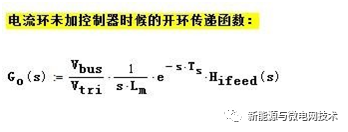
看起來很簡單是不是,呵呵!
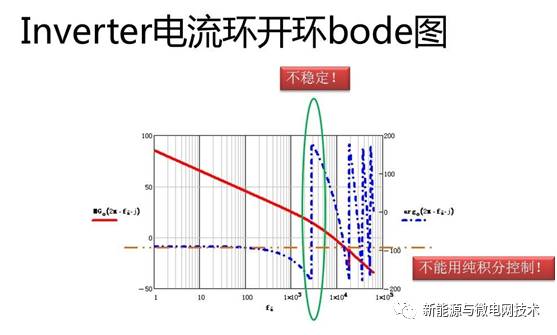
其 bode 圖如下:相角為-180 度時候,幅值仍然大于 0 分貝,因此系統不穩定;系統起始 相角為-90,如果使用純積分控制,則起始相角會變成-180,且沒有響應的零點來拉回相角, 因此電流環調節器必須是帶有一個零點、一個積分(起始幅值斜率為-40db/dec,可以提高低 頻部分的增益,減小低頻部分穩態誤差)的環節,那么 PI 調節器就是這樣的控制器。
加入 PI 調節器后的開環 bode 圖:在 mathcad 中動態調整 Kp、Ki 的值,保證在低頻增 益足夠高(穿越頻率足夠大)的情況下,使幅值穿越 0 分貝線時候相角值大于-180 度大約 20db 以上。這樣系統即穩定又穩態誤差又小。
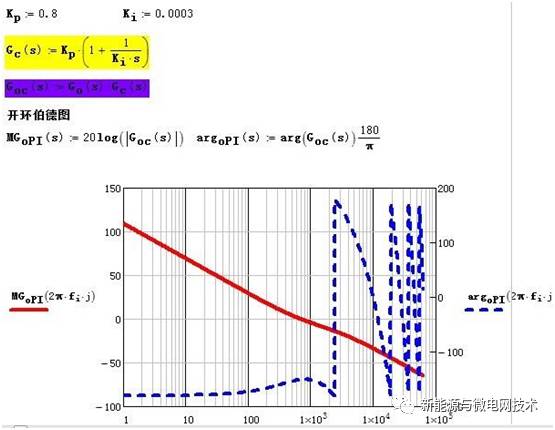
大家平時肯定也有經驗,就是對交流信號控制的時候,總是不能完全跟蹤,即輸出與給定 是由靜差的。這一點可以從 bode 圖上看出來,在 50Hz 處,可以看到其增益是一個有限值, 根據我們前面所說,對某一頻率信號實現無靜差控制的條件是其開環增益在此頻率點的增益為 無限大,比如一個帶積分環節的傳遞函數,在 0HZ(即直流)處的增益就是無限大的。因此 PI 調節器可以對直流信號實現無靜差控制。那么交流信號,通常頻率為 50Hz,在此處的開環 增益往往不是無限大,因此通常調節器對交流信號往往是有差控制,這也是輸出并網電流 THD 形成的一個原因。
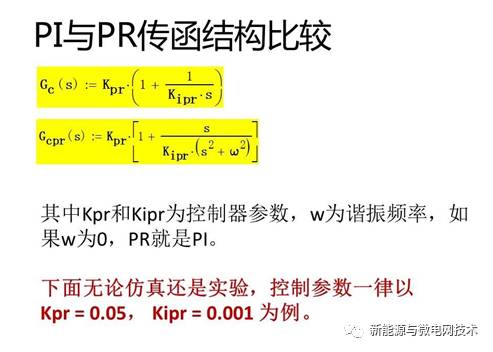
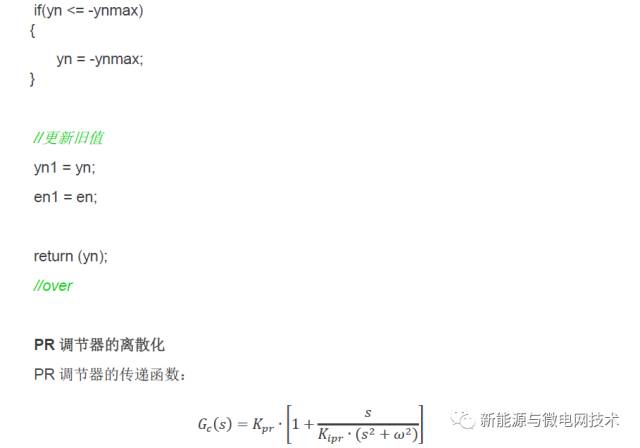
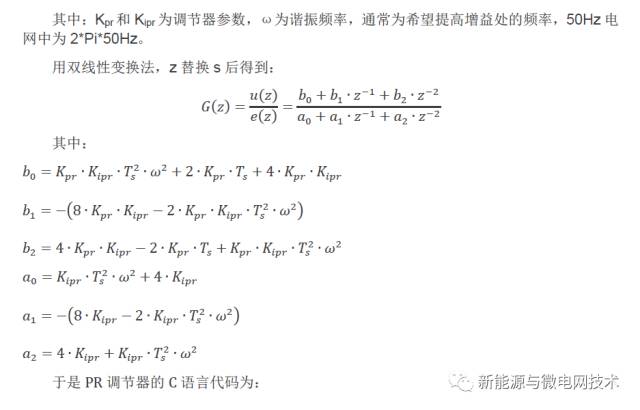
為了解決在 50Hz 處增益的問題,現在很多人使用比例諧振調節器(PR),這個調節器在 諧振頻率處可以使增益達到一個比較高的點。我先放上傳遞函數和 bode 圖:
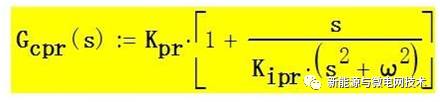
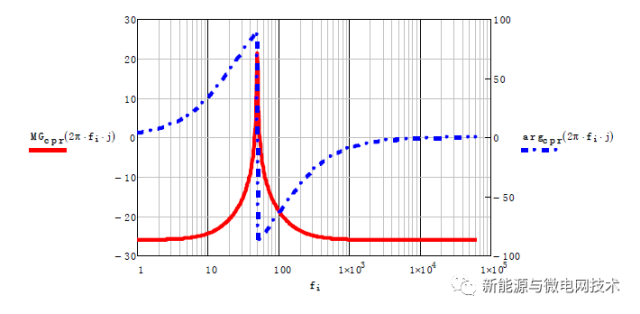
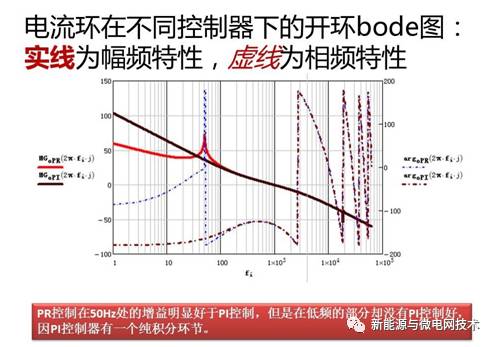
從 PR 調節器的 bode 圖中可以可以看出,與 PI 調節器在頻率越低出增益越大(直流處理 論增益無窮大)不同,PR 調節器幅頻特性在 50Hz(諧振頻率)處的增益很大,因為可以特 別改善 50Hz 頻率的波形控制。
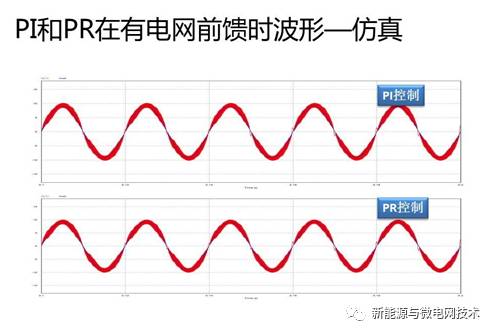
當然無圖無真相,無實驗無說服力,下面 PO 仿真波形 VS 實驗波形:
當然我們肉眼凡胎,看不出差別,下面上 THD 分析:其中 Ithd1 為對電流波形的 THD 測 量:結果顯而易見

當然,有的同學說這不行,你得弄點讓我們從波形上能看出來的東東證明,那好吧。我們看看在小功率的時候控制情況對比:(白底圖為仿真對比,黑圖為實驗對比)
在 PI 調節器的控制下,波形的基波分量已經偏離給定正弦波太多,而 PR 調節器控制下, 電流的基波分量仍然跟隨給定信號。
BUS 電壓環設計
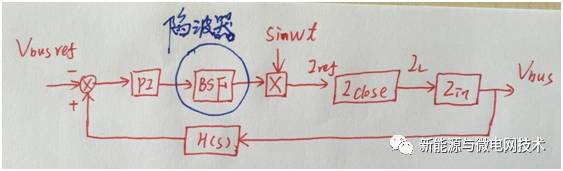
在確定好內環的調節器參數之后,可以設計母線外環了,母線外環的設計需要注意一點,單相光伏并網逆變器與功率因數校正電路(PFC)有相似的地方,就是流入電網(PFC 電路是流出電網)的電流必須為正弦,因此母線環的設計就不能將帶寬設計的太高。先把控制框圖PO 上再說:
電流環設計好之后可以合并為一個環節。整個框圖就會簡化為圖中下面的框圖。首先明確一點,由于并網功率的脈動(50HZ 電壓乘以 50Hz 電流,所以交流功率為 100Hz的脈動功率),導致中間母線上出現 100Hz 的紋波(即二次紋波),而這個二次紋波會影響到 并網電流的諧波,導致并網電流中出現嚴重的 3 次諧波,也是導致并網電流 THD 大的主要原 因。從控制框圖可以中看出,bus 電壓環的調節器輸出再乘以單位正弦信號 sinwt 就是電流環 的參考輸入,那么這個 bus 電壓環調節器輸出中如果含有 2 次紋波,那么電流環的參考輸入 信號中就會含有 3 次諧波。這個 3 次諧波是電流環的調節器如何設計都去不掉的,因為它在 給定的參考信號里。
所以從并網電流的 THD 的角度來考慮,最理想的情況就是 bus 電壓環的 PI 調節器輸出 為一個平直的信號。而從控制框圖中我們可以看到,BUS 的參考信號是給定的定值,沒有問 題,但是 BUS 的采樣反饋信號是含有 2 次紋波的,它們的差值也是含有 2 次紋波的,所以這 就需要 BUS 的調節器能夠濾除差值信號中的 2 次紋波(調節器的實質就是一個濾波器),2 次 紋波通常是 100Hz,所以 BUS 的 PI 調節器的帶寬不能高于 100Hz,為了濾除 100Hz,通常 設定在 50Hz 以下。那么這樣 BUS 環的調節器帶寬很低,增益必然也很低,所以 BUS 的動態 響應必然不會快,穩態誤差有可能也會受到影響。
一般情況下,就只能面對這個現實了,呵呵,在追求輸出電流 THD 的是時候就要犧牲母 線環路的帶寬和增益,萬事沒有完美,大家懂的。
即便輸出電流 3 次諧波與母線環帶寬增益不可兼得,那也不可任之妄為,對不對!數字控 制嘛,只要中斷時間還有,只要 ROM 還能放得下,那就要爭取最后一絲希望,沒羞沒臊的干下去~~~
母線環不甘心那么點點帶寬和增益,不然母線穩不住,大局 hold 不住,腫么辦?不就是 個 2 次紋波么,單挑它!
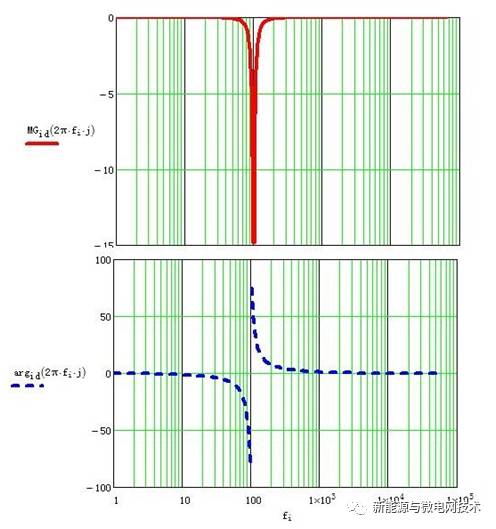
前面說了 PR 調節器可以單獨提高 50Hz 的增益,那么現在我們用個陷波器,單獨濾除 100Hz 的增益。陷波器是個蝦米玩意呢?實際就是個帶阻濾波器,他的傳遞函數以及 bode 圖如下:fc 為陷波器的中心頻率,fb 為陷波的寬度。
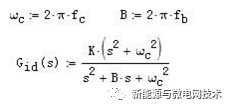
把這個環節加在 BUS 環的 PI 調節器之后,和 sinwt 相乘的信號之前。就可以把電流環給 定中的 3 次諧波大大減小。(因為 2 次紋波乘以 sinwt,出來就是 3 次諧波)。
本來這個也要有仿真波形和實驗波形對比,但是我把實驗的波形搞丟了,沒找到,現在機 器也不在我手里啦,也不能現取波形了,但是我有仿真波形驗證,呵呵!
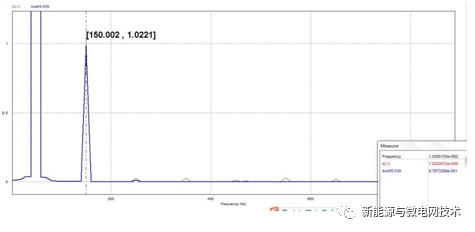
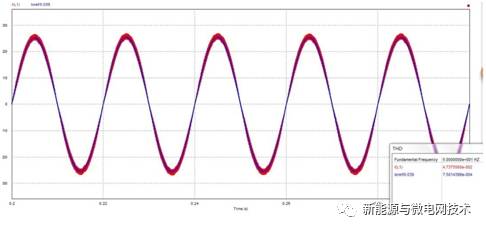
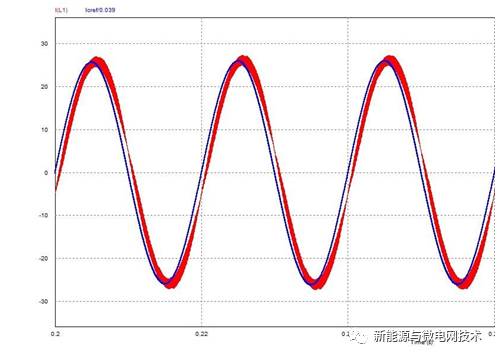
首先來不加陷波器時候的電流波形以及其 THD 分析:紅色為電感電流波形,藍色為電流 參考信號波形;可以看出正弦波稍微有點“偏頭”,這實際就是由于 3 次諧波稍大,右下角的可 以看到 THD 為 6.2%左右(感覺 THD 挺大是不,呵呵,因為仿真的 THD 分析是一直分析到 500kHz,大約 1 萬次諧波,而實驗中 THD 一般分析到 50 次左右。)
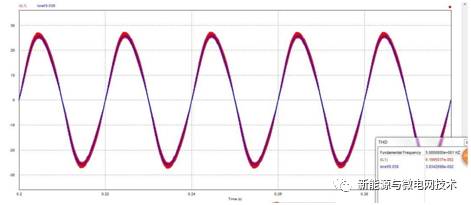
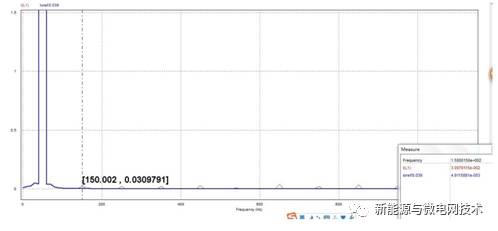
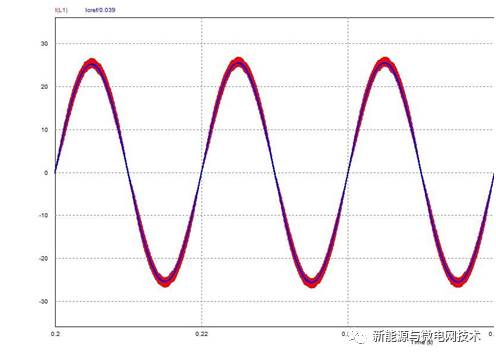
下面的波形是加入陷波器之后的仿真結果:波形“偏頭”不明顯了,從右下角可以看到 THD 為 4.7%左右
當然有的童鞋會說,我沒用你所謂的陷波器,電流也沒有這么偏頭的厲害。我前面說過, 瘋狂降低 BUS 環路的增益和帶寬,是可以實現對電流環 3 次諧波的抑制的。
當然所有事情有得必有失,無論 PR 調節器還是陷波器,都對 DSP 的能力(精度和運算 速度)要求比較高。
電網前饋的問題
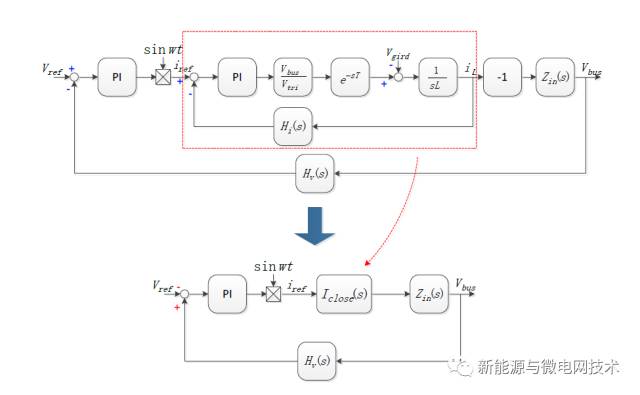
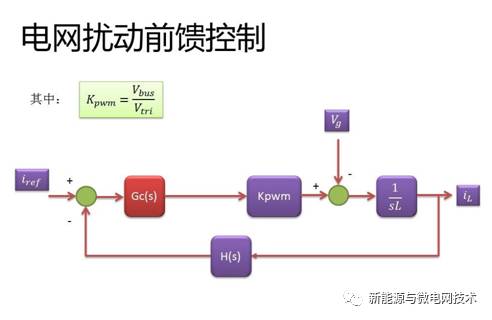
通常單相光伏并網逆變器的控制中會加入電網前饋控制,用來盡快抵消電網的擾動對電流環的影響。我們先來從控制的角度看一下電網擾動帶來的誤差影響:下面是電流環的控制框圖,
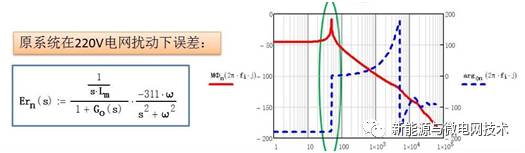
其中電網 Vg 的影響位置如圖所示:其中 Vg 就是框圖中的 N(s),誤差 En(s)為參考信號與反 饋信號之差。
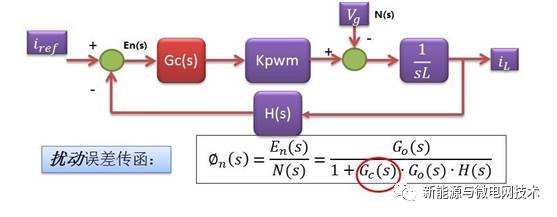
將參數代入后可以得到 220Vac 電網擾動下的誤差 bode 圖:在 50Hz 處,擾動增益較大。從上面的圖中可以看到控制器 Gc 的增益可以影響誤差信號,也就是說增大控制器 Gc 在增益 就可以減小誤差。
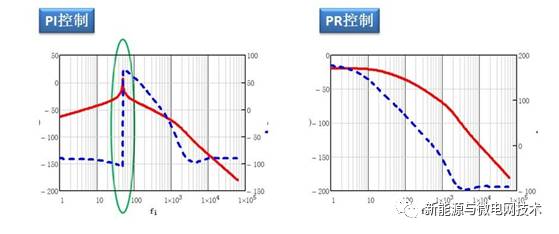
順便從 bode 圖上對比一下電流環 PI 控制器和 PR 控制器對擾動誤差的影響:
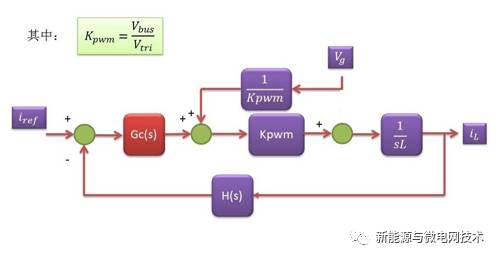
為了快速抑制電網擾動對電流環的影響,很好的辦法就是將電網電網信號前饋。我們從控 制框圖上來解釋一下:第一個圖所示為電網擾動的實際位置,根據方框圖的變換法則,在第 2 個圖的位置加入這個信號,就可以與原來的信號相抵消。這就是前饋的做法。在實際操作中就 是:電網*載波幅值/母線電壓,將這個結果加在 PI 調節器的輸出上面。
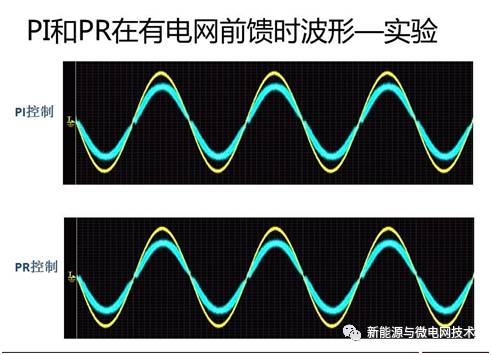
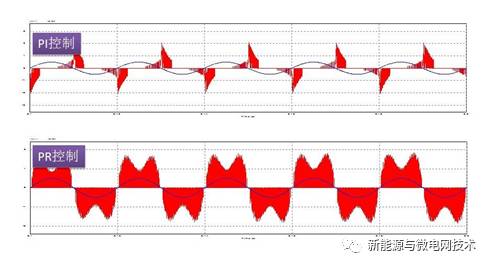
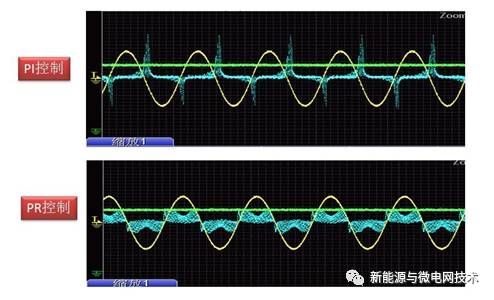
同樣我們進行一下仿真驗證,電流環統一用 PI 調節器控制:第 1 圖為無電網前饋,第 2圖為有電網前饋,效果顯而易見。(藍色為給定的電流參考信號,紅色為電感電流信號)
控制器的離散化
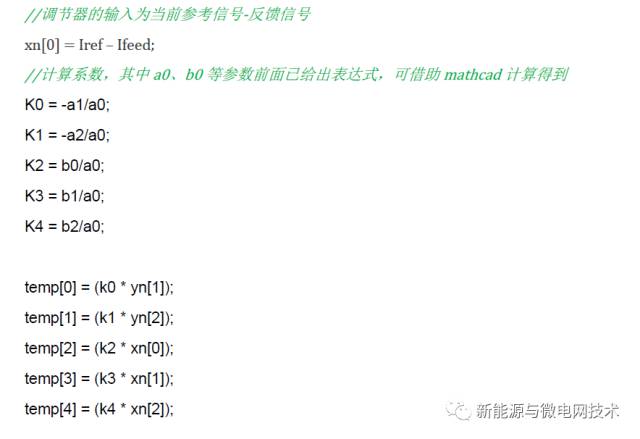
在用 DSP 實現數字控制的時候,要把控制的部分寫成代碼才能實現,所以需要把控制器 或者濾波器寫成數字控制器或者數字濾波器,也就是離散化。很多初學寶寶估計把控制書上的 離散化過程看了好多遍還是不知道在實際操作中怎么把一個傳遞函數變成程序代碼。今天就把 自己做數字控制時候的轉換方法給大家說一下。
首先要明確一點,任何調節器、濾波器離散化成為代碼的時候都是固定的格式,就是如下, 根據不同的傳遞函數,其中有些系數有可能是相同的:
y(n) = k1*y(n-1) + k2*y(n-2) + ... + kN*y(n-N) + kN+1*e(n) + kN+2*e(n-1) + ... + kN+N*e(n-N)
其中 y(n)為調節器的最新輸出,y(n-1)、y(n-2)為前一次、前 2 次的輸出。
其中 e(n)為調節器的最新輸入(參考-反饋的誤差),e(n-1)、e(n-2)為前一次、前 2 次的 輸入。
具體要取到多少舊值,取決于調節器或者濾波器傳遞函數 s 的最高次冪。
然后要在每次計算之后更新舊值,例如:
y(n-2) = y(n-1);
y(n-1) = y(n);
e(n-2) = e(n-1);
e(n-1) = e(n);
離散化的方法通常用的有 3 種:
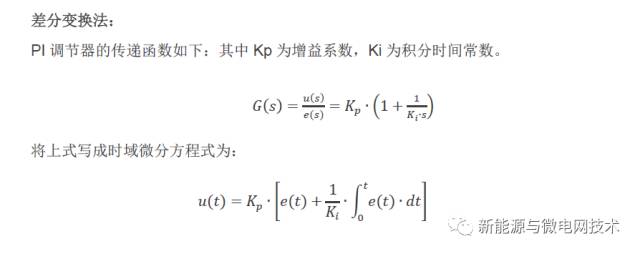
1、差分變換法
2、零階保持器法
3、雙線性變換法
在這里我不講這三種方法的原理,因為教科書上面都有。我只以 PI 調節器為例,分別說 明這三種方法怎么用。




-
數學模型
+關注
關注
0文章
83瀏覽量
12207 -
光伏并網逆變器
+關注
關注
4文章
82瀏覽量
23690
原文標題:單相光伏并網逆變器的環路控制
文章出處:【微信號:Micro_Grid,微信公眾號:電力電子技術與新能源】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
時變移動通信系統功率控制算法與仿真研究
多電機數學模型推導
PMSM的基本數學模型和各個坐標變換之間的關系
建立永磁同步電機的數學模型
光伏系統的數學模型的Simulink仿真

單相光伏并網逆變器的環路控制

永磁同步電機的數學模型





 工商網監
工商網監

評論