 如何實現ABB機器人和視覺系統進行通訊詳細教程和方法說明
如何實現ABB機器人和視覺系統進行通訊詳細教程和方法說明
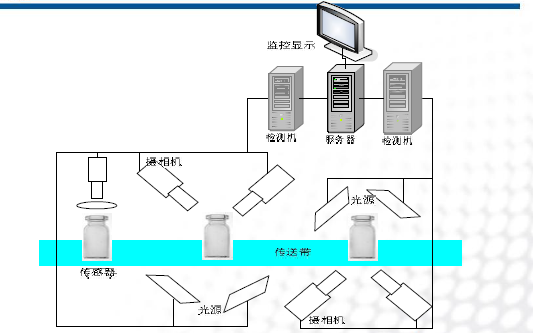
如何實現ABB機器人和視覺系統間的TCP/IP通訊呢?首先我們先看下通訊效果,然后我們再來解開通訊背后的秘密。
ABB機器人實現TCP/IP通訊的前提是必須要有616-1 PC Interface選項功能,如下圖是ABB官方對于PCInterface選項功能的介紹:
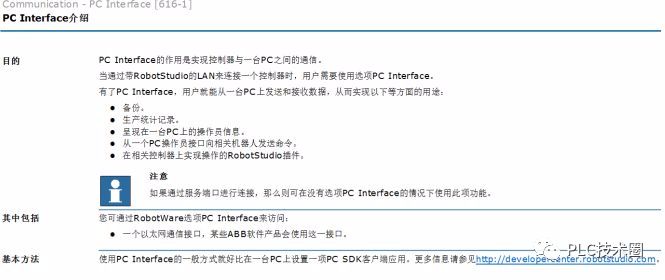
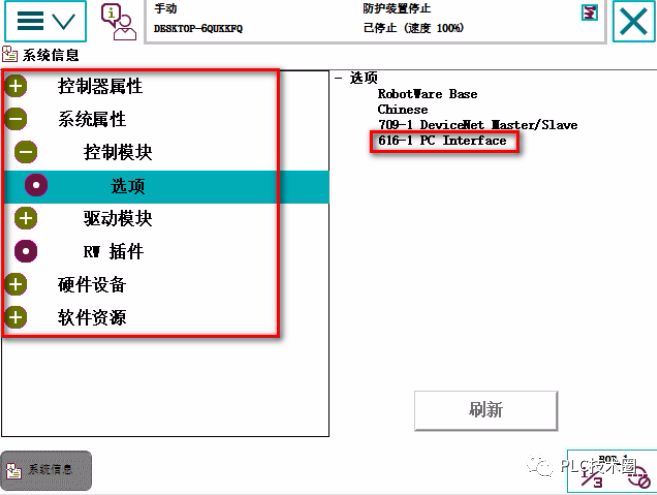
所以,當我們在真實機器人系統上想實現TCP/IP通訊要先檢查下系統是否含此選項功能,參考如下界面:
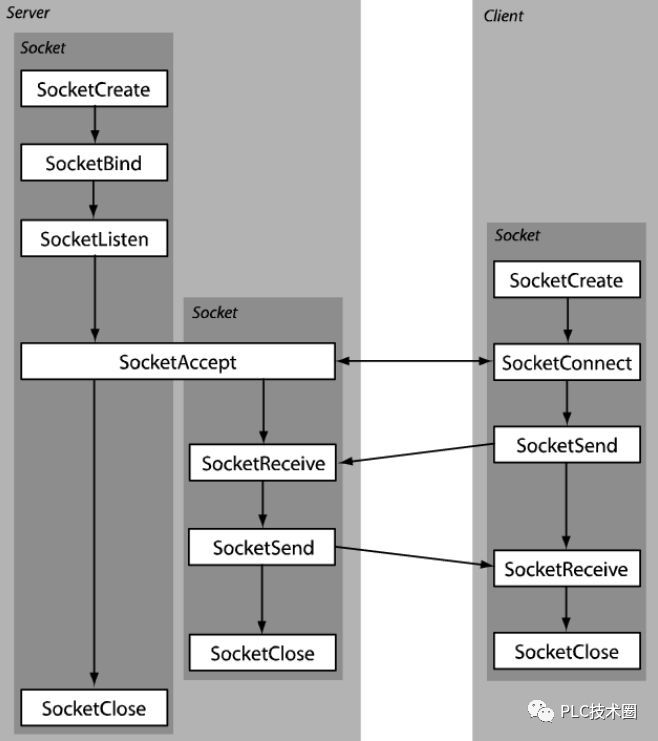
TCP是因特網中的傳輸層協議,使用三次握手協議建立連接,過程比較復雜,實際使用中,我們可以用socket編程接口實現服務器與客戶端間的通訊,關于TCP/IP與socket之間的關系大家可以查閱相關資料,下圖是ABB機器人使用socket接口實現通信的過程。
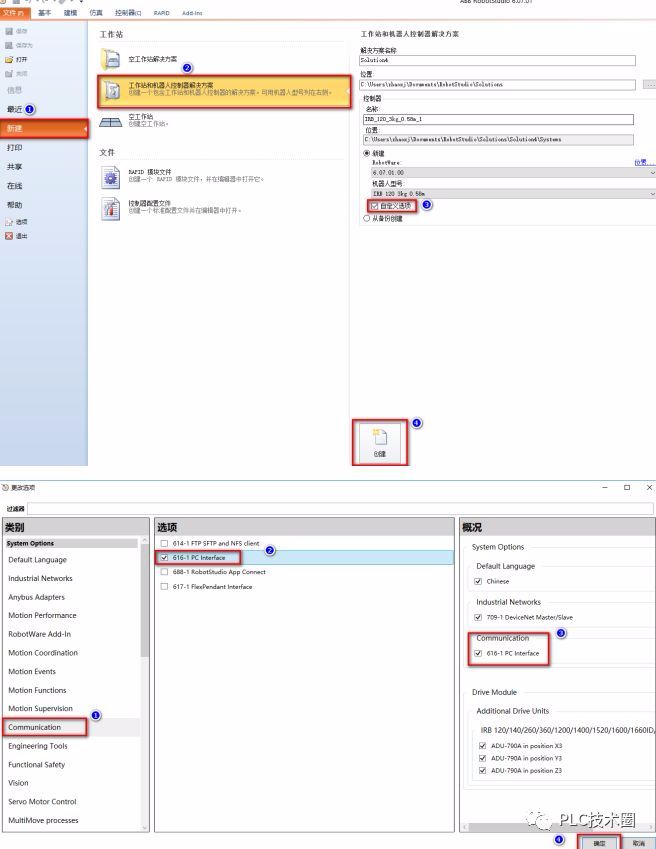
下面我們在RobotStudio軟件中模擬機器人實現此功能的過程(這里我們把機器人作為客戶端client使用):
第一步,創建機器人系統,這里要注意參考圖片把PCInterface選項加入。
第二步,新建程序模塊及例行程序。
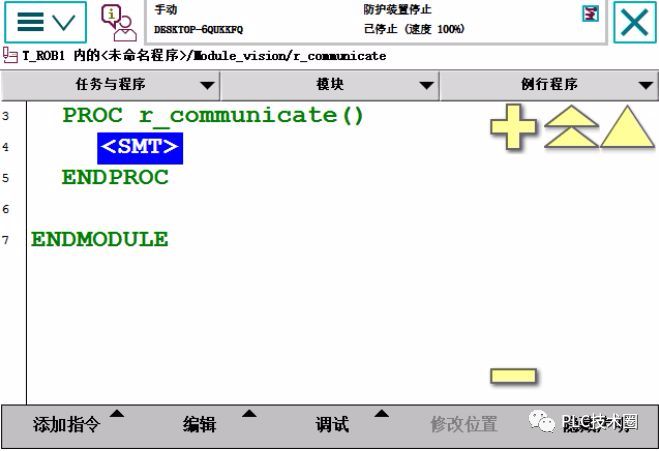
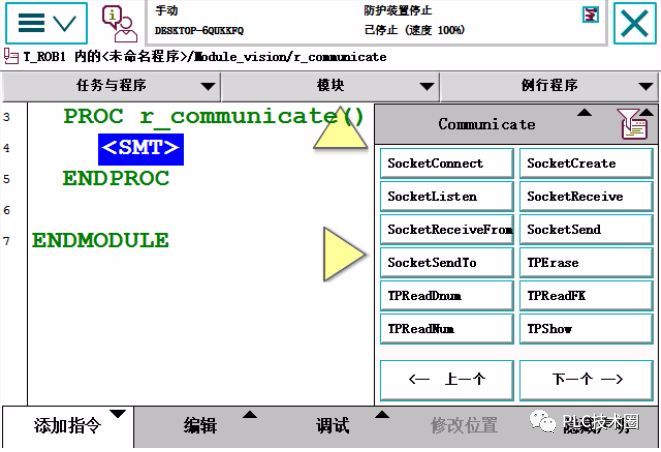
通訊相關指令在Communicate指令集下。
第三步,編寫程序,具體程序如下:
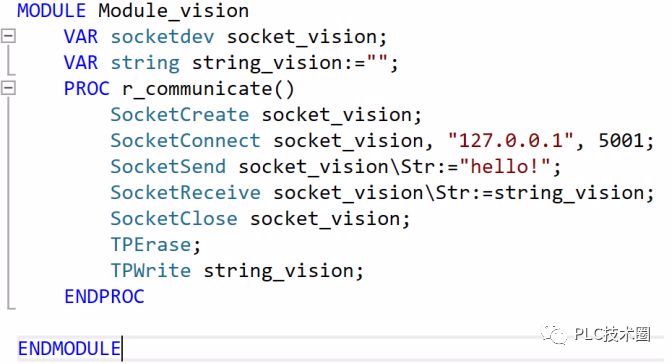
SocketCreate socket_vision;
!創建套接字,用于連接遠程計算機,這里注意,下面編程是把機器人作為客戶端,遠程計算機作為服務器的
SocketConnect socket_vision,“127.0.0.1”,5001;
!連接遠程計算機,這里要寫明遠程計算機的IP地址和通訊雙方共用的端口號。注意,在真實機器人系統上,遠程計算機網口和機器人LAN口或WAN口間要用網線做好連接,并將計算機IP地址設置和機器人IP地址同一網段,此外,端口號不可隨意設置,一般不會用0~1023之間的數字。這里為了和本機上TCP/IP測試工具間實現通訊,IP地址設為回送地址 “127.0.0.1”
SocketSend socket_visionStr:="hello!";
!向遠程計算機發送信息,發送內容可以為具體字符串,也可以是string型變量
SocketReceive socket_visionStr:=string_vision;
!接收來自遠程計算機發送過來的數據,存儲在string_vision變量中,注意,string_vision存儲類型必須為變量,數據類型為string
SocketClose socket_vision;
-
機器人
+關注
關注
211文章
28524瀏覽量
207554 -
TCP
+關注
關注
8文章
1374瀏覽量
79147 -
ABB
+關注
關注
26文章
525瀏覽量
52798 -
視覺系統
+關注
關注
3文章
336瀏覽量
30787
原文標題:ABB機器人和視覺系統通訊的教程和方法
文章出處:【微信號:xue_PLC,微信公眾號:PLC技術圈】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
嵌入式在機器人視覺系統的應用
四元數數控:工業機器人使用機器視覺系統的原因
ZN-1AI工業機器人與智能視覺系統應用實訓平臺介紹
如何實現ABB機器人和視覺系統間的TCP/IP通訊呢?

基于Memolink通訊實現機器人視覺跟蹤系統的設計
如何實現ABB機器人和視覺系統的TCP/IP通訊






 工商網監
工商網監
評論