 車路協同下的五網融合
車路協同下的五網融合
2019年7月5日,由博聞創意和CCIA 智能網聯專委會、佐智汽車舉辦的「2019中國汽車互聯與車路協同大會」在深圳舉行。興民智通首席運營官張人杰先生在會上發表了題為“車路協同趨勢下車載終端的技術和產品形態演進”的演講。
首先感謝佐智汽車的邀請,同時也感謝參會的各位朋友,今天很高興能跟大家一起交流關于車路協同趨勢下車載終端設備及相關平臺未來的技術走向。我們為什么要做車路協同?其實最本質的原因就是現在的道路已經擁塞不堪,我們需要更智能的系統調度和自適應。現在做各種自動駕駛或相關解決方案的廠商很多,其中做的最多的一塊就是自動泊車系統,但事實上在北上廣深這樣的一線城市,做自動泊車系統意義不是很大,為什么?因為大多數場合下根本找不到停車位。所以我們首先要解決資源的問題,車路協同的本質是通過通信的方式,有效地利用系統的調度和自適應功能,來完成整個交通系統的智能化。

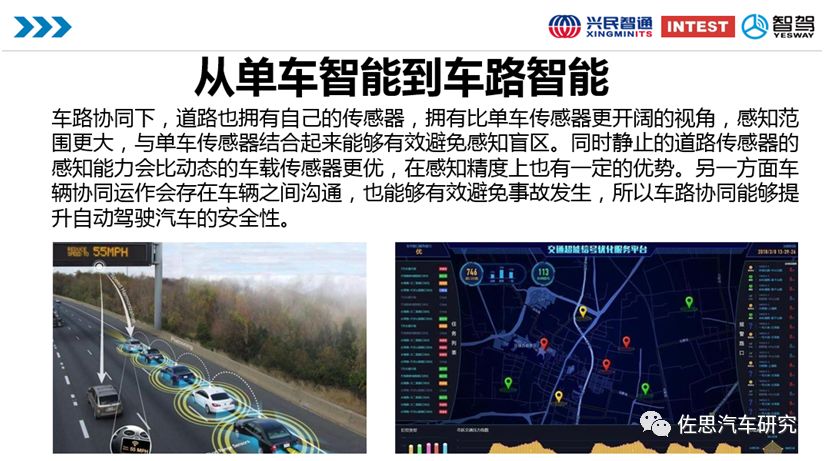
車路協同的本質是從一種系統的視角去做智慧交通,記得四五年前,包括谷歌在內的一系列做自動駕駛的廠商,他們認為單車智能的方式是可以覆蓋未來的完全自動駕駛的,但是這種思路的缺陷在于改變的只是車。這兩年我們整個行業的風向開始變化,大家逐漸意識到依靠單車智能是很難實現真正意義無人駕駛的,還需要改變道路。道路交通是由“人-車-路”組成的復雜系統,從這個層面上看,即人車耦合、車車耦合和車路耦合。針對單車,人工智能聚焦人機交互和協同,汽車開發者的視角是賦予汽車更多的感知、計算和決策功能;針對車車之間,更加關注的是車與車之間如何實現協同高效;針對整個路網系統來說,更重視的是車路之間如何實現深度耦合、提高效率。智慧道路交通系統的發展離不開這三個邏輯。
大家都坐過高鐵,高鐵和過去的傳統鐵路交通有什么不同?高鐵是一個高度智能化和電氣化的道路,高鐵實際上早就是無人駕駛,它的調度是利用信號系統之間的信息交換,司機只是起監督的作用或是在極端情況接管控制權限。
對比高鐵技術,再回過頭來看看我們研究的自動駕駛,我們的車具備智能,有一大堆的傳感器,有復雜的計算決策邏輯,但是僅僅如此并不能保證我們實現完全意義上的自動駕駛。車路協同實際上是給我們找到了一條能夠從系統的角度實現智慧交通的方式。而從產業角度,我們從業人員就要去思考,在我們所在的行業里面能做什么?是做車端的設備還是做路側的設備?還是做集中控制和調度的設備?
車路協同情況下,實際上是一種網絡的融合,也就是說它會把過去不同種類的網絡、在傳統意義上我們認為是不可能發生任何關系的網絡耦合在一起。比如道路網、傳感網、控制網、能源網,以及宏觀級的管理數據基礎平臺。

為什么要做宏觀級的管理數據基礎平臺?大家都知道我們現在并不缺數據,各行各業都有自己的大數據,因此大數據在前兩年成為最熱的行業名詞。但是大家有沒有想過,不管是我們的交通還是我們的道路,抑或我們的車廠自有數據平臺,都還是一個一個的數據孤島,并沒有形成有效的協同。有國家級的交通大數據平臺,各個車廠有自己的企業數據平臺,各級城市有新能源車的質量監控管理平臺,但是這些平臺之間并沒有實現互聯互通,所以我們做車路協同,目標就是實現一個宏觀級的數據基礎平臺,把多種網絡打通。如果能做到這樣,我們的數據就不再是孤島,就變成真正能產生價值的金礦。
剛才我聽到了前面一些嘉賓在講他們的雷達方案,其中就有如何構建智能的路。過去做自動駕駛的廠商基本上都是在構建單車智能系統,但是越來越多的系統,更多依賴系統的智能,而不是單車的智能。比如智能停車,一種方式,就是車上帶著攝像頭,滿大街去找車位,這是單車智能的方式,但更多的是一種集中式控制的車庫,上面裝備了攝像頭和各種傳感器,它能監控車輛并決定該以什么樣的調度方式來停泊車輛。我個人更傾向于第二種方式,就是從系統的角度構建智慧交通,從過去不智能的路變成未來智能的路,正如過去不智能的鐵路系統變成現在智能的高鐵系統,都是系統層面的變化。
我們再來看一下平臺這一塊。平臺會從一個綜合的數據平臺向交通即服務(TaaS)演變。對于某某即服務的概念大家應該不陌生,比如SaaS、PaaS、LaaS,去年還有一個概念是AaaS,自動駕駛即服務,就是在完全自動駕駛條件下從本質上改變車的功能。現在我們可以思考一種新的概念,把交通也變成一種服務,交通即服務,在這個系統里可以通過各種方式的接口去調用,我們現在常用的滴滴,實際上就是出行服務的平臺,可以通過滴滴的接口導入各種服務,比如說你有車,你可以放到滴滴的平臺里運營,你還可以從滴滴的平臺調用數據并創建應用。未來TaaS的范疇要遠大于現在的滴滴平臺,它可以囊括航空、火車、水路、地鐵系統、出租車、專車、單車等各種交通系統。TaaS本質上就是一種數據驅動下的交通系統的升級。
再來看車路協同的一些關鍵技術,前面的嘉賓都說得很多,比如說數據的交互、高精度的定位、車載終端、智能的路側系統等等。
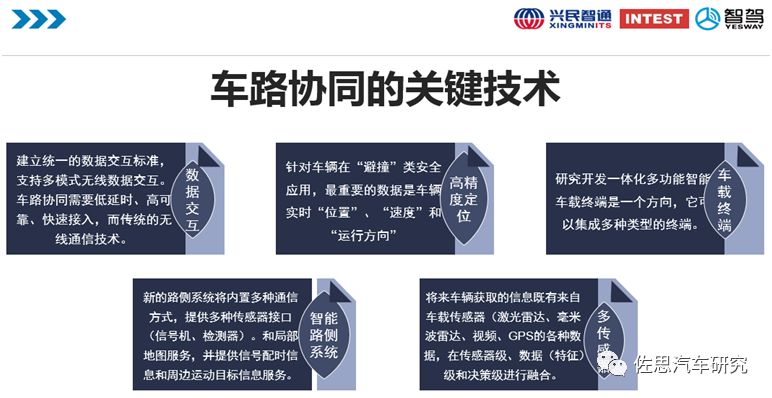
路側系統這一塊通訊廠商目前在技術上比較占優,比如華為、中興、諾基亞、愛立信等。對于車聯網廠商來說,在路側系統上的開發要趕超通信廠商,難度是非常大的,所以我建議大家把更多的心思放在車載終端這一塊,比通信人更懂車就是我們的優勢。我自己也是做通信出身,然后轉到汽車方向,我的感觸就是,通信人有在通信的各種制式、通信的基礎原理上的理解要遠勝汽車人,但要落地到汽車這樣一個垂直行業,需要更懂汽車,而這一塊是我們的優勢。
傳感器也是非常好的方向,現在越來越多的人在做激光雷達的開發,還有各類攝像頭以及紅外傳感器等。對于傳感器這一塊,實際上它有兩類用途,剛才有些嘉賓已經提到了,就是它可以做在路側,還有一種就是可以在車上,所以這兩個都是很好的業務方向。
提到車路協同,必須要提一提我們原來做的車聯網。車聯網一直是汽車跟信息科技最接近的領域,如何把一輛傳統的車變成一輛高科技的車?最快捷的方法就是把車聯網集成進去。當前的車聯網發展已經進入白熱化階段,可以看到越來越多新的入局者,比如BAT,他們在移動互聯網發展到巔峰的時候,發現也沒有太多可以做的了,是不是應該找一個新的方向呢?汽車這個領域就成了眾矢之的。移動互聯網廠商有他們的優勢,控制了移動互聯網的整個生態資源。同時,傳統做汽車電子設備的企業也不滿足于原來的業務方向,他們想,我在做電子設備的同時,是不是可以延伸到提供車聯網服務呢?車聯網就成了一個群雄爭霸的市場。由于車聯網涉及到大量新興的技術,比如說通訊技術和汽車技術的結合,移動互聯網生態的導入,是我們做車聯網產品需要積極考慮的問題。
車聯網的發展還有一個大的瓶頸,就是碎片化問題,如今但凡是有一定規模的汽車廠商,都會有自己的車聯網服務。而這些不同廠商的車聯網服務,它們之間是沒有任何關聯的,車聯網的服務就變成了一個個孤島。如何去建立一個云化的、組件化的車聯網,是我們從業人員需要去思考的。是否有可能我們把各個車廠的車聯網平臺有效地打通,讓它的數據打通,讓它的數據實現共享。只有當數據形成規模的時候,才有機會產生指數性變化的效應。
車聯網的云化和組件化可以減少碎片化和實現不同廠商車聯網之間的互聯互通。這方面我們一直在做努力,把車聯網平臺變得更加標準化、便捷化、組件化和更具備增值特性。如果大多數的車廠能夠采用相同或者相近的技術標準來建立平臺,之間的互聯互通以及未來達到城市級、省級、國家級的車聯網平臺才有機會成為可能。

我們來簡單回顧一下車聯網的發展歷程,早期的車聯網服務一般意義上指的就是TSP。什么是TSP?就是汽車遠程通訊的服務。從2015年開始,車聯網更多是順應政策和法規的要求。比如新能源車的質量監控平臺其中最重要的一個功能就是防止騙補,所以每一臺新能源車上都要求裝載T-box,這個時期的車聯網是由政策驅動的。
到了今天我們講車聯網,說的更多的是網聯化和車路協同,比如V2X技術,V2X就是幫助構建智能的車、智能的路的技術基礎之一。在這個時期我們會考慮更多實際的技術,如OBU的多網接入與融合,OBU多渠道的互聯網接入、多身份5G基站等等。
談到多身份5G基站,我們簡單說一下5G,正如我們所知,5G是一個投入巨大的工程建設,5G的基站數要比現在4G的基站數多幾十倍。而5G的基站一般會分為宏基站和微基站,其中微基站的形態和身份可能是多變的,這就是多身份5G基站的概念定義。
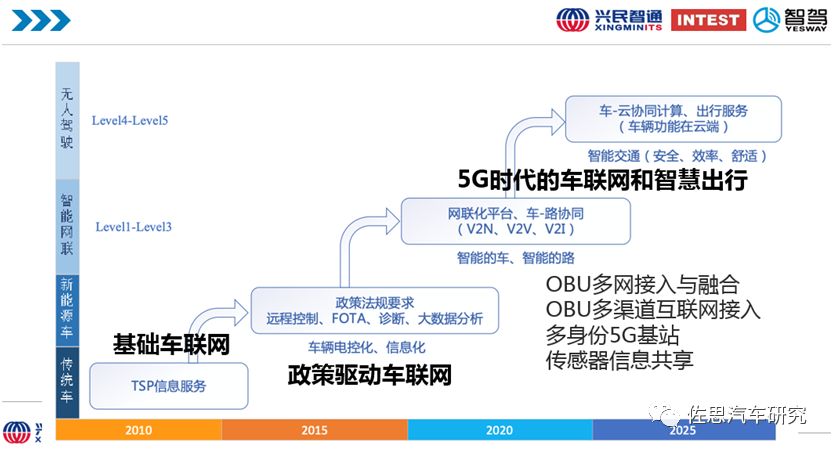
傳感器信息共享也是車路協同的重要特征之一,為什么我們要做傳感器的信息共享?V2X的目的就是讓車與車之間能夠通信、車與基礎設施能夠通信、車與人可以通信等等,通信中包含了哪些內容呢?其中有一些非常重要的信息就是車的傳感器信息,如果某輛車能通過它的攝像頭、雷達等感知到一些路況信息,它可以把這些信息通過V2X的網絡散播,其它的車不需要用傳感器就能感知到這些信息,這樣的技術可以幫助我們隨時構建新的路況信息知識圖譜。
現在做高精度地圖的企業很多,做高精度地圖的目的就是能夠把周邊的信息觀測得更細致,但是高精度地圖不是一成不變的,如果用傳統的靜態的觀點看高精度地圖,它沒有價值,動態的路況信息和環境信息會不斷重構高精度地圖。
最終我們的目的是達到一種車云的協同,即系統意義上的智慧交通,當然我們離這種終極階段還有很長的路要走。
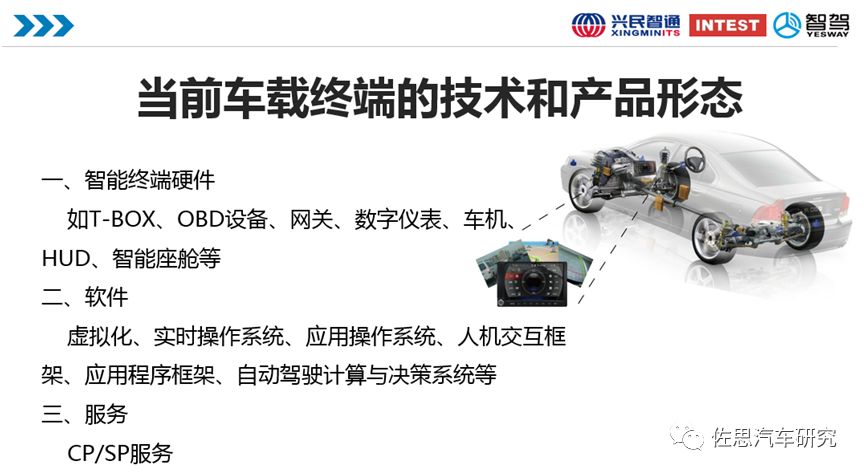
目前,我們大多數的企業還是在做跟車相關的東西,比如通訊終端,如T-Box,另外還有一些后裝的設備,如OBD盒子等。網關技術也在不斷發展,過去的網關主要是實現總線的交換功能,而現在的網關,其功能囊括了以太網等多種總線的交換、域控制器的集中管理和控制等。而儀表的發展也經歷了模擬儀表、混合儀表到全數字儀表的演變歷程。中控信息娛樂這塊,IVI車機的技術和產品形態也在發生變化,從分離獨立板卡開始向集中式智能座艙發展。
軟件定義汽車的概念越來越被大眾接入,軟件技術成了主導汽車信息技術發展的核心。舉個例子,虛擬化,這就是一種軟件技術架構,在虛擬化的基礎上可以構建很多個軟件的功能實體,完成過去由真實硬件完成的功能。還有應用操作系統,比如Linux、Android、阿里OS等,都屬于應用操作系統的概念。再看人機交互的框架,觸摸、按鍵、手勢、語音等都屬于人機交互框架的內容,這也是AI與汽車技術的重要結合點。同時還有應用程序的框架,如H5的框架或是QT的框架。自動駕駛計算與決策系統,算法是運行在某個系統之上的,比如說英偉達的基于GPU的架構,抑或是FPGA的架構、ASIC的架構。
最后是服務,有了硬件和軟件還不夠,還要做服務,CP/SP,CP是內容提供商,SP是服務提供商,過去一般就這兩類。現在開始流行去APP化,雖然本質還是CP/SP,但調用方式發生了變化,不需要顯式的APP完成,而可以直接通過系統接口直接調用完成,比如你通過語音讓IVI給你播放一首歌,這首歌是通過網易云音樂播放,還是通過QQ音樂播放,我們根本不需要意識到,這是系統調用自動適配完成的。
行業的熱點一直在變,如何保證我們能夠跟得上行業發展的速度?我們需要持續思考新的產品形態。企業想要在嚴峻的市場競爭下能夠脫穎而出,必須要有能力去構建有競爭力的新的產品形態。
產品形態有競爭力的核心基礎就是有新技術的賦能,AI還是大數據?如何與我們的車載終端系統、平臺以及后臺服務結合起來,形成新的產品形態?我們必須快人一步,想到新的點子,才有機會去把握新的形勢。現在越來越多人提All in AI,但是AI怎么落地,怎么和垂直行業緊緊地綁起來?我們不是為了做AI而做AI,做AI是為了讓我們的用戶體驗更好,而不是降低我們的用戶體驗。現在大家經常會接到一些推銷的電話,一聽是AI客服,你可能迅速就掛掉了,這就是一個悲哀,因為AI的體驗還不夠好。
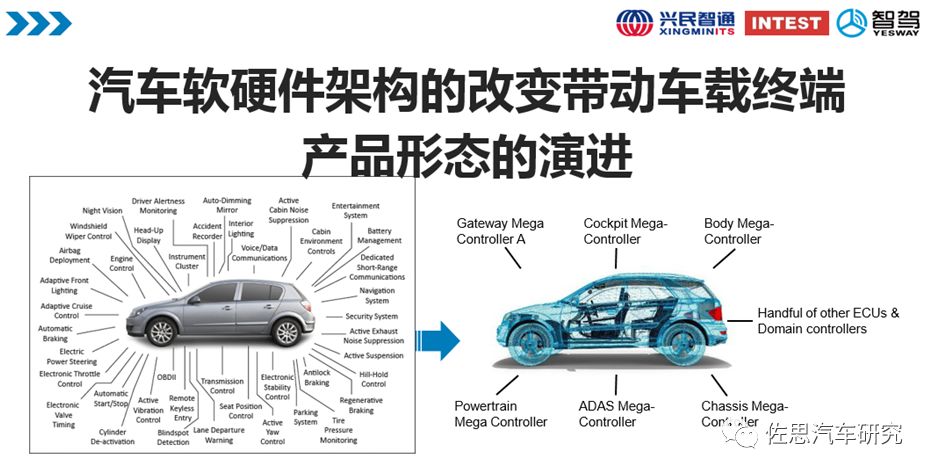
再來看一下汽車的體系架構,也在發生變化,比較明顯的趨勢是從過去多ECU集中控制的模式,向基于域控制器的分層管理模式轉變。在這種架構下,ECU通信和管理的架構發生了變化,所以產品形態也肯定隨之變化,比如域控制器、中央安全智能網關這些新的形態的出現。
大數據和區塊鏈是除了AI之外的熱門話題。大數據的核心是如何做到數據為我所用,拿到的這些數據怎樣在后期為我們提供有價值的東西,比如幫助我們的車廠去改進研發,幫助優化交通路線、交通事故的分析等。我們現在做大數據一定要基于各種場景,雖然場景這個詞已經用爛了,但是我覺得特別在智能交通管理這一塊,一定要想清楚場景的定義以及如何用我們的大數據怎么樣來為這些場景服務。

從產業的角度讓我們來看看從業者在哪些層面可能會有一些機會。比如我們正在研發新一代的T-Box,它融合了V2X的OBU的功能。因為T-Box市場現在也是紅海,要想在紅海里面活下去,必須有技術創新。把V2X OBU的功能集成到T-Box里面,是行業可以看得到的趨勢之一。
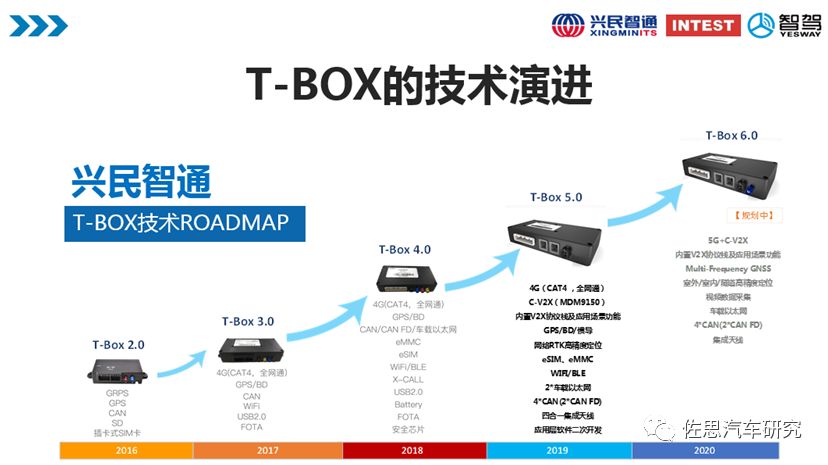
這是我們T-Box的技術演進Roadmap,從今年開始我們已經把C-V2X的功能結合到T-Box里面了,不要跟其他廠商競爭,要跟自己競爭,把V2X、慣導、高精度定位的功能做進去,讓產品更具備競爭力。
我們還在布局下一代的T-Box,包含了V2X協議棧以及場景的應用、GNSS、室外、室內、隧道里的高精度定位,以及視頻的數據采集、車載以太網、集成天線等。對于傳統的產品形態,把新技術融合進去,也可以看成新的產品形態。
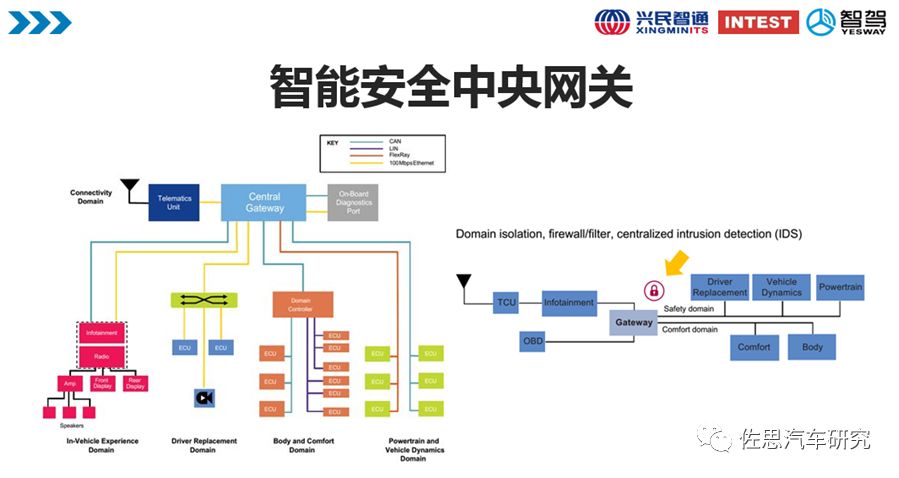
再來看另一個產品形態,就是安全智能中央網關,過去車內的網關是很簡單的產品形態,價格也很低,可能80塊錢、100塊錢的樣子,利潤空間不高。如我們剛才介紹的,系統架構在演進,新的安全智能網關把通信的功能、控制的功能、總線交換、域控制器的管理功能都做進去了,價格和利潤都會有大的提升空間。
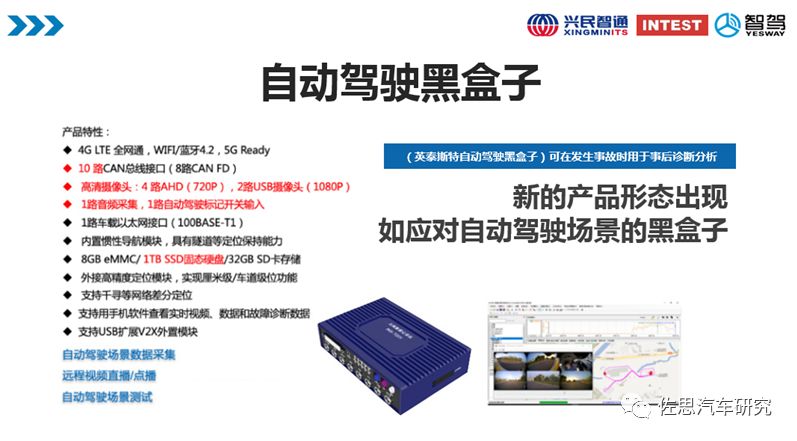
跟隨自動駕駛的行業趨勢,我們又做了一個新的產品形態,就是自動駕駛的黑盒子。其實這個產品形態不是憑空想出來的,因為我們做道路試驗做到了中國的80%-90%的市場份額,道路試驗是什么概念?簡單的說,新車出廠之前需要對CAN總線等做數據的記錄分析,就需要一個數據記錄儀。我們在傳統數據記錄儀的基礎上把它的功能強化,就變成了現在這個自動駕駛黑盒子的原型。它可以完成車內車外的視頻監控以及CAN總線的數據記錄分析,當出現事故之后,可以把數據導出做事故的事后分析。
車內設備這塊,我們來看最后一塊,智能座艙。智能座艙是直接面向用戶的終端設備,而且智能座艙的功能已經把我剛才說的包括T-Box、網關等看不見的東西隱藏在了里面。智能座艙的表現形式是人機交互,但是它的背后還有很多看不見的東西,所以本質是由可見的部分和不可見的部分結合在一起。如果乘坐在一輛自動駕駛的車里面,我們雖然不干預這輛車的行駛,但關鍵時刻需要有信息告知。有部電影叫《讓子彈飛》,影片一開始出現的就是在火車里面吃著火鍋唱著歌,突然一下子車翻了。自動駕駛的車可能也會出現這樣的情況,那么在翻車之前是不是應該給車主一些提示呢?現在的自動駕駛系統大多沒做這塊,比如可以有一個顯式的提示,提示乘客車輛現在要做變道、超車等等。在任何自動駕駛的關鍵行為切換的時候,乘客應該是得到提示的。智能座艙作為人機交互的接口,需要能把相關信息傳遞給乘客。

所以汽車的智能座艙,絕對不是很多廠商說的把手機的功能做進去就可以了,車是交通工具,智能座艙的開發目的是把車從交通工具變成能夠更好服務車主的交通工具。如果脫離了交通工具的特性去開發,只是把手機或者pad的功能放到車里,沒有太多的價值,我們需要時刻意識到這一點。人格化的人機交互是未來智能座艙的發展重點。
除了車端設備,后端的數據平臺的技術也需要不斷演進。剛才聊了很多都是終端這塊,終端需要有后臺來配合,業務平臺、基礎平臺、OEM車廠定制模塊如何有機地結合起來?因此整個后臺的技術演進也是非常重要的。
現在我們能看到的數據越來越多,過去僅僅是TSP、T-Box的數據,而現在有各種各樣的傳感器的數據也加入進來,包括車傳感器的數據,路傳感器的數據,還有人機交互的數據。車路協同下資源的管理,包括資源的組合、定制化、服務資費,最終都要在整個系統平臺里儲存、處理、分析,未來這一塊的任務也會非常重。
說到底,做車路協同要想清楚,你的商業模式在哪里,誰來買單,你怎么賺錢,你怎么配置資源,怎么把你的產品變成可運作的商業模式。
在車路協同的大趨勢下,我們的車載終端以及相關的后臺技術都在不斷地演進。很多時候我們在談車路協同的時候都是非常理想化的,但事實中國有接近3億輛存量車,如果著這些車不做智能化的改造,車路協同就無法實施,但這又給了我們后裝市場的機會。
一句話總結,車路協同給了我們更多的產業機會,但真正商業化落地還有很長的路要走。
-
自動泊車
+關注
關注
0文章
104瀏覽量
13682
原文標題:張人杰:車路協同趨勢下車載終端的技術和產品形態演進
文章出處:【微信號:zuosiqiche,微信公眾號:佐思汽車研究】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦


雷森受邀參與新一代“車路云未來交通”技術沙龍活動
C-V2X安全證書:保障車路云系統通信安全的關鍵

黑芝麻智能正式加入智能網聯汽車“車路云一體化”應用建設
5G工業路由器在智慧交通車路協同應用的深度解析
車路云協同,這次它真的來了嗎?

北醒激光雷達助力京滬“1號高速”智慧化升級
助力車路協同,基于i.MX8MPlus核心板的路側單元主控方案

華礪智行榮獲“2023車路協同優秀服務提供商”獎項

金溢科技業績大幅增長,車路協同業務優化貢獻顯著





 工商網監
工商網監
評論