 電子發(fā)燒友App
電子發(fā)燒友App


??? 關(guān)鍵詞:掃頻儀 壓控振蕩器 單片機 電壓頻率特性(V/F) 線性校正
1 引 言
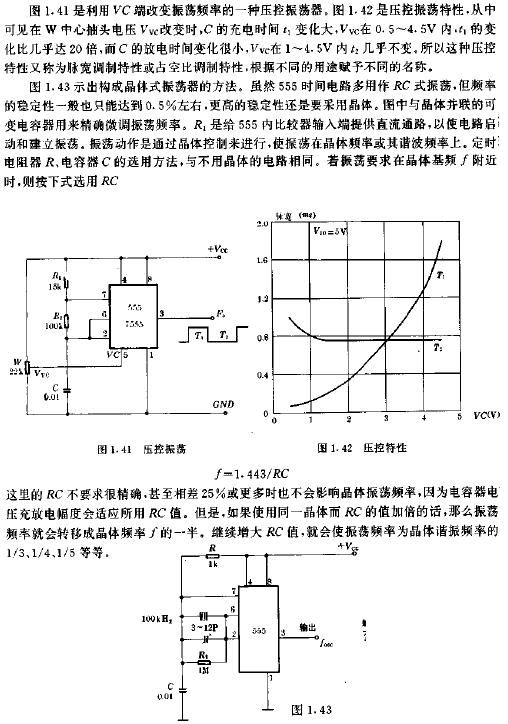
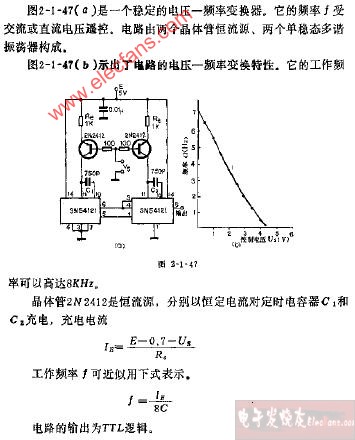
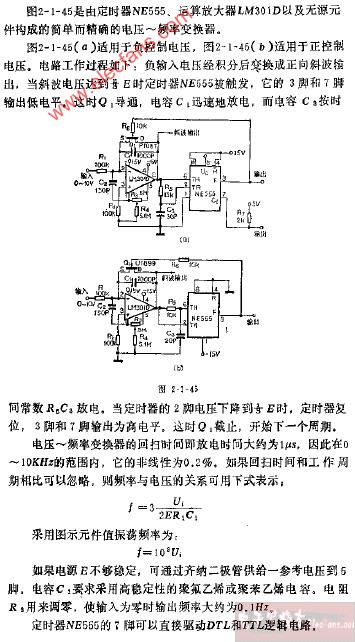
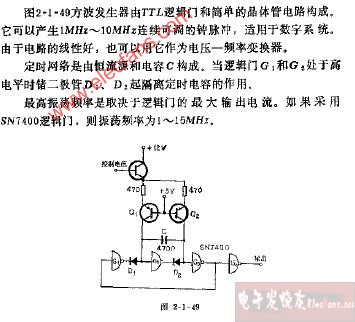
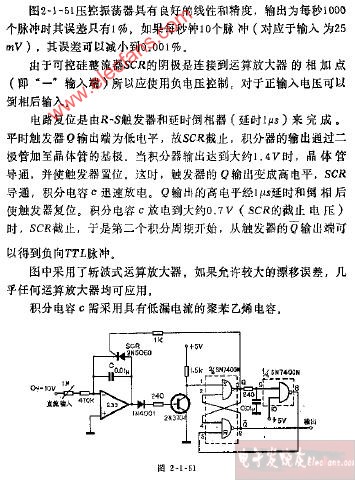
掃頻儀通常用于廣播電視設(shè)備的幅頻特性的測量。壓控振蕩器(VCO)因結(jié)構(gòu)簡單,響應(yīng)速度快,輸出頻帶寬,波形失真小等優(yōu)點,廣泛用作掃頻信號源。由于振蕩器的控制電壓uf與輸出頻率fpu之間一般不成線性關(guān)系,為保證測量的頻率準確度,需對V/F特性進行線性化。傳統(tǒng)的方法是通過由二極管和電阻組成的非線性網(wǎng)絡(luò)對控制電壓進行預(yù)失真以實現(xiàn)頻率的線性化。該方法要求獲得VCO準確的模型參數(shù)以調(diào)整校正網(wǎng)絡(luò)。用此法構(gòu)成的系統(tǒng)是一開環(huán)系統(tǒng),對各種變化和擾動沒有抑制能力。隨著元器件的老化,器件的各參數(shù)在不斷變化,校正網(wǎng)絡(luò)需要不定期進行調(diào)整。此外,變?nèi)荻O管的結(jié)電容受溫度變化影響較大,嚴重影響振蕩器的頻率穩(wěn)定度,因此,必須設(shè)法消除溫度對頻率的影響。本文提出了一種利用單片機引入反饋校正的閉環(huán)的調(diào)節(jié)方案,并給出了調(diào)節(jié)器、控制器的設(shè)計和實現(xiàn)。
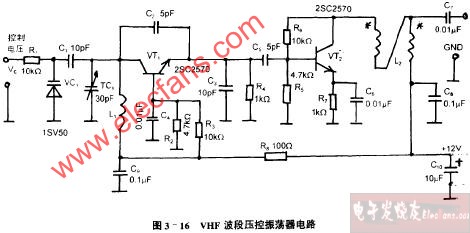
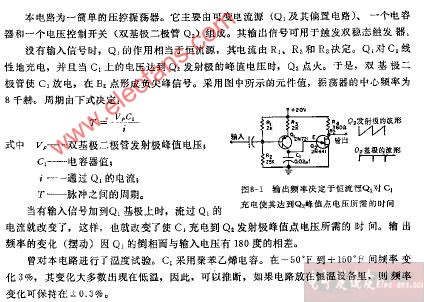
2 壓控振蕩器的V/F特性
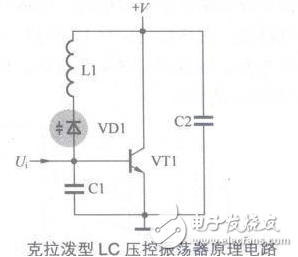
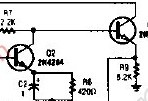
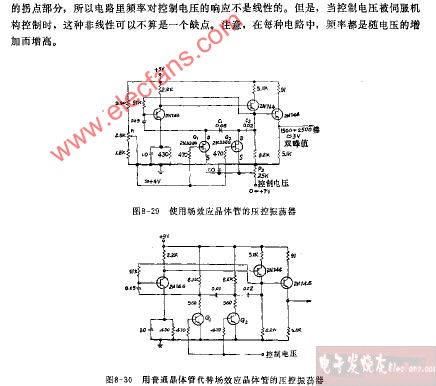
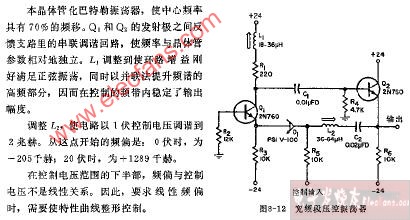
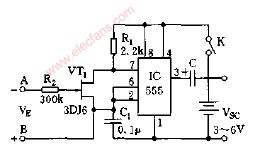
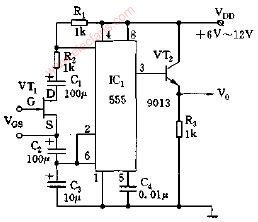
壓控振蕩器本質(zhì)上是一個在LC回路中接有變?nèi)莨艿娜c式振蕩器(見圖5)。控制電壓反向加在變?nèi)莨苌稀8淖兛刂齐妷旱拇笮】筛淖冏內(nèi)莨艿慕Y(jié)電容的大小,從而改變振蕩器的振蕩頻率 。當控制電壓在變?nèi)莨芙佑|電位VΦ與變?nèi)莨芊聪驌舸╇妷篤Br之間時,結(jié)電容與控制電壓uf的關(guān)系為:
????????????????????????????
式(1)中,Uf為控制電壓;VΦ為變?nèi)莨芙佑|電位,對于硅管,約為0.5~0.7V;C(0)為零偏置電壓時的結(jié)電容,如DKV6550B型變?nèi)莨蹸(0)>3pF;n為電容指數(shù)。又三點式振蕩器的振蕩頻率:
??????????????????????
輸出信號振蕩頻率與控制電壓Uf的關(guān)系為:
???????????????????????????  (3)
(3)
可見,當n=2時,V/F關(guān)系成線性,一般為非線性。式(3)為VCO電壓頻率的穩(wěn)態(tài)特性。
3 電壓頻率特性線性校正原理及實現(xiàn)
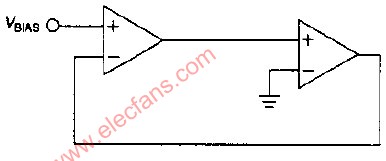
本方案采用參考模型法實現(xiàn)V/F特性的線性化,框圖如圖(1)所示。本方案利用理想模型fmu與實際系統(tǒng)fpu輸出頻率之差eu對系統(tǒng)進行校正,實現(xiàn)線性化。其關(guān)鍵是調(diào)節(jié)器和控制器的設(shè)計。
?????????????????????? 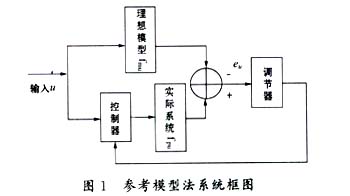
??? 在經(jīng)典的掃頻測量中,通常利用信號源產(chǎn)生一系列頻率步進的點頻信號去激勵被測網(wǎng)絡(luò),測得網(wǎng)絡(luò)的穩(wěn)態(tài)響應(yīng),求出被測網(wǎng)絡(luò)的幅頻特性。為了保證測量的頻率準確度,要求實際系統(tǒng)fpu能在各點上無穩(wěn)態(tài)誤差地跟蹤理想模型fmu的輸出。建立VCO的V/F特性的理想線性模型如下:
??????????????????????? fmu=f0+KVufLLLLLLL(4)
其中,f0為控制為0時輸出信號的頻率,v為壓控斜率。
定義誤差:
?????????????????????????? 
??? 為產(chǎn)生點頻信號,我們根據(jù)理想模型fmu計算控制電壓uf的大小,在實際系統(tǒng)fpu上加控制電壓uf,由校正網(wǎng)絡(luò)消除穩(wěn)態(tài)誤差,實現(xiàn)無穩(wěn)態(tài)誤差地跟蹤理想模型fmu的輸出。因為輸入的控制電壓Uf為階躍信號,故可以采用PI校正來消除穩(wěn)態(tài)誤差。系統(tǒng)實際結(jié)構(gòu)如圖2所示。
???????????????????????????? 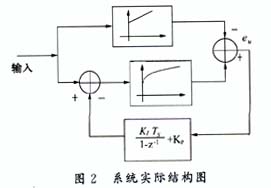
??? 其中KI為積分系數(shù),Kp為比例系數(shù),Ts為采樣周期。
??? 系統(tǒng)穩(wěn)定性和穩(wěn)態(tài)誤差分析:
由于VCO的響應(yīng)速度遠快于系統(tǒng)其它環(huán)節(jié),因此,可將VCO模型看作一純粹的非線性增益環(huán)節(jié) ,可在其當前工作點的鄰域內(nèi)對其線性化。如非線性系統(tǒng)fpu當前輸入為uc,在u′c點鄰域內(nèi)對其線性化。由Taylor級數(shù)展開得:
??????????????????????????? 
忽略二次項及高次項得非線性系統(tǒng)fpu在u點鄰域內(nèi)的動態(tài)特性:
???????????????? 
回路的傳遞函數(shù):
??????????????????? 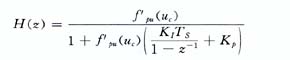
系統(tǒng)的特征方程:
???????????????????  ????????????????????????
????????????????????????
???????????????????????? 
可見,系統(tǒng)穩(wěn)態(tài)誤差收斂于0,即系統(tǒng)對階躍輸入無穩(wěn)態(tài)誤差,PI校正網(wǎng)絡(luò)能實現(xiàn)實際系統(tǒng)fp無穩(wěn)態(tài)誤差地跟蹤理想模型fmu的輸出。
4 仿真驗證
??? 我們采用MatLab對上述方案進行仿真實驗。根據(jù)上述分析,建立模型如圖(3)所示。
??????????????? 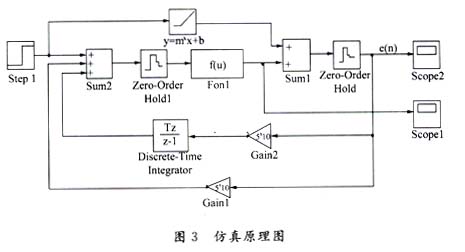
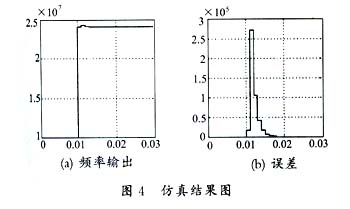
其中,輸入Step為階躍信號,非線性系統(tǒng)fpu(u)=106*(1+2u)0.5,理想模型fmu(u)=106+0.35*106,積分系數(shù)KI=0.5*10-3,比例系數(shù)KP=0.2*10-6,采樣周期TS=1ms,若計劃輸出信號頻率f=2.4*106,由理想模型可計算出輸入Step=4U(t-0.01),仿真的結(jié)果如圖(4)所示。由圖3的仿真原理圖有,fmu(4)=106+0.35*106*4=24*106,fpu=106*(1+2*4)0.5=3*106,(eu)=0.6*106。由圖可知,經(jīng)過6~7次迭代,系統(tǒng)達到穩(wěn)態(tài)。適當調(diào)整比例系數(shù)KP和積分系數(shù)KI的大小可以改善系統(tǒng)的響應(yīng)速度和其它動態(tài)特性。
?????????????????????? 
5 對溫度影響的抑制
溫度對VCO的影響主要體現(xiàn)在變?nèi)莨芙Y(jié)電容的大小隨溫度的升高而增加上。由式(3),(7)和(8)可知,溫度的變化只影響了VCO電壓頻率特性曲線的各點斜率的大小,并不改變系統(tǒng)的穩(wěn)定性和系統(tǒng)穩(wěn)態(tài)誤差的收斂性,只影響系統(tǒng)收斂的速度,對校正的效果并不產(chǎn)生實質(zhì)的影響。可見,PI閉環(huán)校正可以抑制溫度對頻率的影響。
6 系統(tǒng)實現(xiàn)
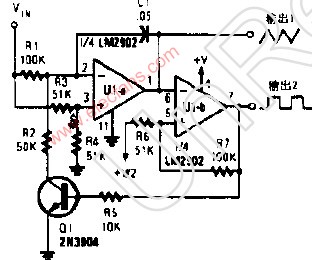
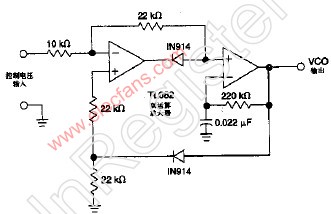
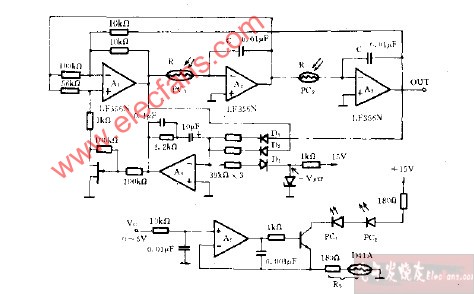
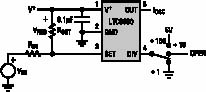
圖(5)是實現(xiàn)圖(3)所示系統(tǒng)的8051單片機系統(tǒng)框圖。
????????????????????????? 
本系統(tǒng)采用80C51單片機作控制器。控制電壓由D/A輸出,經(jīng)放大,驅(qū)動VCO。VCO輸出經(jīng)由二極管混頻網(wǎng)絡(luò)進行差頻,再經(jīng)濾波輸出正弦信號;整形電路整形成脈沖波,由計數(shù)器對其計數(shù)以測得輸出信號的頻率。80C51單片機的計數(shù)器T0工作在計數(shù)器模式,作為計數(shù)器的擴展;計數(shù)器T1工作在定時器模式,提供計數(shù)閘門時間。80C51單片機根據(jù)測得的實際系統(tǒng)輸出信號的頻率與理想模型輸出之差,由PI校正算法調(diào)整控制電壓的大小,構(gòu)成閉環(huán)反饋,以實現(xiàn)對理想輸出的無穩(wěn)態(tài)誤差的跟蹤。PI校正算法由單片機控制程序?qū)崿F(xiàn)。
7 結(jié)束語
本方案并不要求獲得VCO的精確模型,對建模誤差、元器件的分散性及元件老化引起的模型誤差有一定的魯棒性;通過軟件設(shè)計,能方便地實現(xiàn)系統(tǒng)自動調(diào)零、自動校準。筆者設(shè)計的信號源,采用上述方案,取得了理想的效果。
2 謝錫祺,楊位欽.自動控制理論基礎(chǔ).北京:北京理工大學(xué)出版社,1992
3 李華.MCS51系列單片機實用接口技術(shù).北京:北京航空航天大學(xué)出版社,1993
4 黃文梅,楊勇,熊桂林.系統(tǒng)分析與仿真.長沙:國防科技大學(xué)出版社,1999










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論