 電子發(fā)燒友App
電子發(fā)燒友App


可控硅具有功率大,效率高,體積小,重量輕,無(wú)噪音,控制靈敏等優(yōu)點(diǎn),而且還具有使用小電流,小功率來(lái)控制大電流大功率的特點(diǎn),其應(yīng)用范圍,前途都非常廣泛。用單片機(jī)實(shí)現(xiàn)可控硅過(guò)零調(diào)速,相比于變頻調(diào)速,不僅可使可控硅的導(dǎo)通角控制由軟件完成,觸發(fā)電路有結(jié)構(gòu)簡(jiǎn)單,控制靈活,精度可通過(guò)軟件補(bǔ)償,任意調(diào)節(jié)轉(zhuǎn)速等特點(diǎn),還可以避免類似移相調(diào)速,脈寬調(diào)速(PWM),正弦脈寬調(diào)速(SPWM)等在調(diào)速過(guò)程中產(chǎn)生大量噪聲和高次諧波,對(duì)電路器件耐壓值要求較高的。
1 可控硅過(guò)零檢測(cè)調(diào)速控制的方法
數(shù)字實(shí)現(xiàn)可控硅過(guò)零控制的示意圖如圖1。可以看出,過(guò)零調(diào)速通過(guò)的工作電壓是完整的正弦波形,過(guò)零導(dǎo)通且過(guò)零截止。調(diào)速時(shí)通過(guò)改變?cè)诮o定的時(shí)間內(nèi)改變加在負(fù)載上的交流正弦波個(gè)數(shù)來(lái)調(diào)節(jié)電機(jī)的轉(zhuǎn)速。由于可控硅是在電壓(電流)過(guò)零時(shí)觸發(fā)導(dǎo)通的,導(dǎo)通時(shí)的波形是完整的正弦波或半波,所以不存在可控硅移相調(diào)壓調(diào)速所存在的一些缺點(diǎn),如:產(chǎn)生大的射頻干擾,高次諧波等。這樣就解決了第一個(gè)問(wèn)題,同時(shí)也提高了電路器件的安全系數(shù)。
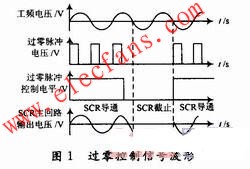
數(shù)字實(shí)現(xiàn)可控硅過(guò)零調(diào)速控制需要解決2個(gè)問(wèn)題:實(shí)現(xiàn)工頻電壓的正負(fù)過(guò)零檢測(cè),并在過(guò)零時(shí)產(chǎn)生脈沖信號(hào);過(guò)零脈沖信號(hào)必須受單片機(jī)輸出信息控制,從而控制可控硅過(guò)零觸發(fā)時(shí)間。
過(guò)零脈沖信號(hào)的個(gè)數(shù)和時(shí)間間隔可以通過(guò)軟硬件協(xié)調(diào)解決。直接控制導(dǎo)通脈沖個(gè)數(shù)和截止脈沖個(gè)數(shù)就可以了,調(diào)速范圍可以從零到最高速度(加入完整的工頻電壓時(shí)的速度)。設(shè)最高速度轉(zhuǎn)速為n0,導(dǎo)通脈沖個(gè)數(shù)為k,截止脈沖個(gè)數(shù)為s,速度為n,理論上:
n=(k/s)n0 (1)
實(shí)際工作中要根據(jù)驅(qū)動(dòng)負(fù)載設(shè)定轉(zhuǎn)速范圍。
2 硬件電路設(shè)計(jì)
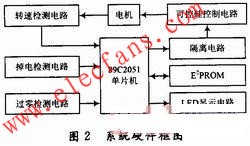
硬件電路設(shè)計(jì)框圖如圖2所示。單片機(jī)為控制器的核心部件,其主要工作是接收220 V交流電的過(guò)零信號(hào),根據(jù)過(guò)零檢測(cè)信號(hào)控制可控硅的導(dǎo)通時(shí)間;接收掉電檢測(cè)電路送來(lái)的掉電信號(hào);檢測(cè)電機(jī)轉(zhuǎn)速等級(jí)并在數(shù)碼管上顯示。
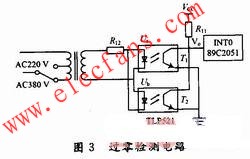
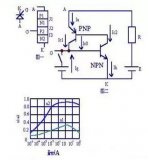
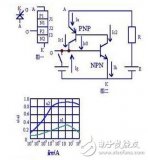
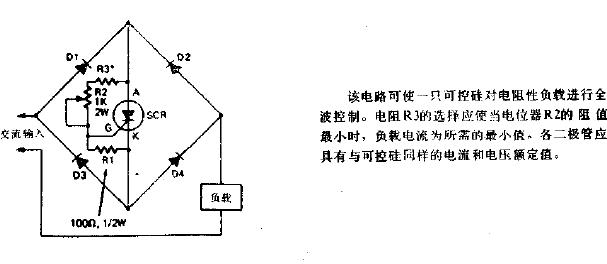
過(guò)零檢測(cè)電路的最終目標(biāo)是實(shí)現(xiàn)當(dāng)交流電壓通過(guò)零點(diǎn)時(shí)取出其脈沖。其工作過(guò)程為:當(dāng)通過(guò)正半周較高電壓時(shí),光電管D1,T1導(dǎo)通Vo為低電平,當(dāng)正半周電壓反向接近零點(diǎn)時(shí)D1達(dá)不到導(dǎo)通電壓的值而截止,從而使T1截止Vo為高電平;同樣當(dāng)通過(guò)負(fù)半周較高電壓時(shí),光電管D2,T2導(dǎo)通Vo為低電平,當(dāng)負(fù)半周電壓正向接近零點(diǎn)時(shí)D2達(dá)不到導(dǎo)通電壓的值而截止,從而使T2截止Vo為高電平。通過(guò)這個(gè)正負(fù)交越零點(diǎn)時(shí)的正脈沖信號(hào)向單片機(jī)89C2051發(fā)出外部中斷 INT0,單片機(jī)根據(jù)該信號(hào),經(jīng)過(guò)一定的延時(shí)后控制可控硅導(dǎo)通。其電路如圖3所示。
掉電檢測(cè)電路是當(dāng)整流后的電源電壓小于某一值時(shí),認(rèn)為電源被關(guān)閉,此時(shí)產(chǎn)生掉電信號(hào),該信號(hào)作為單片機(jī)外部中斷信號(hào)INT1,使單片機(jī)進(jìn)入掉電保護(hù)程序。
數(shù)碼顯示電路是用數(shù)碼管將存儲(chǔ)在EEPROM中的電機(jī)轉(zhuǎn)速用數(shù)字顯示出來(lái),可以顯示電機(jī)的轉(zhuǎn)速等級(jí)。
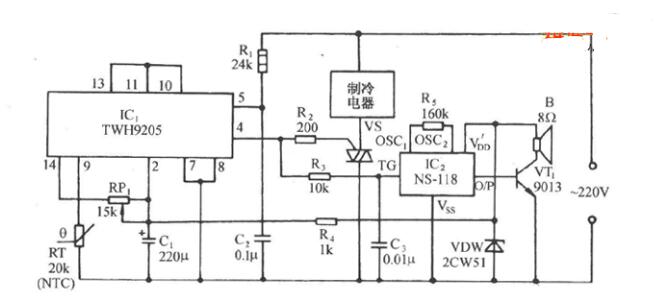
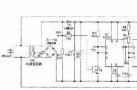
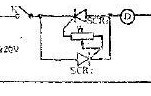
導(dǎo)通控制電路通過(guò)帶光隔離的雙向可控硅驅(qū)動(dòng)器MOC3052驅(qū)動(dòng)可控硅,實(shí)現(xiàn)單片機(jī)對(duì)控硅的導(dǎo)通控制,從而達(dá)到轉(zhuǎn)速控制的目的。可控硅觸發(fā)電路如圖4所示。

3 軟件設(shè)計(jì)要點(diǎn)
采用雙向可控硅過(guò)零觸發(fā)方式,由單片機(jī)控制雙向可控硅的通斷,通過(guò)改變每個(gè)控制周期內(nèi)可控硅導(dǎo)通和關(guān)斷交流完整全波(或半波)信號(hào)的個(gè)數(shù)來(lái)調(diào)節(jié)負(fù)載功率,進(jìn)而達(dá)到調(diào)速的目的。由于INT0信號(hào)反映工頻電壓過(guò)零時(shí)刻,因此只要在外中斷O的中斷服務(wù)程序中完成控制門(mén)的開(kāi)啟與關(guān)閉,并利用中斷服務(wù)次數(shù)對(duì)控制量 N(在每個(gè)控制周期內(nèi)可控硅導(dǎo)通的正弦波個(gè)數(shù))進(jìn)行計(jì)數(shù)和判斷,即每中斷1次,對(duì)N進(jìn)行減1計(jì)數(shù)。如N≠0,保持控制電平為“1”,繼續(xù)打開(kāi)控制門(mén);如 N=O,則使控制電平復(fù)位為“0”,關(guān)閉控制門(mén),使可控硅過(guò)零觸發(fā)脈沖不再通過(guò)。這樣就可以按照控制處理得到的控制量的要求,實(shí)現(xiàn)可控硅的過(guò)零控制,從而達(dá)到按控制量控制的效果,實(shí)現(xiàn)速度可調(diào)。
4 結(jié)語(yǔ)
在實(shí)驗(yàn)室試驗(yàn)調(diào)試過(guò)程中,對(duì)直流電機(jī)的調(diào)速顯得較穩(wěn)定,調(diào)速范圍也很寬;但對(duì)交流電機(jī)的調(diào)速過(guò)程中,中高速段調(diào)速較平穩(wěn);在低速段調(diào)速時(shí)電機(jī)存在抖動(dòng)現(xiàn)象,并且速度越低,抖動(dòng)越嚴(yán)重,這也是本設(shè)計(jì)中要解決的后續(xù)問(wèn)題。

















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論