當(dāng)涉及到控制系統(tǒng)中的精確調(diào)節(jié)和穩(wěn)定性,PID(比例-積分-微分)控制算法是一種不可或缺的工具。本文將簡(jiǎn)單介紹 PID 控制算法,從基本概念到具體實(shí)現(xiàn),一起了解如何使用 PID 控制算法來(lái)優(yōu)化控制系統(tǒng)。
2023-08-29 16:39:04 429
429 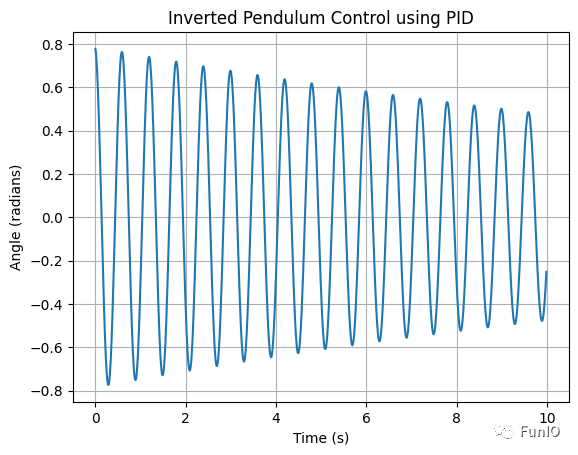
控制系統(tǒng)的穩(wěn)定性
2013-04-10 20:59:20
倒立擺作為一種典型的控制系統(tǒng)實(shí)驗(yàn)裝置,具有非線性、自然不穩(wěn)定等特性,常用來(lái)作為檢驗(yàn)?zāi)撤N控制理論或方法是否合理的典型方案。一階倒立擺系統(tǒng)能用多種理論和方法來(lái)實(shí)現(xiàn)其穩(wěn)定控制,如PID、自適應(yīng)、狀態(tài)反饋、模糊控制及人工神經(jīng)元網(wǎng)絡(luò)等多種理論和方法都能在倒立擺系統(tǒng)控制上得到實(shí)現(xiàn)。
2022-02-10 11:46:56 3
3 建立直線一級(jí)倒立擺的仿真模型如圖3所示。“GLlIPState—Space”為直線一級(jí)倒立擺的狀態(tài)空間模型。雙擊圖3中的“Poles Control”模塊,打開(kāi)圖4中的設(shè)置窗口。
2020-05-03 18:11:005971 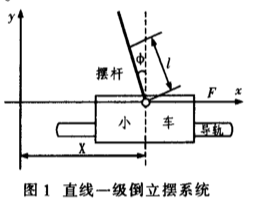
系統(tǒng)控制上得到實(shí)現(xiàn),而且當(dāng)一種新的控制理論和方法提出以后,在不能用理論加以嚴(yán)格證明時(shí),可以考慮通過(guò)倒立擺裝置來(lái)驗(yàn)證其正確性和實(shí)用性。本文設(shè)計(jì)了基于單片機(jī)的得倒立擺控制系統(tǒng),成本低廉,調(diào)試方便,能直觀的觀察控制效果,完成系統(tǒng)的調(diào)試任務(wù),快捷的驗(yàn)證控制理論算法的正確與否。
2020-05-03 10:29:001088 
自動(dòng)起擺控制器Swing-up Controller能夠控制直線一級(jí)倒立擺由靜止下垂的穩(wěn)定平衡狀態(tài)自動(dòng)轉(zhuǎn)化到豎直向上的不穩(wěn)定平衡狀態(tài),而無(wú)需給擺桿施加力的作用,就可以實(shí)現(xiàn)擺桿的自動(dòng)擺起。
2019-08-23 08:05:007308 
電子穩(wěn)定性控制系統(tǒng)(Electronic Stability Program,簡(jiǎn)稱ESP),它是一種先進(jìn)的電腦控制系統(tǒng),輔助駕駛者控制車輛的主動(dòng)安全技術(shù),可幫助駕駛員在惡劣行駛條件下提高車輛的車身穩(wěn)定性。
2019-06-24 11:52:01947 本文檔的主要內(nèi)容詳細(xì)介紹的是自動(dòng)控制系統(tǒng)控制工程教程之穩(wěn)定性分析的課程資料免費(fèi)下載。
2018-11-22 08:00:009 ESP是英文 Electronic Stability Program的縮寫,其中文含義為電子穩(wěn)定程序我們一般稱為穩(wěn)定性控制系統(tǒng),它是基于ABS系統(tǒng)基礎(chǔ)上設(shè)計(jì)的一種綜合性主動(dòng)安全系統(tǒng)。 穩(wěn)定性系統(tǒng)由眾多部件組成,通過(guò)以下幾個(gè)方面介紹系統(tǒng)的結(jié)構(gòu)組成:傳感元件、液壓?jiǎn)卧?b style="color: red">控制模塊。
2018-05-26 10:30:0011811 針對(duì)存在模型參數(shù)不確定性和外部擾動(dòng)的直線型二級(jí)倒立擺系統(tǒng)的穩(wěn)擺控制問(wèn)題,對(duì)如何實(shí)現(xiàn)倒立擺系統(tǒng)魯棒穩(wěn)定的同時(shí),還保證其達(dá)到期望的最優(yōu)控制性能和H性能指標(biāo)的穩(wěn)定性控制問(wèn)題進(jìn)行了研究。基于狀態(tài)反饋
2018-03-06 14:11:581 倒立擺控制系統(tǒng)是一個(gè)復(fù)雜的、不穩(wěn)定的、非線性系統(tǒng),是控制理論發(fā)展中的一個(gè)典型問(wèn)題。目前,通過(guò)倒立擺系統(tǒng)驗(yàn)證過(guò)的許多控制方法在航天、機(jī)器人以及一般工業(yè)過(guò)程領(lǐng)域均有著廣泛的應(yīng)用。如航天飛機(jī)的姿態(tài)控制
2018-02-04 11:25:280 倒立擺PID算法源代碼參考
2018-01-09 17:02:0720 魯棒性和穩(wěn)定性都是反應(yīng)控制系統(tǒng)抗干擾能力的參數(shù)。那么關(guān)于魯棒性和穩(wěn)定性的區(qū)別有哪些,我們先來(lái)看看兩者的定義。 定義上 所謂魯棒性,是指控制系統(tǒng)在一定(結(jié)構(gòu),大小)的參數(shù)攝動(dòng)下,維持其它某些性能的特性
2017-11-29 09:39:44242390 倒立擺控制系統(tǒng)(InvertedPendulumSystem簡(jiǎn)稱IPS)是一個(gè)復(fù)雜的、不穩(wěn)定的、非線性系統(tǒng),是進(jìn)行控制理論教學(xué)及開(kāi)展各種控制實(shí)驗(yàn)的理想實(shí)驗(yàn)平臺(tái)。對(duì)倒立擺系統(tǒng)的研究能有效的反映控制中
2017-11-27 16:36:0253705 倒立擺是典型的重上支下的系統(tǒng),具有多個(gè)特點(diǎn),包括不穩(wěn)定性、快速多變性、耦合性等,其系統(tǒng)成本低廉、結(jié)構(gòu)簡(jiǎn)單、便于進(jìn)行實(shí)驗(yàn)室操作。而且倒立擺具有多種功能,能對(duì)控制系統(tǒng)進(jìn)行檢驗(yàn)、對(duì)機(jī)器人的行走和火箭發(fā)射等
2017-11-09 14:50:5623 通過(guò)對(duì)一階旋轉(zhuǎn)倒立擺系統(tǒng)原理的分析,選用單片機(jī)作為控制器,直流電機(jī)作為執(zhí)行器,電位器式角度傳感器作為反饋環(huán)節(jié),采用PID控制算法設(shè)計(jì)實(shí)現(xiàn)了一階旋轉(zhuǎn)倒立擺控制系統(tǒng)。實(shí)驗(yàn)結(jié)果表明該系統(tǒng)在穩(wěn)定的基礎(chǔ)上具有
2017-10-19 15:21:0957 基于變量分組模糊控制算法的倒立擺系統(tǒng)_魏勝男
2017-03-16 08:00:000 一類T_S模糊控制系統(tǒng)的穩(wěn)定性分析及設(shè)計(jì)_陳國(guó)洋
2017-02-07 18:22:060 模糊趨近律滑模變結(jié)構(gòu)的二級(jí)倒立擺系統(tǒng)控制仿真_張志強(qiáng)
2017-01-30 23:17:311 現(xiàn)代控制理論-5.系統(tǒng)的穩(wěn)定性
2016-12-13 22:20:481 一級(jí)倒立擺的PID控制設(shè)計(jì)
2016-11-08 18:51:1664 本文介紹了一種簡(jiǎn)易環(huán)形倒立擺控制系統(tǒng)的設(shè)計(jì)實(shí)現(xiàn)
2016-08-23 16:27:2420 為進(jìn)行性線控制器的設(shè)計(jì)首先需要對(duì)被控制系統(tǒng)進(jìn)行建模.二級(jí)倒立擺系統(tǒng)數(shù)學(xué)模型的建立
2016-06-14 15:29:5616 時(shí)變隨機(jī)系統(tǒng)——穩(wěn)定性、估計(jì)與控制,下來(lái)看看。
2016-04-12 11:55:5019 倒立擺控制系統(tǒng)是一個(gè)復(fù)雜的、不穩(wěn)定的、非線性系統(tǒng),是進(jìn)行控制理論教學(xué)及開(kāi)展各種控制實(shí)驗(yàn)的理想實(shí)驗(yàn)平臺(tái)。對(duì)倒立擺系統(tǒng)的研究能有效的反映控制中的許多典型問(wèn)題:如非線性問(wèn)題、魯棒性問(wèn)題、鎮(zhèn)定問(wèn)題、隨動(dòng)問(wèn)
2015-12-11 11:06:5214 基于MATLAB的模糊控制倒立擺系統(tǒng)研究,感興趣的可以下載看看。
2015-11-03 13:49:5836 倒立擺系統(tǒng)是一種典型的控制系統(tǒng)模型,能夠?qū)?shí)際與理論相結(jié)合,可以開(kāi)發(fā)出新的控制算法來(lái)應(yīng)用在系統(tǒng)模型之上。采用模糊控制算法研究二級(jí)倒立擺系統(tǒng)的控制問(wèn)題,設(shè)計(jì)模糊控制
2012-08-29 15:04:08111 利用stm32控制平板倒立擺使用了紅外遙控,pwm控制,串口調(diào)試角加速度傳感器,里面就是代碼。
2012-07-24 17:39:33209 本文建立一級(jí)倒立擺的數(shù)學(xué)模型,闡述了變速積分的PID優(yōu)點(diǎn),對(duì)一級(jí)倒立擺的變速積分的PID控制進(jìn)行仿真,對(duì)比傳統(tǒng)PID控制有明顯的性能改進(jìn)。
2012-02-03 17:14:5073 為實(shí)現(xiàn)二級(jí)倒立擺系統(tǒng)的實(shí)時(shí)穩(wěn)定控制,以深圳固高直線二級(jí)倒立擺裝置作為控制對(duì)象,在MATLAB環(huán)境下,利用基于二次型最優(yōu)控制理論的線性二次型(Linear Quadratic Regulator,LQR)最優(yōu)控制器
2012-01-18 15:07:3053 為了實(shí)現(xiàn)一級(jí)倒:芷擺系統(tǒng)自擺起和穩(wěn)定控制,該文采用了最優(yōu)控制與PID控制相結(jié)合的控制方法。首先,采用BangBang控制理論設(shè)計(jì)開(kāi)環(huán)時(shí)間最優(yōu)控制器,實(shí)現(xiàn)倒立擺的平穩(wěn)快速擺起,同
2012-01-18 15:00:3491 基于虛擬儀器 LabVIEW 平臺(tái)組建了車輛穩(wěn)定性控制(VSC)硬件在環(huán)系統(tǒng)。采用滑模變結(jié)構(gòu)控制算法設(shè)計(jì)了汽車穩(wěn)定性控制策略;采用LabVIEW 圖形化程序設(shè)計(jì)VSC控制程序,并以ARM7 嵌入式系統(tǒng)開(kāi)發(fā)
2011-07-27 16:45:1567 倒立擺 系統(tǒng)是一個(gè)復(fù)雜的非線性系統(tǒng)本文建立了倒立擺的一種非線性數(shù)學(xué)模型在分析的基礎(chǔ)上為倒立擺系統(tǒng)設(shè)計(jì)了一種模糊控制方案我們對(duì)一級(jí)倒立擺系統(tǒng)進(jìn)行了控制取得了較好的效果
2011-07-06 18:19:4856 倒立擺 系統(tǒng)是一個(gè)復(fù)雜的!非線性的!不穩(wěn)定的高階系統(tǒng) 倒立擺的控制一直是控制理論及應(yīng)用的典型課題分析了如何利用拉格朗日方程對(duì)直線柔性連接兩級(jí)倒立擺系統(tǒng)建模采用法設(shè)計(jì)最優(yōu)
2011-07-06 18:17:2242 在 智能控制 系統(tǒng)分層遞階結(jié)構(gòu)的基礎(chǔ)上,結(jié)合倒立擺的特點(diǎn),根據(jù)被控對(duì)象的不同情況,分別采用了不同的看法,提出了基于分層遞階智能控制的倒立擺研究
2011-07-06 18:07:3625 在對(duì) 二級(jí)倒立擺 系統(tǒng)的動(dòng)力學(xué)方程進(jìn)行建模的基礎(chǔ)上將其轉(zhuǎn)化為線性定常系統(tǒng)的狀態(tài)控制問(wèn)題,提出了基于matlab的二級(jí)倒立擺控制系統(tǒng)
2011-07-06 18:05:25111 針對(duì) 倒立擺 的起擺控制建立了環(huán)形單級(jí)倒立擺基于拉格朗日方程的運(yùn)動(dòng)方程,在此基礎(chǔ)上提出了能量控制的概念,并將能量補(bǔ)償控制應(yīng)用在環(huán)形單級(jí)倒立擺系統(tǒng)上,仿真和實(shí)際控制結(jié)果表
2011-07-06 18:03:4967 闡述了 倒立擺 實(shí)驗(yàn)系統(tǒng)及其在自動(dòng)控制領(lǐng)域中的應(yīng)用
2011-07-06 18:02:0353 本文詳細(xì)地闡述了 倒立擺 系統(tǒng)及其在自動(dòng)控制領(lǐng)域中的應(yīng)用
2011-07-06 18:00:2257 對(duì)一維 倒立擺 系統(tǒng)的穩(wěn)定和起擺進(jìn)行了深入研究。通過(guò)$% 理論對(duì)系統(tǒng)進(jìn)行坐標(biāo)和輸入量的變換,實(shí)現(xiàn)了系統(tǒng)的局部線性化,使得倒立擺系統(tǒng)的穩(wěn)定控制不再需要對(duì)數(shù)學(xué)模型中的非線性
2011-07-06 17:59:0041 針對(duì)跟隨控制系統(tǒng)和領(lǐng)導(dǎo)者智能體隊(duì)形控制系統(tǒng)相似的特點(diǎn),通過(guò)輸入-狀態(tài)穩(wěn)定性(Input-to-StateStability ISS)分析了跟隨控制系統(tǒng)的穩(wěn)定性,驗(yàn)證系統(tǒng)控制器的性能。跟隨控制系統(tǒng)由主動(dòng)
2011-05-12 17:11:5428 固高科技的環(huán)形倒立擺系列產(chǎn)品采用開(kāi)放的控制解決方案和模塊化的實(shí)驗(yàn)平臺(tái),以旋轉(zhuǎn)運(yùn)動(dòng)模塊為基礎(chǔ)平臺(tái),輕松構(gòu)建環(huán)型一級(jí)倒立擺,環(huán)形串聯(lián)兩級(jí)倒立擺、環(huán)形并聯(lián)兩級(jí)倒立擺,甚至
2011-04-05 22:30:30136 研究了具有隨機(jī)網(wǎng)絡(luò)誘導(dǎo)時(shí)延及數(shù)據(jù)包丟失的網(wǎng)絡(luò)控制系統(tǒng)隨機(jī)穩(wěn)定性問(wèn)題.本文用一個(gè)具有兩個(gè)狀態(tài)的馬爾可夫鏈來(lái)描述數(shù)據(jù)通過(guò)網(wǎng)絡(luò)傳輸時(shí)隨機(jī)數(shù)據(jù)包丟失過(guò)程,利用馬爾可夫跳變線
2011-03-28 22:01:5124 倒立擺系統(tǒng)是多變量、非線性、強(qiáng)耦合的控制系統(tǒng)。采用模糊控制理論研究二級(jí)倒立擺控制問(wèn)題。運(yùn)用最優(yōu)控制方法設(shè)計(jì)融合函數(shù)以降低模糊控制器的維數(shù),減少模糊控制規(guī)則數(shù),
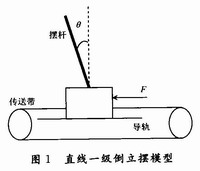
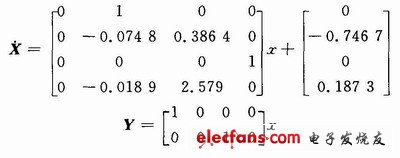
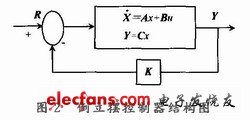
2010-12-29 17:29:0846 針對(duì)多輸入多輸出的倒立擺系統(tǒng)平衡控制,利用牛頓-歐拉方法建立了直線型一級(jí)倒立擺系統(tǒng)的數(shù)學(xué)模型。在分析的基礎(chǔ)上,采用狀態(tài)反饋控制中極點(diǎn)配置法設(shè)計(jì)了用于直線型一級(jí)
2010-12-17 16:28:0254 概述
倒立擺控制系統(tǒng)是一個(gè)復(fù)雜的、不穩(wěn)定的、非線性系統(tǒng),是進(jìn)行控制理論教學(xué)及開(kāi)展各種控制實(shí)驗(yàn)的理想實(shí)驗(yàn)平臺(tái)。對(duì)倒立擺系統(tǒng)的研究能有效的反映控制中
2010-08-05 15:26:581333 倒立擺是控制領(lǐng)域中典型的被控對(duì)象。本文通過(guò)智能控制算法實(shí)現(xiàn)倒立擺的起擺控制。當(dāng)擺桿的角度進(jìn)入穩(wěn)定區(qū)域時(shí),通過(guò)PID控制算法使擺桿穩(wěn)定。整個(gè)控制過(guò)程由基于DSP(Digital Sig
2010-08-05 15:24:5728 電子穩(wěn)定性控制系統(tǒng)ESC解決方案
電子穩(wěn)定性控制系統(tǒng)(ESC)幫助駕駛員保持對(duì)于汽車的控制。通過(guò)采用一個(gè)微控制器,一套用于測(cè)量汽車輛橫向和縱向加速度
2010-04-12 15:22:544958 
什么是車輛穩(wěn)定性控制系統(tǒng)(VSC)
這個(gè)系統(tǒng)是以ABS為基礎(chǔ)發(fā)展而成的。系統(tǒng)主要在大側(cè)向加速度,大側(cè)偏角的極限工況下工作
2010-03-12 09:29:341561 介紹了一次調(diào)頻參數(shù)的設(shè)置方法及對(duì)協(xié)調(diào)控制系統(tǒng)穩(wěn)定性的影響,并且對(duì)如何在發(fā)揮一次調(diào)頻作用的同時(shí)減少對(duì)協(xié)調(diào)控制系統(tǒng)穩(wěn)定性的影響提出了建議,提出了將DEH一次調(diào)頻因子
2010-02-02 13:51:2218 二級(jí)倒立擺的模糊控制研究
1 引言
在控制理論發(fā)展的過(guò)程中,某一理論的正確性及實(shí)際應(yīng)用中的可行性都需要一個(gè)按其理論設(shè)計(jì)的控制器控制一個(gè)
2009-12-23 09:53:182097 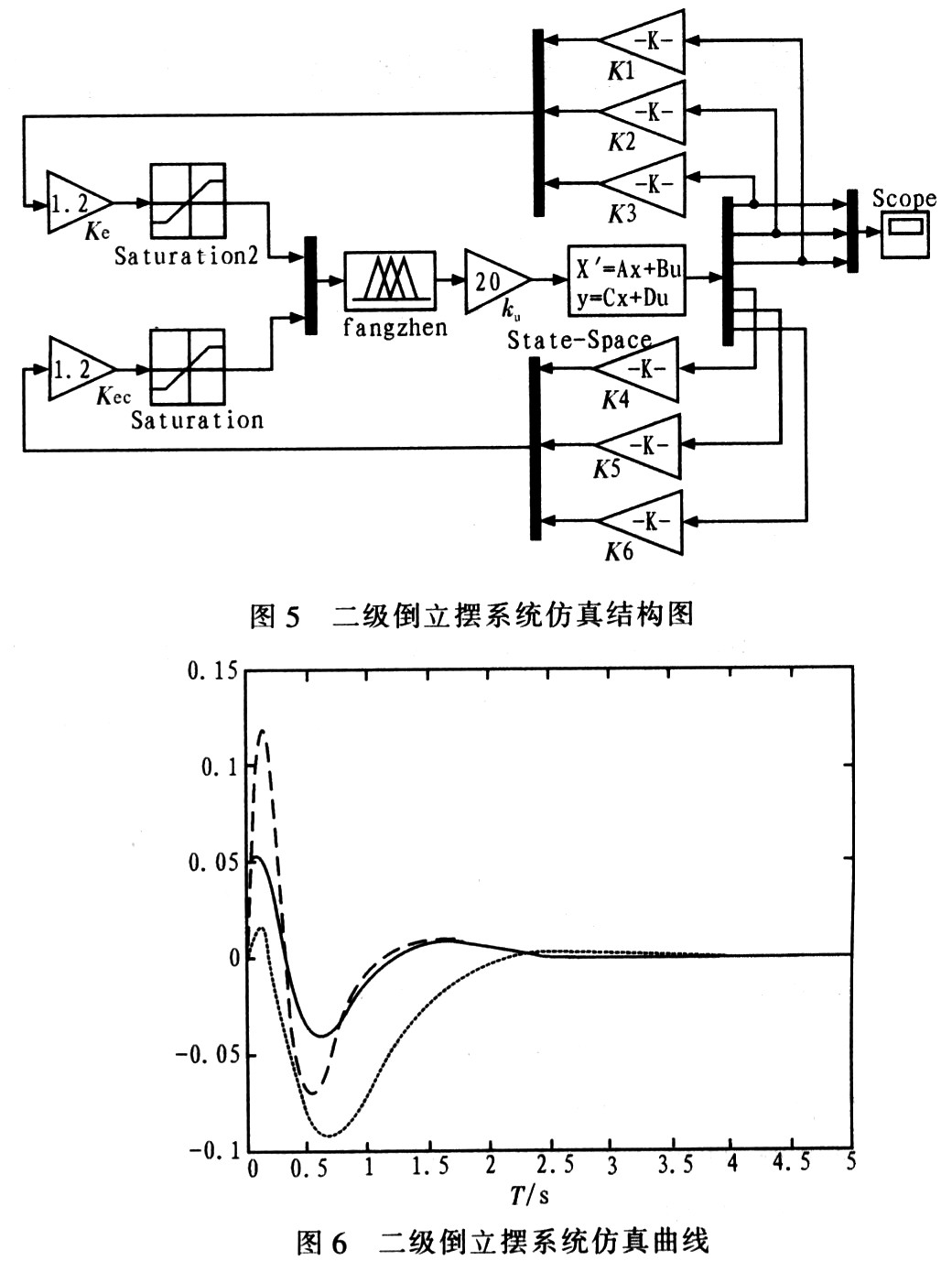
利用Lagrange 方程建立了系統(tǒng)的動(dòng)力學(xué)方程,對(duì)n 級(jí)倒立擺系統(tǒng)的建模問(wèn)題進(jìn)行了具體研究,經(jīng)過(guò)嚴(yán)密的數(shù)學(xué)推導(dǎo),給出了n 級(jí)倒立擺系統(tǒng)建模的基本過(guò)程,獲得了一組可普遍性地描
2009-12-14 13:55:4916 直接能量平衡法協(xié)調(diào)控制系統(tǒng)穩(wěn)定性對(duì)策研究:為了解決直接能量平衡法協(xié)調(diào)控制系統(tǒng)動(dòng)態(tài)和穩(wěn)態(tài)下的穩(wěn)定性問(wèn)題,通過(guò)對(duì)某大型單元機(jī)組自動(dòng)控制系統(tǒng)的優(yōu)化工作,大幅度提
2009-10-10 15:29:3312 倒立擺控制系統(tǒng)是一個(gè)典型的高階次、不穩(wěn)定、多變量、非線性和強(qiáng)藕合控制系統(tǒng)。本文研究分析了單節(jié)倒立擺控制系統(tǒng)的數(shù)學(xué)模型,介紹了線性二次型最優(yōu)調(diào)節(jié)器(LQR)的基本原
2009-09-02 16:38:2724 提出了利用TS-PID 對(duì)單級(jí)小車倒立擺進(jìn)行控制的方法,并且對(duì)TS-PID 控制器進(jìn)行了簡(jiǎn)要的理論分析,最后利用matlab 的simulink 工具對(duì)該控制系統(tǒng)進(jìn)行了仿真,其結(jié)果表明該控制方法可行
2009-08-31 08:20:2720 選用 LabVIEW 作為倒立擺控制系統(tǒng)的界面設(shè)計(jì)開(kāi)發(fā)工具。為了在LabVIEW 圖形化編程環(huán)境下使用倒立擺控制器Windows 環(huán)境下的動(dòng)態(tài)鏈接庫(kù),本文將動(dòng)態(tài)鏈接庫(kù)中的函數(shù)全部轉(zhuǎn)換設(shè)計(jì)為在LabV
2009-08-26 09:40:3527 本文針對(duì)LQR 控制在單級(jí)倒立擺控制中的不足,設(shè)計(jì)了一個(gè)LQR 結(jié)合PID 的復(fù)合控制。并在Borland c 語(yǔ)言環(huán)境下編寫控制程序,成功實(shí)現(xiàn)倒立擺的控制,其控制效果比單一LQR控制的抗擾
2009-08-15 10:54:1621 倒立擺控制系統(tǒng)是一個(gè)典型的高階次、不穩(wěn)定、多變量、非線性和強(qiáng)藕合控制系統(tǒng)。本文研究對(duì)象是基于研華公司數(shù)據(jù)采集卡PCI—1710—B 的倒立擺控制系統(tǒng)。通過(guò)對(duì)一級(jí)倒立擺系統(tǒng)
2009-08-15 08:13:4525 為保證閉環(huán)系統(tǒng)的全局漸進(jìn)穩(wěn)定性,系統(tǒng)的時(shí)延必須是有界的。本文中討論了具有網(wǎng)絡(luò)誘導(dǎo)時(shí)延的網(wǎng)絡(luò)控制系統(tǒng)的模型,同時(shí)給出了最大允許傳輸間隔以及一個(gè)實(shí)際例子。實(shí)踐證
2009-08-13 11:39:5417 為保證閉環(huán)系統(tǒng)的全局漸進(jìn)穩(wěn)定性,系統(tǒng)的時(shí)延必須是有界的。本文中討論了具有網(wǎng)絡(luò)誘導(dǎo)時(shí)延的網(wǎng)絡(luò)控制系統(tǒng)的模型,同時(shí)給出了最大允許傳輸間隔以及一個(gè)實(shí)際例子。實(shí)踐證
2009-08-13 11:38:5112 針對(duì)倒立擺的非線性采用T-S模糊控制的方法對(duì)倒立擺進(jìn)行控制,建立了倒立擺的數(shù)學(xué)模型,并用Matlab 進(jìn)行了仿真,仿真結(jié)果表明該控制方法對(duì)倒立擺具有好的控制效果。關(guān)鍵
2009-08-10 09:39:3215 本文介紹了一種基于SPCE061A 單片機(jī)的二級(jí)倒立擺控制系統(tǒng)。主要闡述了狀態(tài)空間法在本系統(tǒng)中的應(yīng)用以及功能設(shè)計(jì),并簡(jiǎn)要介紹了系統(tǒng)的軟件設(shè)計(jì)思路。關(guān)鍵詞:?jiǎn)纹瑱C(jī); 狀
2009-08-04 08:42:0925 控制系統(tǒng)的時(shí)域分析法--線性系統(tǒng)的穩(wěn)定性
2009-07-27 14:17:512410 
找出PLC控制系統(tǒng)的干擾源, 以西門子S7為例,從應(yīng)用的角度提出了PLC控制穩(wěn)定性的方法。PLC是80年代發(fā)展起來(lái)的新一代工業(yè)控制裝置! 它是集自動(dòng)控制" 計(jì)算機(jī)和通信技術(shù)于一體的產(chǎn)
2009-07-01 17:19:3837 本文簡(jiǎn)要說(shuō)明了二級(jí)倒立擺系統(tǒng)及其建模,并分析了這個(gè)系統(tǒng)的特點(diǎn)。著重于建立一個(gè)單片機(jī)系統(tǒng),在狀態(tài)反饋的基礎(chǔ)上實(shí)現(xiàn)對(duì)倒立擺的控制。關(guān)鍵詞:倒立擺 單片機(jī) 狀態(tài)反饋
2009-06-26 10:32:1349 針對(duì)單級(jí)倒立擺系統(tǒng)的單輸入雙輸出、強(qiáng)非線性、強(qiáng)耦合的不穩(wěn)定系統(tǒng),提出了雙回路PID 控制方案。通過(guò)仿真試驗(yàn)研究了雙回路PID 多種組合控制方案的可行性,并選出最佳方案——
2009-06-17 09:34:2833 本文以倒立擺控制系統(tǒng)控制為例,介紹Borland C++ Builder 在數(shù)據(jù)采集、處理中的應(yīng)用,并根據(jù)系統(tǒng)控制算法控制電機(jī)左右運(yùn)動(dòng),從而保證倒立擺能穩(wěn)定地站立在豎直位置。關(guān)鍵詞: C
2009-06-15 09:26:3127 倒立擺是非線性、不穩(wěn)定的系統(tǒng)。本文使用單神經(jīng)元PID 控制算法,設(shè)計(jì)出基于小車位移和擺桿擺角兩個(gè)回路的單神經(jīng)元PID 控制器,并與傳統(tǒng)的PD 控制策略相比較,驗(yàn)證了其有效
2009-06-11 16:39:4023 在化工裝置中,加熱爐的運(yùn)行穩(wěn)定性在控制系統(tǒng)從繼電器系統(tǒng)升級(jí)到PLC 系統(tǒng)后,已經(jīng)大大提高。對(duì)控制系統(tǒng)中硬件設(shè)備及軟件結(jié)構(gòu)作進(jìn)一步改進(jìn),繼續(xù)提高加熱爐穩(wěn)定性。以某聚
2009-06-03 08:48:0621 本文通過(guò)拉格朗日方程推導(dǎo)出環(huán)形一級(jí)倒立擺系統(tǒng)的數(shù)學(xué)模型,用能量方法對(duì)該模型進(jìn)行擺起控制;在倒立擺成功擺起后,在倒立平衡點(diǎn)對(duì)系統(tǒng)模型進(jìn)行線性化,并用線性二次型
2009-05-25 15:07:0220 引言
倒立擺系統(tǒng)在控制理論研究中是一種較為理想的實(shí)驗(yàn)裝置。倒立擺系統(tǒng)可以用多種理論和方法來(lái)實(shí)現(xiàn)其穩(wěn)定控制,如PID、自適應(yīng)、狀態(tài)反饋、智
2009-01-01 21:05:33672 
控制系統(tǒng)時(shí)域仿真和穩(wěn)定性研究
凡是能用二階微分方程描述的控制系統(tǒng),都稱為二階控制系統(tǒng)。典型二階控制系統(tǒng)的閉環(huán)傳遞函數(shù)
2008-10-16 23:53:481683
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論