 電子發(fā)燒友App
電子發(fā)燒友App


?
目前,國(guó)外的恒壓供水工程設(shè)計(jì)都采用一臺(tái)變頻器只帶一臺(tái)水泵機(jī)組的方式,幾乎沒(méi)有用一臺(tái)變頻器拖動(dòng)多臺(tái)水泵機(jī)組運(yùn)行的情況,這種方式不但投資成本較高,且功能單一。
為此設(shè)計(jì)了在變頻調(diào)速控制系統(tǒng)中加入基于C8051F410的單片機(jī)系統(tǒng),構(gòu)成了功能更強(qiáng)的復(fù)合控制系統(tǒng),它不但克服了以上缺點(diǎn),而且具有安裝調(diào)試方便,功能全面,可靠性高。抗干擾能力強(qiáng)等優(yōu)點(diǎn),且可以廣泛應(yīng)用于工業(yè)生產(chǎn)、社會(huì)生活的各個(gè)領(lǐng)域。
1 控制原理
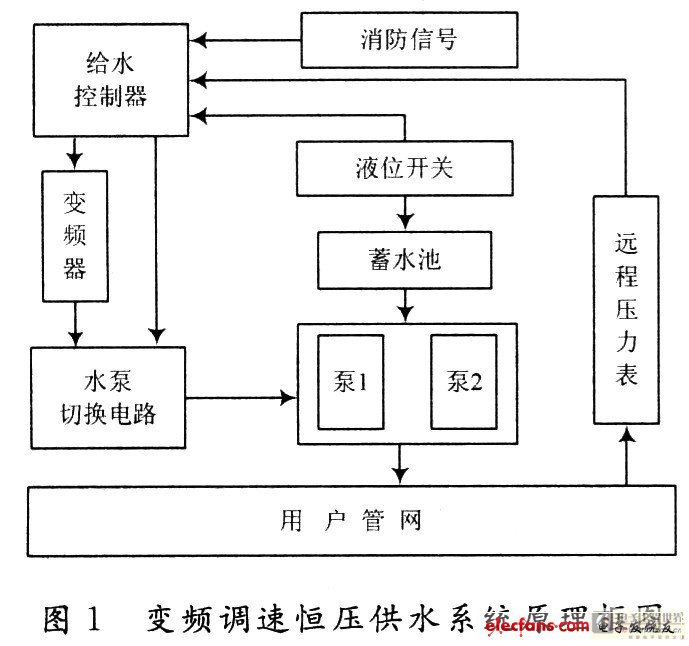
在恒壓供水系統(tǒng)中,安裝于管網(wǎng)的遠(yuǎn)傳壓力表提供水壓力信號(hào),并經(jīng)過(guò)光電隔離和電壓轉(zhuǎn)換電路,傳送給系統(tǒng)的中心控制器,控制器將采集到的壓力數(shù)據(jù)與預(yù)設(shè)壓力進(jìn)行比較,得出偏差值,再經(jīng)PID運(yùn)算之后得出控制參數(shù),D/A模塊將控制參數(shù)轉(zhuǎn)換為模擬電壓輸出,調(diào)節(jié)變頻器的輸出頻率,從而控制水泵的轉(zhuǎn)速,以保證管網(wǎng)壓力基本恒定。當(dāng)用水量增大時(shí),管網(wǎng)壓力低于預(yù)設(shè)值,變頻器頻率就會(huì)升高,水泵轉(zhuǎn)速加快,從而提升管道水壓,但若達(dá)到水泵額定輸出功率仍無(wú)法滿足用戶供水要求時(shí),該泵自動(dòng)轉(zhuǎn)換成工頻運(yùn)行狀態(tài),并變頻啟動(dòng)下一臺(tái)水泵;反之,當(dāng)用水量減少,則降低水泵運(yùn)行頻率直至設(shè)定的下限運(yùn)行頻率,若供水量仍大于用水量,則減泵直至全部泵停止工作,經(jīng)過(guò)一定的延時(shí),控制器重新比較壓力,并計(jì)算控制輸出,從而維持恒壓供水。它的系統(tǒng)原理框圖如圖1所示。
?
該系統(tǒng)可以同時(shí)控制2臺(tái)水泵,根據(jù)不同的場(chǎng)合可以采用不同的運(yùn)行模式,如單泵運(yùn)行、一用一補(bǔ)、一工一變、定時(shí)換泵等。
2 系統(tǒng)總體方案
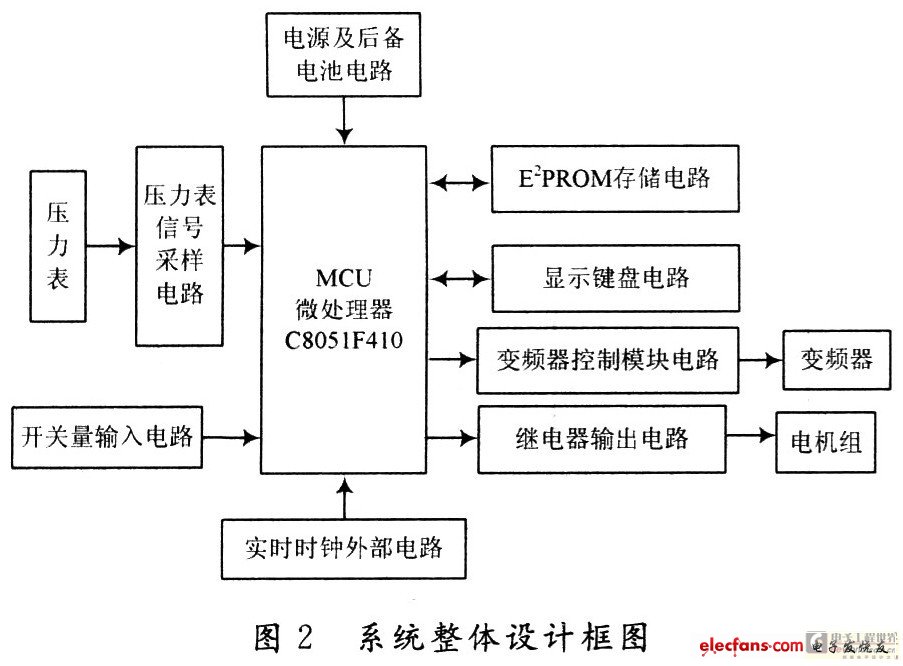
系統(tǒng)的硬件和軟件采用模塊化、標(biāo)準(zhǔn)化設(shè)計(jì),并充分考慮系統(tǒng)的擴(kuò)展能力。控制器由主控板、顯示按鍵面板和電源板三部分組成。圖2是控制器的結(jié)構(gòu)框圖,其工作原理是:首先用戶通過(guò)顯示按鍵面板設(shè)定預(yù)設(shè)壓力和控制器運(yùn)行的各個(gè)功能參數(shù),保存至E2PROM存儲(chǔ)器用作掉電存儲(chǔ),位于用戶管網(wǎng)端的遠(yuǎn)傳壓力表輸出的電壓或是電流信號(hào)經(jīng)過(guò)采樣電路轉(zhuǎn)化為數(shù)字量,送入單片機(jī)與預(yù)設(shè)壓力進(jìn)行比較,計(jì)算并輸出模擬控制量和繼電器輸出狀態(tài)量。其中,模擬控制量輸出經(jīng)過(guò)變頻器控制模塊電路送給變頻器,用以控制變頻器的輸出頻率;繼電器輸出狀態(tài)量經(jīng)過(guò)繼電器輸出電路送給繼電器組,用以控制各個(gè)泵工作于工頻或是變頻狀態(tài)。最后單片機(jī)把實(shí)際壓力值、預(yù)設(shè)壓力值、輸出頻率和各個(gè)泵的工作狀態(tài)送到顯示面板,以便用戶進(jìn)行觀測(cè)和操作。
?
3 系統(tǒng)單元電路
3.1 主控制器的選擇
主控制器選用單片機(jī)C8051F410,它是一款完全集成的混合信號(hào)片上系統(tǒng)型芯片,其內(nèi)部還集成了12位高速ADC模塊和電流輸出型DAC模塊,同時(shí)硬件實(shí)現(xiàn)的SMBus和UART串行接口,能方便處理器與E2PROM通信和數(shù)據(jù)串行輸出。C2805lF410還支持JTAG實(shí)時(shí)仿真和跟蹤,能夠進(jìn)行非侵入式(不占用片內(nèi)資源)的全速在系統(tǒng)調(diào)試。
3.2 系統(tǒng)電源電路
該設(shè)計(jì)采用基于三端穩(wěn)壓芯片TOP221Y的高精度開關(guān)穩(wěn)壓電源電路,主電路拓?fù)浣Y(jié)構(gòu)選用單端反激式直流變換電路,其輸出采用兩組直流低壓電源:主回路為系統(tǒng)的數(shù)字電路部分提供5 V直流電源,副回路為系統(tǒng)的模擬部分提供15 V直流電源。
3.3 壓力表信號(hào)采集與光電隔離電路
位于用戶管網(wǎng)的壓力傳感器監(jiān)測(cè)到的壓力信號(hào)經(jīng)過(guò)光電隔離電路進(jìn)行濾波和隔離處理后,進(jìn)入C8051F-410內(nèi)部的ADC模塊,實(shí)現(xiàn)按比例轉(zhuǎn)換,轉(zhuǎn)換為12 b數(shù)字量,以供單片機(jī)對(duì)其信號(hào)進(jìn)行處理和計(jì)算。為了保證輸入量與轉(zhuǎn)換量程相稱,充分發(fā)揮A/D轉(zhuǎn)換器的分辨率,在對(duì)壓力信號(hào)進(jìn)行A/D轉(zhuǎn)換之前經(jīng)過(guò)光電隔離電路時(shí),就已將外部傳入的O~5 V模擬電壓轉(zhuǎn)換為O~2 V模擬電壓信號(hào)。電路原理如圖3所示。

?
由圖3可見,外部電壓信號(hào)從IN端口接入,經(jīng)過(guò)隔離和濾波電路,轉(zhuǎn)換為O~2 V電壓,從ADC端口送入單片機(jī)。同時(shí)在模擬信號(hào)采集到單片機(jī)系統(tǒng)的過(guò)程中,各種干擾信號(hào)都會(huì)隨著被測(cè)量信號(hào)進(jìn)入MCU控制系統(tǒng),這些信號(hào)迭加在有用的被測(cè)信號(hào)上會(huì)降低測(cè)量的準(zhǔn)確度,造成控制系統(tǒng)的不穩(wěn)定。以上電路設(shè)計(jì)便利用線性光耦進(jìn)行光電之間的相互轉(zhuǎn)換,利用光作為媒介進(jìn)行信號(hào)傳輸,在電氣上使測(cè)量系統(tǒng)與現(xiàn)場(chǎng)信號(hào)完全隔離,從而實(shí)現(xiàn)了電平線性轉(zhuǎn)換且不把現(xiàn)場(chǎng)的電噪聲干擾引入到控制系統(tǒng)中。
3.4 控制變頻器輸出電路
單片機(jī)通過(guò)內(nèi)部的電流輸出型數(shù)/模轉(zhuǎn)換模塊(IDAC),將計(jì)算得出的數(shù)字量轉(zhuǎn)化為模擬電壓輸出,其輸出電壓經(jīng)過(guò)濾波和比例轉(zhuǎn)換處理后用來(lái)控制變頻器的頻率。同時(shí)為了保證單片機(jī)IDAC輸出電壓穩(wěn)定可靠,不受干擾,外部電路同樣采用了光電隔離電路,其電路原理圖如圖4所示。

?
3.5 外擴(kuò)E2PROM存儲(chǔ)器電路
該設(shè)計(jì)采用Atmel公司的E2PROM芯片AT24C02,其體積小,性能優(yōu),使用靈活方便,能夠在系統(tǒng)掉電之后存儲(chǔ)一些用戶設(shè)定和運(yùn)行的狀態(tài)參數(shù),以便重新啟動(dòng)機(jī)器之后讀取。處理器自身集成的SMBus兼容I2C接口,可以直接與AT24C02通信,此方案不僅設(shè)計(jì)單,工作可靠,而且成本低廉。電路原理如圖5所示。

?
3.6 繼電器控制輸出電路
主控制器驅(qū)動(dòng)5個(gè)靈敏繼電器K1~K5,分別控制1個(gè)泄流閥和2個(gè)泵電機(jī),實(shí)現(xiàn)對(duì)泄流閥的打開與關(guān)斷控制和泵的變頻或工頻狀態(tài)切換。單片機(jī)通過(guò)信號(hào)線RX與TX將繼電器狀態(tài)控制信號(hào)串行輸出給串行移位寄存器芯片74HC595D,由74HC595D將輸出狀態(tài)的硬件鎖存,以防止輸出狀態(tài)被干擾,最后通過(guò)達(dá)林頓管ULN2003提高驅(qū)動(dòng)能力,以控制水泵電機(jī)的工作狀態(tài)和泄流閥的動(dòng)作。
4 控制器的軟件設(shè)計(jì)
該設(shè)計(jì)中對(duì)變頻器輸出頻率的調(diào)節(jié)采用PID控制算法,其控制算法就是對(duì)偏差的比例、積分和微分。它是連續(xù)系統(tǒng)中技術(shù)成熟,應(yīng)用最廣泛的一種算法,特別是在工業(yè)控制中,因?yàn)榭刂茖?duì)象的精確數(shù)學(xué)模型很難建立,系統(tǒng)參數(shù)又經(jīng)常發(fā)生變化,因此常采用PID控制算法,其控制示意圖如圖6所示。

?
它的數(shù)學(xué)表達(dá)式為:

?
式中:KP,KI和KD分別為比例系數(shù)、積分系數(shù)和微分系數(shù);e(t)為誤差。
式(1)離散化后可以用計(jì)算機(jī)很方便地實(shí)現(xiàn),其位置式PID控制規(guī)律的數(shù)學(xué)表達(dá)式為:
?
式中:e(j)為第j次采樣的誤差值;T為采樣周期。
在實(shí)際應(yīng)用中,一般選擇增量式PID控制規(guī)律。因?yàn)樵隽啃退惴ㄅc位置型算法相比,前者不需要做累加,不易產(chǎn)生大的累加誤差,而且得出的是控制量的增量,誤動(dòng)作的影響比較小,更易于實(shí)現(xiàn)手動(dòng)到自動(dòng)的無(wú)沖擊切換。增量式數(shù)字PID控制算式為:

?
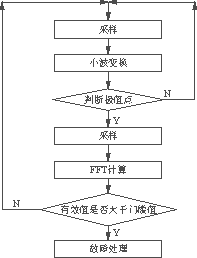
在該設(shè)計(jì)中,執(zhí)行機(jī)構(gòu)采用變頻器,由于采用增量式數(shù)字PID控制算法,所以對(duì)于每個(gè)采樣周期,控制器輸出的控制量都相對(duì)于上次的增加量,其系統(tǒng)控制算法流程如圖7所示。

?
圖7為增量式數(shù)字PID算法在整個(gè)系統(tǒng)中的控制流程,每次進(jìn)入A/D定時(shí)采集中斷,壓力信號(hào)便會(huì)被轉(zhuǎn)化為數(shù)字量,PID控制模塊便將壓力信號(hào)的數(shù)字量通過(guò)算法處理得出相應(yīng)的控制輸出數(shù)字量,接著啟動(dòng)D/A將數(shù)字輸出轉(zhuǎn)換為模擬電壓輸出,其模擬電壓輸出用以控制變頻器。此模塊配合繼電器開關(guān)輸出模塊和壓力采集模塊,通過(guò)相應(yīng)的控制策略實(shí)現(xiàn)實(shí)時(shí)測(cè)量和控制,保持供水管網(wǎng)壓力的動(dòng)態(tài)平衡。為了方便現(xiàn)場(chǎng)調(diào)試,在設(shè)計(jì)中使PID調(diào)整的上升、下降和跟蹤采樣周期的設(shè)定值可變,可以在開機(jī)時(shí)通過(guò)鍵盤改變其值,從而改變PID參數(shù),以適應(yīng)不同場(chǎng)合的控制需要。如圖8所示,曲線1是參數(shù)調(diào)整前電機(jī)模塊控制電壓隨時(shí)間變化的響應(yīng)曲線;曲線2為參數(shù)經(jīng)過(guò)多次調(diào)整之后的響應(yīng)曲線。可以看出,經(jīng)過(guò)參數(shù)調(diào)整,系統(tǒng)的響應(yīng)性能有了較大的提高,所以在實(shí)際應(yīng)用環(huán)境中需要經(jīng)過(guò)多次調(diào)整設(shè)定值,以保證達(dá)到最佳的控制性能。

?
5 結(jié)語(yǔ)
分析了智能給水控制器的軟件和硬件設(shè)計(jì)。該控制器以SoC單片機(jī)C8051F410為核心,實(shí)現(xiàn)了對(duì)管網(wǎng)壓力的采集,對(duì)變頻器輸出的控制,而且擁有獨(dú)特靈活的用戶界面。控制器不但采樣和控制精度高,而且有多種保護(hù)和抗干擾功能,保證了控制器的穩(wěn)定性和安全性.










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論