 電子發燒友App
電子發燒友App


?
飛行模擬器操縱負荷系統是向飛行員提供操縱力的操縱負荷仿真系統,用于仿真飛機縱向駕駛桿力、橫向駕駛桿力和腳蹬力。目前,國內外大型的飛行模擬器操縱負荷仿真系統都采用力伺服系統加載的仿真方法,力伺服系統加載既可以采用液壓式,又可以采用電動式。液壓力伺服系統雖然功率大、快速性好、精度高,但系統復雜、成本高、維護工作量大;電動式力伺服系統主要使用力矩電機產生負載力,具有成本低、易于維護、使用方便等優點,已經成為一種操縱負荷仿真系統的發展趨勢。
本文以某型教練機為例,提出了一種新型的電磁式力伺服加載的飛行模擬器操縱負荷仿真系統。依據負載力的數學模型,利用電磁式力伺服系統加載技術,實現了飛機操縱負荷系統縱向駕駛桿力的仿真。
1 負載力數學模型
電磁式操縱負荷系統是人在回路仿真系統中的負載模擬裝置,要完成對飛行員十分敏感的駕駛桿力、腳蹬力的仿真。正確建立飛行中飛行員握點處負載力的模型是十分關鍵的。以飛行員直接操縱舵面為例,縱向負載力不僅與桿的位移有關,而且還與桿的運動狀態及飛機的運動狀態有關,飛行員感受到的負載力主要由氣動力、慣性力、庫侖摩擦力、粘性摩擦力、彈簧力等組成,其中氣動力是飛行員在握點處感受到的主要載荷力。總負載力可表示為:
?
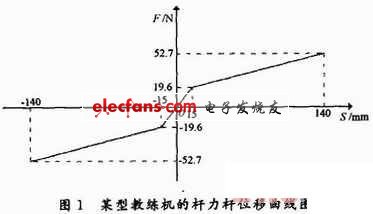
圖1為某型教練機的桿力位移曲線。
?
操縱負荷系統計算機要能實時地計算出操縱駕駛桿時的模型負載力,給操縱者提供逼真的力感覺,使飛行員在飛行模擬器駕駛桿握點處能感受到像在真正駕駛某型教練機時所具有的力感,即桿力隨位移的變化規律應與圖1所示某型教練機桿力桿位移曲線一致,從而訓練飛行員能根據力感大小,判斷飛機的操縱性、穩定性,并能正確把握操縱量的大小范圍。
2 仿真系統設計
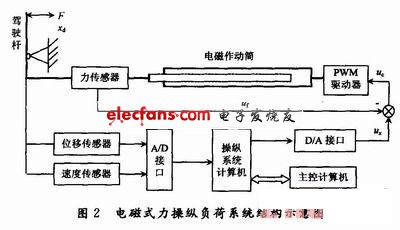
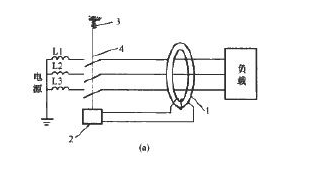
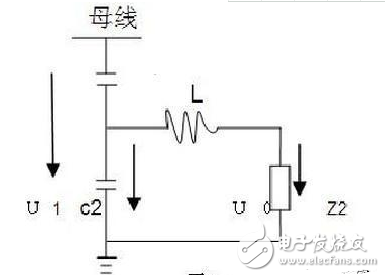
2.1 仿真系統結構
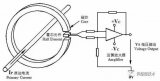
仿真系統結構如圖2所示。當拉桿或推桿時,駕駛桿的位置發生變化,產生的位移、速度信號經傳感器實時地送給操縱系統計算機,操縱系統計算機同時還實時地從主控計算機接收與縱向負載力有關的參數,按有關數學模型計算出當前反應在握桿點、操縱者施加在駕駛桿上的縱向模型負載力信號,經D/A變換后為ux。同時,駕駛桿的位置變化通過力傳感器傳遞給作動筒,使作動筒伸長量發生變化,力傳感器還將縱向負載力轉變成電信號uf,它與ux之差構成PWM驅動器的控制信號uc,控制信號uc經PWM驅動器放大后驅動電磁作動筒工作,使作動筒的伸長量發生新的變化。經過力傳感器的負反饋作用,可使uf與ux的差值趨于零,保證了通過電磁作動筒、力傳感器給駕駛桿加載的力等于按負載力數學模型計算的力。
?
2.2 電磁作動筒的設計
飛行模擬器電磁式操縱負荷系統的核心部件是電磁作動筒,其性能決定了電磁式操縱負荷系統的性能,對飛行模擬器的整機性能也產生重大影響。
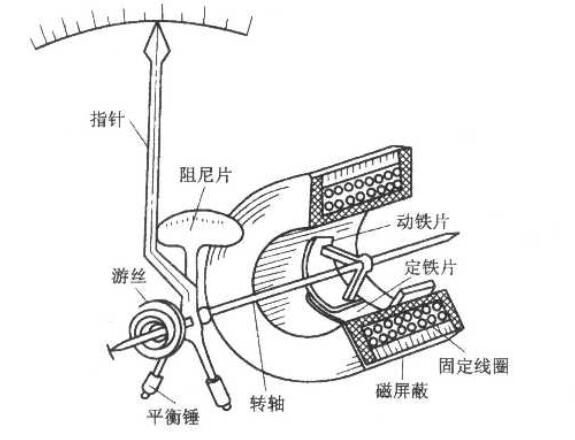
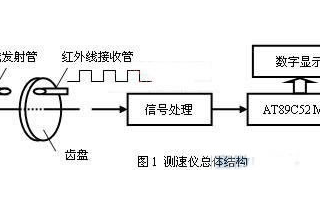
2.2.1 電磁作動筒的組成
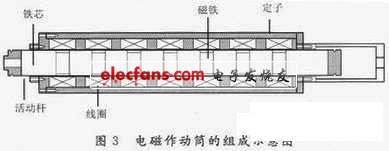
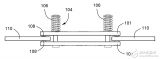
飛行模擬器電磁式操縱負荷系統的電磁作動筒主要由活動桿、定子兩部分組成,如圖3所示。其中活動桿由七塊永久磁鐵和八塊鐵芯組成,活動桿的外部材料采用金屬鋁。定子的內部結構主要由七個線圈組成,線圈一般為銅線,相鄰線圈的繞向相反,線圈之間是尼龍,而外筒則是由不銹鋼制成。這里選擇線圈的寬度為52mm,磁鐵寬度為35mm,尼龍的寬度為10mm。
?
2.2.2 制作電磁作動筒材料的選擇
制作電磁作動筒材料的選擇與導磁率有關。導磁率是表示物質磁化性能的一個物理量,是物質中磁感應強度B與磁場強度H之比,又稱為絕對磁導率。物質的絕對磁導率和真空磁導率比值稱為相對磁導率。鑄鐵的相對磁導率為200~400;硅鋼片為7 000~10 000;鎳鋅鐵氧體為10~1 000;鎳鐵合金為2 000;錳鋅鐵氧體為300~5 000;坡莫合金為20 000~200 000;空氣的相對導磁率為1.000 000 04;鉑為1.000 26;汞、銀、銅、碳(金剛石)、鉛等均為抗磁性物質,其相對磁導率都小于1;銅具有抗磁性,相對導磁率也有0.999 90;純鐵為順磁性物質,其相對磁導率會達到400以上,用銅裹住鐵并不能阻斷磁力,在某些特殊情況下,銅的抗磁性會表現出來。各種物質導磁性有所差異,如空氣、材料、銅、鋁、橡膠、塑料等相對導磁率近似為1,他們具有抗磁性。而鐵磁性材料如鑄鐵、鑄鋼、硅鋼片、鐵氧體、坡莫合金等材料具有良好的導磁性能,可用于導磁,也可用于隔磁。由此可知,電磁作動筒所采用的幾種材料,其導磁率應該近似一樣,同時為了提高系統效率,要求線圈覆蓋面積大,且不易過厚。
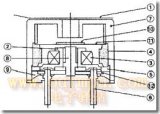
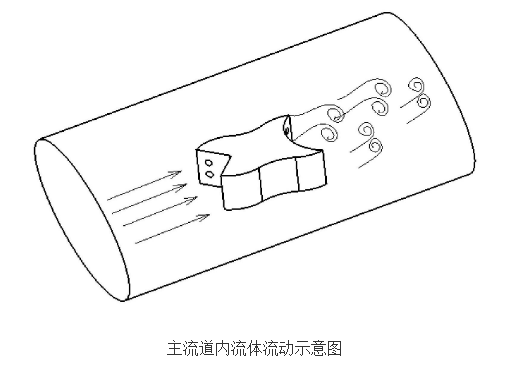
2.2.3 電磁作動筒的工作原理
電磁作動筒示意圖如圖4所示,活動桿中的七塊磁鐵NS極的排列方向是同極相對,所以從左到右依次為S極N極、N極S極、S極N極、N極S極、S極N極、N極S極、S極N極,并且相鄰的兩個線圈的磁場方向不同。磁鐵的磁力線從N極出發穿過線圈,然后再回到S極。

?
線圈和低碳鋼筒構成了定子。外筒是由低碳鋼制成的,低碳鋼的磁阻是比較小的,而且成本比較低、強度又比較大,適合做電磁作動筒的外殼。
定子的結構圖如圖3所示,線圈繞在鋁管上,相鄰線圈由尼龍隔開,線圈裝在外筒內,兩端由低碳鋼法蘭固定,外筒和法蘭同時起到導磁和隔磁的作用。
當活動桿中的永久磁鐵的磁力線從N極出發回到S極,形成了一個閉合回路,磁力線會穿過線圈。磁力線的路徑是走從N極到S極的最短路線。線圈一般采用銅線。線圈與線圈之間的連接物,也就是圖3中線圈兩邊的陰影部分,它們是由尼龍制成的。因為尼龍與銅的導磁性相當,為了提高工作效率,一般增加線圈所圍面積。從活動桿中永久磁鐵N極出發的磁力線穿過線圈進入鋼筒(假設磁力線是垂直進入線圈的),低碳鋼筒相當于一個導磁機構,讓磁力線通過然后再穿過線圈回到磁鐵的S極,這樣就形成了一個閉合的回路。這樣的設計有利于集中磁鐵所發出的磁力線,減少磁場的浪費。
當線圈通電時,線圈產生磁場,由物理電磁學方面的知識可以知道線圈內部的磁場是勻強磁場。因為線圈所產生的感應磁場對活動桿的影響很微小,可以忽略不計,假設活動桿相對線圈的位移方向已知,當磁鐵的磁力線穿過通電線圈時,通電線圈就會受到力的作用,因為電流的方向和磁力線的穿過方向都是已知的,所以線圈受力方向也是可以判斷出來的。由圖4可以知道,活動桿相鄰的線圈電流方向是相反的,相鄰的磁鐵極性是同級相對。所以用左手定則,對每個線圈進行受力分析,可以判斷出每個線圈的受力方向。
由公式F=nBILsinθ可以知道線圈受力的大小。其中n為線圈的匝數;B為磁鐵的磁感強度;I為線圈中通電流的大小;L為線圈一圈的周長;θ為I與B的夾角。可以假設磁力線是垂直進入線圈的,即θ為90°,則公式可簡化為F=nBIL,當活動桿發生位移時,線圈不同部位因為穿過的磁力線方向不同,所受力的方向也不同,而n不同導致所受力的大小不同,因為銅線的粗細是均勻的,所以線圈的匝數在某種程度上可以表示位移量。由于磁場強度B只由磁鐵產生,所以可以認為是穩恒不變的,則力F是一個與位移量及通電線圈電流大小有關的函數。增大位移量或電流大小,都可以在不同程度上增加F的大小。
2.3 系統軟件實現
電磁式操縱負荷系統的軟件用Visual C++6.0編寫,主要由初始化模塊、模型負載力計算模塊和故障處理模塊組成。
系統軟件的主要任務是依據縱向負載力的數學模型,實時計算縱向模型負載力。首先實時地從主控計算機和位移傳感器、速度傳感器中接收當前迎角或側滑角、馬赫數、升降舵襟翼角及升降舵偏角、升降舵調整片偏角、縱向角加速度、縱向過載、駕駛桿位移、駕駛桿移動速度及其他與負載力有關的參數,在預先給定的二維插值函數表內插值和計算得到當前時刻的鉸鏈力矩導數,計算出當前時刻的鉸鏈力矩及氣動力,然后計算當前的其他負載力,最后計算總的模型負載力。
3 試驗驗證
試驗的目的是找出操縱負荷系統中的力、位移、電壓之間的關系,得出三者之間的關系曲線,驗證電磁式操縱負荷系統的性能。
實驗設備主要有:電磁式操縱負荷系統、示波器、卷尺(精確到0.1 mm)、鋼尺(精確到0.5 mm)、膠帶、剪刀和標記筆等。
因為推桿和拉桿是可逆的過程,所以實驗只考慮其中之一,以拉桿為例,假設其產生的操縱負荷的力為正。
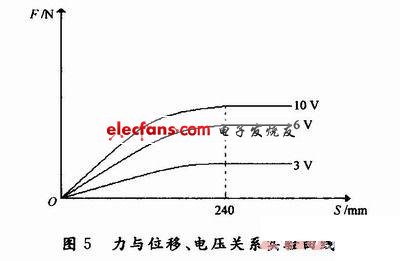
由于操縱機構的上下桿長度之比為8:1,所以桿位移量為磁鐵位移量的8倍。在電壓為3 V,6 V,10 V這三種情況下,改變位移的大小,記錄力隨位移的變化曲線,如圖5所示。
?
由圖5可以看出,電磁操縱負荷系統的力、位移、電壓關系實驗曲與圖1所示的某型教練機桿力桿位移曲線基本吻合,同時還得出結論:鐵芯長度+磁鐵長度=最大行程/2;力是位移與電流的函數;線圈最大寬度小于最大行程。
4 結語
利用電磁作動筒作為飛行模擬器操縱負荷仿真系統的力伺服系統,構成了飛機縱向操縱負荷仿真系統,現在已經成功應用于某型教練機飛行模擬器的縱向操縱負荷仿真系統中。通過近幾年的模擬訓練證明,該方法仿真精度高,響應速度快,負載力模型和參數易于修改,可適應不同仿真對象和不同工作模式負載力特性變化的要求,可推廣應用于多種類型的飛行模擬器的操縱系統中。該方法還可用于橫向操縱負載力及腳蹬力的仿真。











 工商網監
工商網監
評論