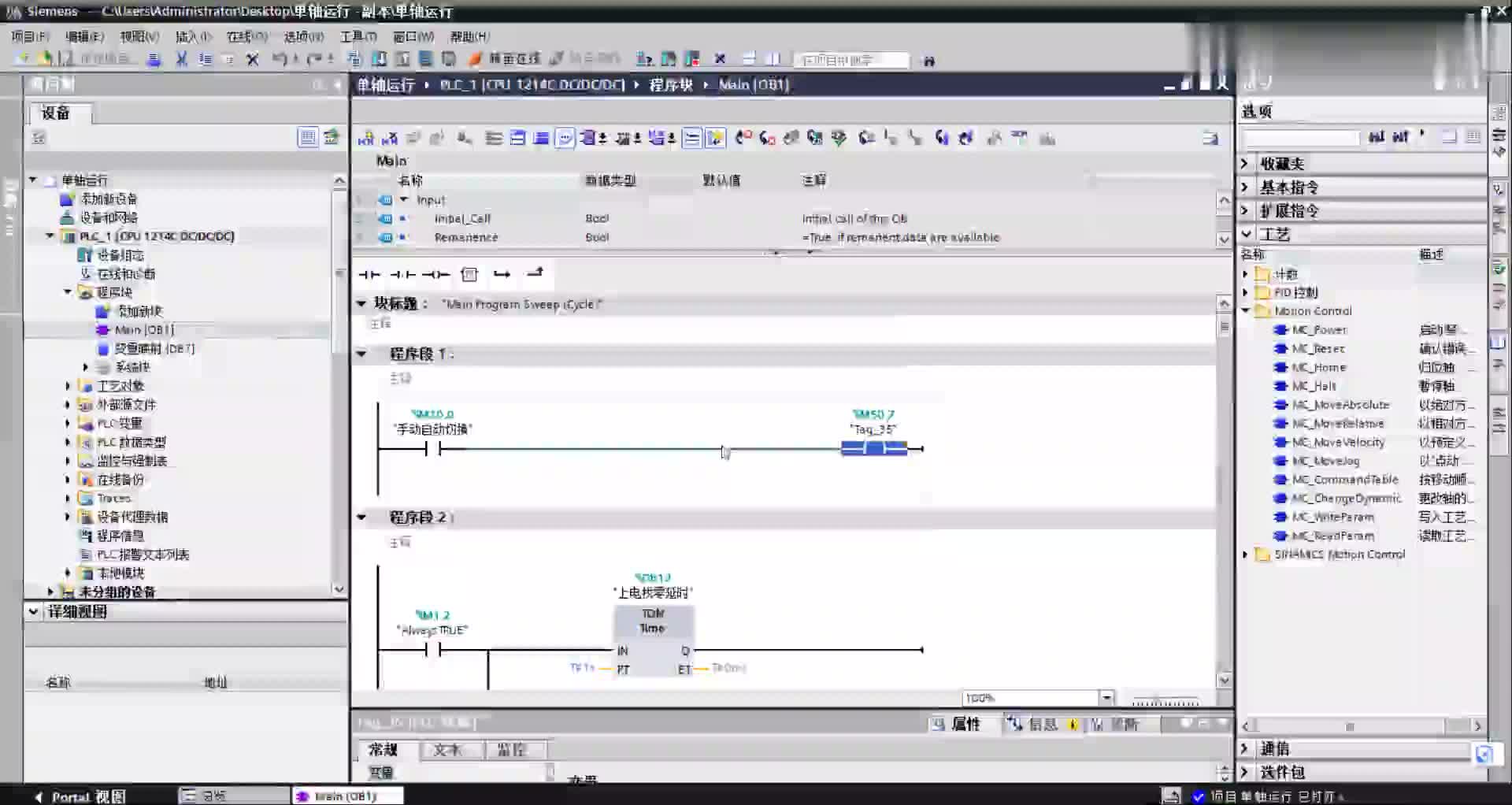
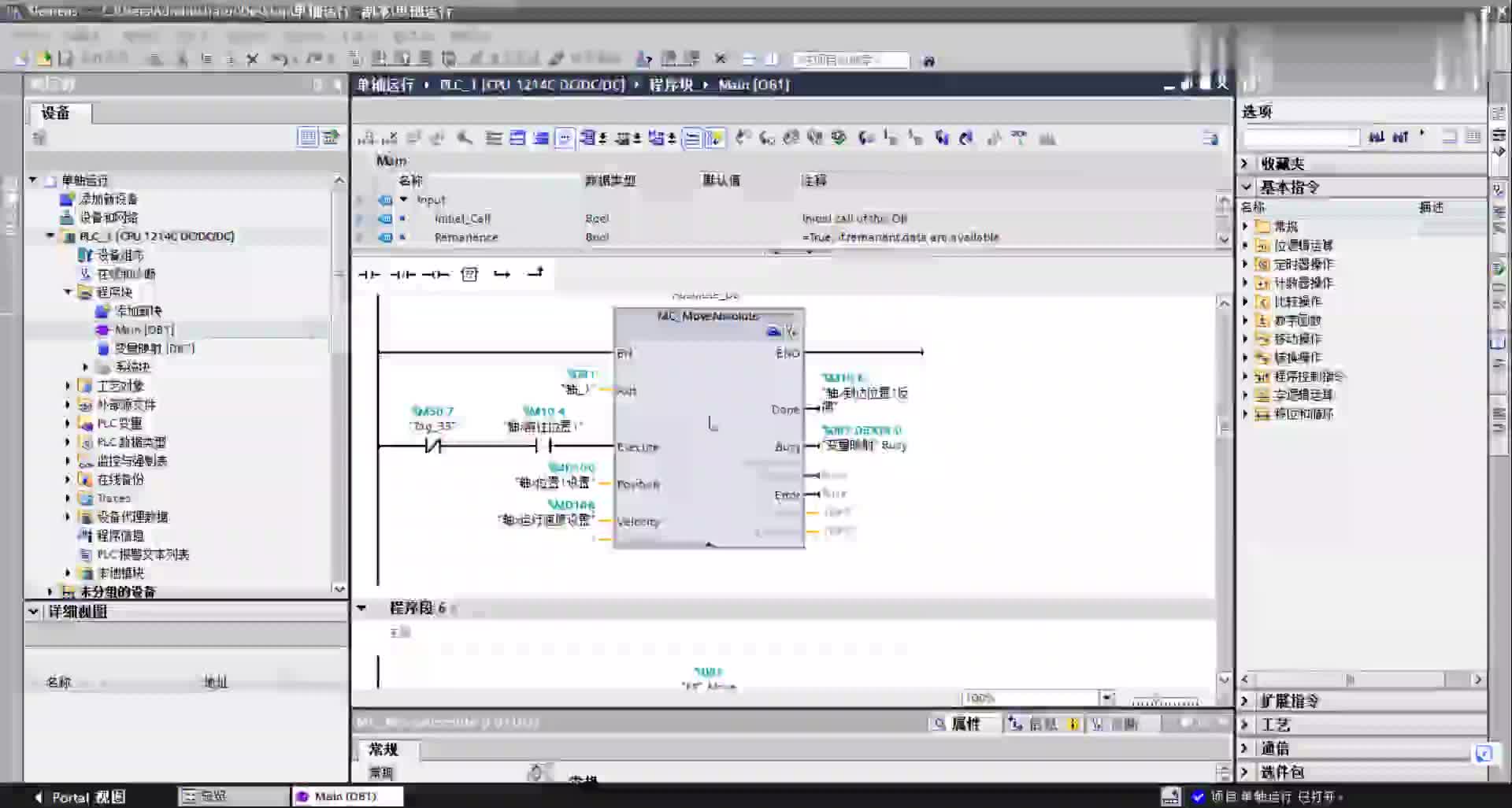
PLC的運(yùn)動(dòng)控制是指PLC系統(tǒng)通過(guò)控制運(yùn)動(dòng)設(shè)備的運(yùn)動(dòng)軸,實(shí)現(xiàn)精確、穩(wěn)定和可編程的運(yùn)動(dòng)控制功能。它可以控制運(yùn)動(dòng)設(shè)備(如電機(jī)、伺服驅(qū)動(dòng)器等)的位置、速度和加速度等參數(shù),以實(shí)現(xiàn)所需的運(yùn)動(dòng)軌跡和運(yùn)動(dòng)邏輯
2023-10-23 08:08:08 81
81 
PLC的運(yùn)動(dòng)控制是指PLC系統(tǒng)通過(guò)控制運(yùn)動(dòng)設(shè)備的運(yùn)動(dòng)軸,實(shí)現(xiàn)精確、穩(wěn)定和可編程的運(yùn)動(dòng)控制功能。它可以控制運(yùn)動(dòng)設(shè)備(如電機(jī)、伺服驅(qū)動(dòng)器等)的位置、速度和加速度等參數(shù),以實(shí)現(xiàn)所需的運(yùn)動(dòng)軌跡和運(yùn)動(dòng)邏輯。
2023-10-20 10:20:1330 點(diǎn)位運(yùn)動(dòng)控制:即僅對(duì)終點(diǎn)位置有要求,與運(yùn)動(dòng)的中間過(guò)程即運(yùn)動(dòng)軌跡無(wú)關(guān)。相應(yīng)的運(yùn)動(dòng)控制器要求具有快速的定位速度,在運(yùn)動(dòng)的加速段和減速段,采用不同的加減速控制策略。
2023-10-09 17:10:10303 (1)加速和減速控制:PLC可以使用加速度和減速度曲線來(lái)控制機(jī)器的啟動(dòng)和停止過(guò)程。通過(guò)逐漸增加或減少速度,而不是突然變化,可以使機(jī)器的運(yùn)動(dòng)更加平滑,并減輕運(yùn)動(dòng)過(guò)程中的沖擊和振動(dòng)。 (2)脈沖寬度調(diào)制
2023-09-28 07:10:0290 現(xiàn)在
PLC的
運(yùn)動(dòng)控制功能越來(lái)越強(qiáng)了,圓弧插補(bǔ)、螺旋插補(bǔ)、電子凸輪都能輕松勝任了,那
運(yùn)動(dòng)控制器和具備
運(yùn)動(dòng)控制功能的
PLC的差別在哪里,
運(yùn)動(dòng)控制器以后的優(yōu)勢(shì)又在哪里?
PLC及
運(yùn)動(dòng)控制器發(fā)展到今天,它們?cè)?/div>
2023-08-08 08:09:46412 、減速度和位置調(diào)節(jié)等參數(shù),以實(shí)現(xiàn)精確的位置控制。 (2)多軸協(xié)同控制: 天車通常具有多個(gè)運(yùn)動(dòng)軸,如起升、行走、變幅等。 PLC需要支持多軸協(xié)同控制,能夠同時(shí)控制和協(xié)調(diào)多個(gè)運(yùn)動(dòng)軸的運(yùn)動(dòng),以實(shí)現(xiàn)天車的復(fù)雜運(yùn)動(dòng)模式和路徑規(guī)劃。 (3)安全性和
2023-08-07 10:15:01129 “現(xiàn)在 PLC 的運(yùn)動(dòng)控制功能越來(lái)越強(qiáng)了,圓弧插補(bǔ)、螺旋插補(bǔ)、電子凸輪都能輕松勝任了,那運(yùn)動(dòng)控制器和具備運(yùn)動(dòng)控制功能的 PLC 的差別在哪里,運(yùn)動(dòng)控制器以后的優(yōu)勢(shì)又在哪里?”
2023-08-06 09:30:01758 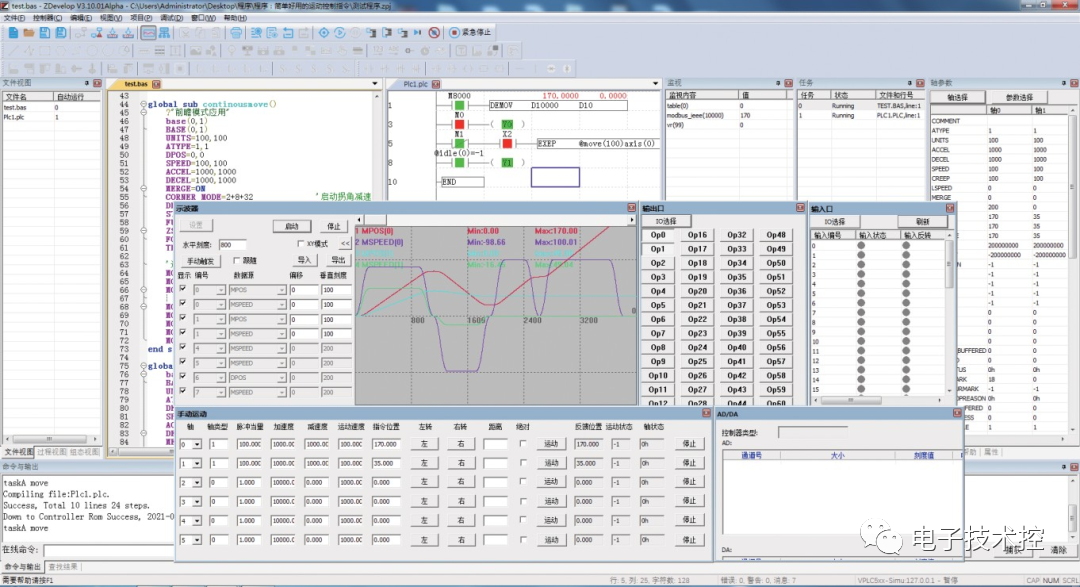
前言最近有不少做PLC開發(fā)的小伙伴,在一些咨詢運(yùn)動(dòng)控制卡、運(yùn)動(dòng)控制器相關(guān)的問(wèn)題,很多人不清楚它們之間有什么區(qū)別和聯(lián)系,今天跟大家就PLC、運(yùn)動(dòng)控制卡、運(yùn)動(dòng)控制器區(qū)別及選型做個(gè)分享。背景隨著工業(yè)技術(shù)
2023-08-04 08:09:12592 在網(wǎng)上看到搬運(yùn)平車的介紹,搬運(yùn)平車的運(yùn)動(dòng)控制是通過(guò)PLC和遙控器結(jié)合來(lái)控制實(shí)現(xiàn)的,自己就想著嘗試自己寫下程序來(lái)實(shí)現(xiàn)控制,自己寫的程序通過(guò)觸摸屏來(lái)進(jìn)行模擬。
2023-07-02 09:35:29457 
PLC專長(zhǎng)在于邏輯IO控制 而運(yùn)動(dòng)控制卡就跟專業(yè)伺服電機(jī)的控制對(duì)運(yùn)動(dòng)而已他的指令很簡(jiǎn)單控制的方式更多齒輪,插補(bǔ),凸輪等但在IO處理起來(lái)就不像有PLC的梯形圖那么簡(jiǎn)單要語(yǔ)言編程。
2023-06-29 14:13:01267 今天咱們來(lái)談一談如何利用PLC來(lái)實(shí)現(xiàn)簡(jiǎn)單的搬運(yùn)動(dòng)作。這個(gè)例子完美地用到了順序控制的指令,實(shí)際應(yīng)用起來(lái)真的是非常方便,程序循環(huán)控制起來(lái)也是得心應(yīng)手!
2023-06-26 15:31:36531 
今天的PLC不再局限于邏輯控制,在運(yùn)動(dòng)控制、過(guò)程控制等領(lǐng)域也發(fā)揮著十分重要的作用。來(lái)學(xué)習(xí)一下這些動(dòng)圖吧!
2023-06-15 10:57:01123 
FOC算法中的電流環(huán),速度環(huán)都涉及到PID控制
PID又分位置式PID控制算法和增量式PID控制算法,而個(gè)人認(rèn)為在電機(jī)控制中使用增量式PID效果會(huì)更好一些。下面主要介紹幾種增量式PID
控制算法及C代碼實(shí)現(xiàn)。
2023-05-05 11:51:06 7
7 的東西懂得更多,技術(shù)棧更全面,可以自己獨(dú)立完成項(xiàng)目評(píng)估、制圖、選型、PLC程序開發(fā)調(diào)試,到上位機(jī)開發(fā),甚至于更上層的WEB端、移動(dòng)端。 言歸正傳,本文主要是分享一個(gè)工業(yè)現(xiàn)場(chǎng)常用的運(yùn)動(dòng)控制案例,從硬件選型到
2023-04-18 09:21:090 運(yùn)動(dòng)控制器主要分為三類,分別是PC-based、專用控制器、PLC。其中PC-based運(yùn)動(dòng)控制器在電子、EMS等行業(yè)被廣泛應(yīng)用;專用控制器的代表行業(yè)是風(fēng)電、光伏、機(jī)器人、成型機(jī)械等等;PLC則在橡膠、汽車、冶金等行業(yè)備受青睞。
2023-04-10 12:56:43661 S7-200 SMART采用了新型的設(shè)計(jì)方法,信號(hào)板可以擴(kuò)展通訊接口,數(shù)字量接口,模擬量接口,并且能合理的分配空間。西門子PLC S7-200 SMART具有PID控制功能,為用戶在自動(dòng)化驅(qū)動(dòng)控制
2023-04-06 14:46:383929 `課程推薦>>每天1小時(shí),龍哥手把手教您LabVIEW視覺設(shè)計(jì)點(diǎn)擊>> GET龍哥labview機(jī)器視覺實(shí)用教程(運(yùn)動(dòng)控制篇)點(diǎn)擊&
2011-12-02 10:47:06
的邏輯功能,使 PID 控制更加靈活。將模擬PID 控制規(guī)律進(jìn)行適當(dāng)變換后,以微控制器或計(jì)算機(jī)為運(yùn)算核心,利用軟件程序來(lái)實(shí)現(xiàn) PID 控制和校正,就是數(shù)字(軟件)PID 控制。 由于數(shù)字控制是一種采樣控制,它只能根據(jù)采樣時(shí)刻的偏差值來(lái)計(jì)算控制量,
2023-03-09 14:23:12831 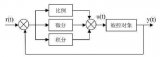
運(yùn)動(dòng)控制器主要分為三類,分別是PC-based、專用控制器、PLC。其中PC-based運(yùn)動(dòng)控制器在電子、EMS等行業(yè)被廣泛應(yīng)用;專用控制器的代表行業(yè)是風(fēng)電、光伏、機(jī)器人、成型機(jī)械等等;PLC則在橡膠、汽車、冶金等行業(yè)備受青睞。
2023-03-08 16:52:431534 01 綜 述 從本篇起,將連續(xù)介紹基于ABB AC500 V3系列PLC的運(yùn)動(dòng)控制。實(shí)驗(yàn)的基礎(chǔ)配置如下圖: 運(yùn)動(dòng)控制實(shí)在是一個(gè)極大的題目,包含控制器、驅(qū)動(dòng)器、電機(jī),控制方式等很多要素,且各個(gè)要素都有
2023-03-08 15:53:00554 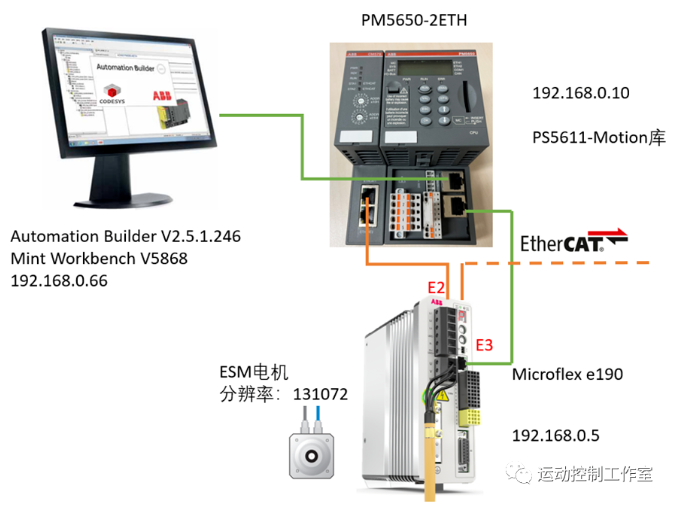
正運(yùn)動(dòng)技術(shù)專注于運(yùn)動(dòng)控制技術(shù)研究和通用運(yùn)動(dòng)控制軟硬件產(chǎn)品的研發(fā),是國(guó)家級(jí)高新技術(shù)企業(yè)。主要業(yè)務(wù)有:運(yùn)動(dòng)控制卡_運(yùn)動(dòng)控制器_EtherCAT運(yùn)動(dòng)控制卡_EtherCAT控制器_運(yùn)動(dòng)控制系統(tǒng)_視覺控制器__運(yùn)動(dòng)控制PLC_運(yùn)動(dòng)控制_機(jī)器人控制器_視覺定位等等。
2022-05-20 16:51:005097 
三菱PLC(可編程邏輯控制器)編程實(shí)例項(xiàng)目例程控制溫度PID實(shí)例
2022-05-13 16:13:1049 運(yùn)動(dòng)控制器比plc高級(jí)嗎?
2021-09-19 09:05:003845 基于PLC控制的小車往返運(yùn)動(dòng)原理圖
2021-06-21 09:29:0926 作為經(jīng)典的控制理論,PID控制規(guī)律仍然是當(dāng)今工控行業(yè)的主導(dǎo)控制方式,無(wú)論復(fù)雜、簡(jiǎn)單的控制任務(wù),PID控制都能取得滿意的控制效果,前提是PID參數(shù)必須選擇合適。可以說(shuō),通過(guò)適當(dāng)?shù)?b style="color: red">PID參數(shù),PID控制
2021-06-01 10:28:0157 PID各參數(shù)對(duì)PID運(yùn)算輸出的影響。進(jìn)而分析各參數(shù)影響的曲線形狀。通過(guò)相關(guān)的曲線形狀,了解PID參數(shù)整定的方法。仔細(xì)分清各個(gè)參數(shù)的作用,和擾動(dòng)情況下的相應(yīng)曲線,可以快速準(zhǔn)確地判斷一個(gè)自動(dòng)調(diào)節(jié)系統(tǒng)中,到底應(yīng)該設(shè)置什么樣的參數(shù)。
2021-04-07 15:29:127 精確的控制系統(tǒng)數(shù)學(xué)模型,有較強(qiáng)的靈活性和適應(yīng)性。但是在數(shù)字PLC控制系統(tǒng)中,普通的 PID算法對(duì)所有過(guò)去狀態(tài)存在依賴性,從而引起系統(tǒng)較大的超調(diào),使系統(tǒng)穩(wěn)定性下降。增量式PID控制算法每次輸出只輸出控制
2021-03-28 09:56:352909 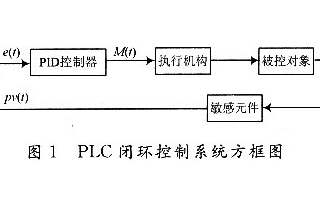
而運(yùn)動(dòng)控制卡就跟專業(yè)伺服電機(jī)的控制對(duì)運(yùn)動(dòng)而已他的指令很簡(jiǎn)單控制的方式更多齒輪,插補(bǔ),凸輪等但在IO處理起來(lái)就不像有PLC的梯形圖那么簡(jiǎn)單要語(yǔ)言編程。
2021-01-07 14:47:0219507 PLC 控制模擬量時(shí),PID 調(diào)節(jié)是較好的方法之一。本文以歐姆龍 PLC 為代表,詳細(xì)闡述了用算術(shù)運(yùn)算指令、PID 功能指令實(shí)現(xiàn) PID 閉環(huán)控制的方法。
2020-12-17 08:00:0015 PID調(diào)節(jié)是比例、積分、微分三者英文的縮寫,是連續(xù)系統(tǒng)中應(yīng)用最為廣泛的一個(gè)調(diào)節(jié)方式。PID調(diào)節(jié)的實(shí)質(zhì)就是根據(jù)輸入的偏差值,按比例、積分、微分的函數(shù)關(guān)系進(jìn)行運(yùn)算,其運(yùn)算結(jié)果用以輸出控制。在實(shí)際應(yīng)用中,根據(jù)被控對(duì)象的特性和控制要求,可靈活地改變PID的結(jié)構(gòu),以充分發(fā)揮計(jì)算機(jī)的作用。
2020-07-13 10:26:181594 pid利用PI控制和PD控制的優(yōu)點(diǎn)組合成的控制。PID運(yùn)算是P、I和D三個(gè)運(yùn)算的總和。
2019-11-29 15:04:299552 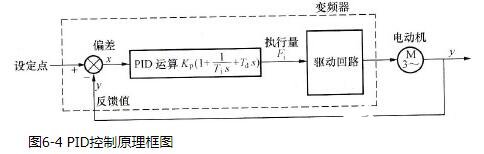
運(yùn)動(dòng)控制器是整個(gè)運(yùn)動(dòng)控制系統(tǒng)的核心,作用是執(zhí)行編寫的程序,通過(guò)采集現(xiàn)場(chǎng)的I/O信號(hào),實(shí)現(xiàn)各種運(yùn)算功能,對(duì)程序流程和I/O設(shè)備進(jìn)行控制,并與操作站和其他現(xiàn)場(chǎng)設(shè)備進(jìn)行通信。
2019-09-18 10:39:124738 DSP來(lái)實(shí)現(xiàn)數(shù)字PID控制器做了重點(diǎn)介紹,DSP的高速運(yùn)算能力從硬件上保證了PID控制策略的實(shí)時(shí)性,對(duì)控制性能要求較高的場(chǎng)合,具有廣闊的應(yīng)用前景。
2019-01-02 16:30:0330 在實(shí)際系統(tǒng)中,PLC控制模擬量可采用PLC自帶的PID過(guò)程控制模塊,但對(duì)要求比較高的場(chǎng)合采用改進(jìn)的PID控制算法,就必須由用戶自己編制PID控制算法,基于這些問(wèn)題的考慮,文中介紹一種由三菱FX2N實(shí)現(xiàn)的增量式PID控制器的設(shè)計(jì)方法。
2018-12-31 08:11:0010763 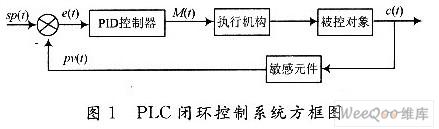
傳統(tǒng)上,工業(yè)機(jī)器人使用復(fù)雜的專有語(yǔ)言編程,對(duì)外人來(lái)說(shuō)是很難的,只有機(jī)器人程序員才能理解。運(yùn)動(dòng)控制器現(xiàn)在應(yīng)用廣泛多樣,通常使用PC庫(kù)或其他專有語(yǔ)言來(lái)編程,而PLC傾向用梯形邏輯來(lái)編程。在今天的自動(dòng)化
2018-03-14 15:08:584822 GForce-200系列PLC能夠進(jìn)行PID控制,其CPU最多可支持8個(gè)PID控制回路。PID是閉環(huán)控制系統(tǒng)中比例-積分-微分控制算法,它可以看作是這三項(xiàng)之和,根據(jù)設(shè)定值與被控對(duì)象實(shí)際值的差值,按PID方式計(jì)算出控制輸出量,使反饋跟隨設(shè)定值變化,因此PID控制是負(fù)反饋閉環(huán)控制。
2018-02-06 18:11:391971 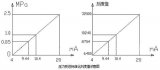
簡(jiǎn)單PLC的運(yùn)算功能包括邏輯運(yùn)算、計(jì)時(shí)和計(jì)數(shù)功能;普通PLC的運(yùn)算功能還包括數(shù)據(jù)移位、比較等運(yùn)算功能;較復(fù)雜運(yùn)算功能有代數(shù)運(yùn)算、數(shù)據(jù)傳送等;大型 PLC中還有模擬量的PID運(yùn)算和其他高級(jí)運(yùn)算功能。
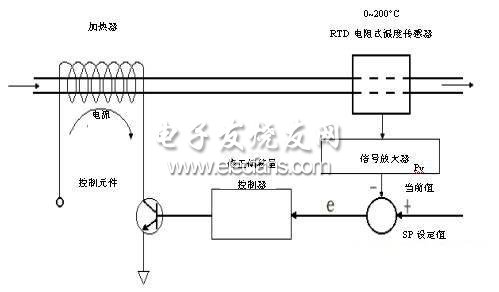
2017-12-11 18:04:454093 控制裝置可以是PLC系統(tǒng),也可以是專用的自動(dòng)化裝置(如運(yùn)動(dòng)控制器、運(yùn)動(dòng)控制卡)。也可以這樣理解:PLC的使用是一種普通的運(yùn)動(dòng)控制裝置。運(yùn)動(dòng)控制器是一種特殊的PLC,專職用于運(yùn)動(dòng)控制。
2017-10-19 17:41:1826723 利用Haiwell PLC的易用的通信功能:標(biāo)準(zhǔn)配置2個(gè)通信口,1個(gè)RS232通信口,1個(gè)RS485通信口。用Haiwell PLC的RS232口與運(yùn)動(dòng)控制器的RS232口通信,Haiwell PLC作為通信主站,運(yùn)動(dòng)控制器作為通信從站,便捷經(jīng)濟(jì)的實(shí)現(xiàn)運(yùn)動(dòng)控制器的IO擴(kuò)展。
2017-10-09 11:33:271 灰色預(yù)測(cè)PID控制的氣缸運(yùn)動(dòng)系統(tǒng)設(shè)計(jì)_石柱
2017-03-19 19:07:041 基于S7_300PLC的Fuzzy_PID控制恒壓供水系統(tǒng)設(shè)計(jì)_門順治
2017-01-19 21:54:2418 PID在PLC中的實(shí)現(xiàn),感興趣的發(fā)燒友們可以看一看。
2016-08-09 16:09:359 基于模糊PID的纏繞機(jī)同步運(yùn)動(dòng)控制及仿真-2006。
2016-04-05 11:23:4319 PID控制器及其智能化方法探討-1999
2016-03-31 17:46:3313 如何使用S7-200PLC的PID控制。
2015-12-08 17:23:458 PLC實(shí)現(xiàn)智能PID控制,系統(tǒng)控制原理圖,程序案例。
2015-10-30 17:07:5114 PID控制原理和特點(diǎn) 工程實(shí)際中,應(yīng)用最為廣泛調(diào)節(jié)器控制規(guī)律為比例、積分、微分控制,簡(jiǎn)稱PID控制,又稱PID調(diào)節(jié)。PID控制器問(wèn)世至今已有近70年歷史,它以其結(jié)構(gòu)簡(jiǎn)單、穩(wěn)定性好、工
2012-09-09 09:45:35194063 
PLC 控制系統(tǒng)最初被應(yīng)用于對(duì)離散量的控制,隨著技術(shù)的發(fā)展和實(shí)際工程應(yīng)用的需求,PLC 控制系統(tǒng)也開始用于對(duì)連續(xù)變量的控制。結(jié)合實(shí)際工程,對(duì)PID 模塊指令在Allen2Bradley 公司的PLC 產(chǎn)品中
2012-01-16 10:59:2979 提出一種將模糊控制與傳統(tǒng)的PID控制相結(jié)合的方法,應(yīng)用到足球機(jī)器人的運(yùn)動(dòng)控制系統(tǒng)中。針對(duì)足球機(jī)器人運(yùn)動(dòng)控制中的重點(diǎn)問(wèn)題,著重提出了基于模糊控制的動(dòng)態(tài)調(diào)整PID控制器的3個(gè)參數(shù)
2011-11-04 11:21:3460 現(xiàn)在國(guó)內(nèi)外一些著名的品牌廠家?guī)缀跽摂嗟恼麄€(gè)工業(yè)自動(dòng)化控制領(lǐng)域,如:國(guó)外的有艾默生、西門子;國(guó)內(nèi)的有:浙大中控、和利時(shí)等,那么在這些控制系統(tǒng)中最常規(guī)的 PID 控制是怎么實(shí)
2011-09-02 11:41:475466 由51單片機(jī)組成的數(shù)字控制系統(tǒng)控制中,PID控制器是通過(guò)PID控制算法實(shí)現(xiàn)的。51單片機(jī)通 過(guò)AD對(duì)信號(hào)進(jìn)行采集,變成數(shù)字信號(hào),再在單片機(jī)中通過(guò)算法實(shí)現(xiàn)PID運(yùn)算,再通過(guò)DA把控制量 反饋回控制源。從而實(shí)現(xiàn)對(duì)系統(tǒng)的伺服控制。
2011-03-16 15:26:36153 專家PID控制和模糊PID控制
專家PID控制(Expert Control)的實(shí)質(zhì)是基于受控對(duì)象和控制規(guī)律的各種知識(shí),并以智能的方式利用這些知識(shí)來(lái)設(shè)計(jì)控制器。
2010-05-04 15:51:4698 提出一種基于PLC 的仿人智能PID 控制策略,給出了程序流程圖和梯形圖,并將其應(yīng)用于試驗(yàn)電爐的溫度控制系統(tǒng)中。實(shí)踐表明該方法對(duì)于時(shí)變
2009-09-15 09:33:4923 本文簡(jiǎn)要分析了靜止無(wú)功補(bǔ)償器(Static Var Compensator,SVC)控制系統(tǒng)的組成和補(bǔ)償原理。針對(duì)SVC 電壓調(diào)節(jié)單元,介紹了基于西門子S7-200PLC 閉環(huán)控制系統(tǒng)中 PID 數(shù)字控制器的原理及PID
2009-09-01 16:33:0331 通過(guò)活性白灰回轉(zhuǎn)窯PLC 生產(chǎn)線工藝分析,對(duì)系統(tǒng)硬件進(jìn)行了配置,分析設(shè)計(jì)了模糊PID 控制器,并給出了自適應(yīng)模糊推理與優(yōu)化設(shè)計(jì)方案,經(jīng)編程在PLC 環(huán)境下實(shí)現(xiàn),經(jīng)過(guò)運(yùn)行效果
2009-08-24 15:07:0317 為了改善工業(yè)控制系統(tǒng)的動(dòng)態(tài)調(diào)節(jié)品質(zhì),運(yùn)用BP 神經(jīng)網(wǎng)絡(luò)控制算法設(shè)計(jì)了一種神經(jīng)網(wǎng)絡(luò)PID 控制器,并給出了基于西門子PLC 的神經(jīng)網(wǎng)絡(luò)PID 控制器的實(shí)現(xiàn)方法,仿真和實(shí)驗(yàn)結(jié)果表明
2009-08-10 11:12:3242 本文并初步探討了汽車運(yùn)動(dòng)的控制算法,包括橫向控制算法和縱向控制算法, 并建立起汽車運(yùn)動(dòng)控制系統(tǒng)的簡(jiǎn)化模型。在MATLAB 環(huán)境下對(duì)汽車運(yùn)動(dòng)控制系統(tǒng)進(jìn)行PID 和根軌跡的設(shè)計(jì)和校正
2009-08-10 10:23:3860 基于PLC白灰回轉(zhuǎn)窯的模糊PID控制系統(tǒng)
通過(guò)活性白灰回轉(zhuǎn)窯PLC生產(chǎn)線工藝分析,對(duì)系統(tǒng)硬件進(jìn)行了配置,分析設(shè)計(jì)了模糊PID控制器,并給
2009-06-20 14:41:07848 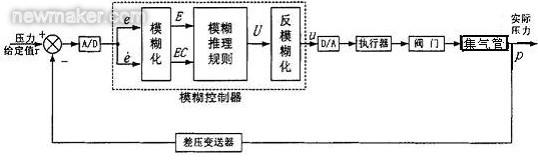
擴(kuò)展PLC控制系統(tǒng)I/O點(diǎn)的方法探討
可編程序控制器(Programmable Logic Controller)簡(jiǎn)稱為PLC,它具有可靠性高、抗干擾能力強(qiáng)等突出優(yōu)點(diǎn),因而廣
2009-06-17 14:24:001034 
臺(tái)達(dá)運(yùn)動(dòng)控制型PLC應(yīng)用技術(shù)
本文簡(jiǎn)述臺(tái)達(dá)DVP20PM運(yùn)動(dòng)控制型PLC的硬件及軟件結(jié)構(gòu),并介紹在應(yīng)用中的方法及特點(diǎn)。 關(guān)鍵詞:PLC 運(yùn)
2009-06-13 17:04:072851 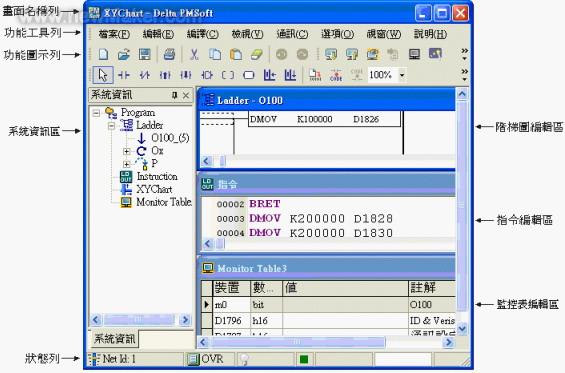
基于PLC白灰回轉(zhuǎn)窯的模糊PID控制系統(tǒng)
摘 要:通過(guò)活性白灰回轉(zhuǎn)窯PLC生產(chǎn)線工藝分析,對(duì)系統(tǒng)硬件進(jìn)行了配置,分析設(shè)計(jì)了模糊PID控
2009-06-12 15:28:312855 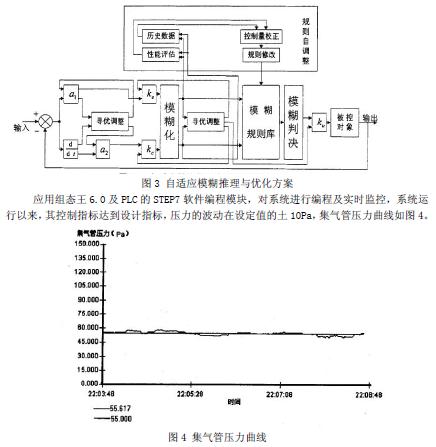
三菱PLC QCPU(Q系列)/QnACPU編程手冊(cè) (PID控制指令篇)
1.1 PID處理方法2.PID控制的系統(tǒng)構(gòu)成2.1 適用PLC CPU3.PID控制規(guī)格3.1 不完全微分PID控制3.1.1 性能規(guī)格3.1.2 PID運(yùn)算
2008-11-21 11:24:0630 三菱q系列plc編程手冊(cè):1.1 PID處理方法2.PID控制的系統(tǒng)構(gòu)成2.1 適用PLC CPU3.PID控制規(guī)格3.1 不完全微分PID控制3.1.1 性能規(guī)格3.1.2 PID運(yùn)算塊圖表及運(yùn)算表達(dá)式.3.1.3 PID
2008-11-21 11:16:441328  電子發(fā)燒友App
電子發(fā)燒友App











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論