 電子發燒友App
電子發燒友App


單片機具有可靠性高、功耗低、擴展靈活、體積小、價格低和使用方便等優點,廣泛應用于儀器儀表、專用設備智能化管理及過程控制等領域,有效地提高了控制質量與經濟效益。本設計選用TI公司的16位超低功耗混合型微處理器MSP430F149(見圖3)作為核心控制器,它的主要特點是:
(1)低電壓、超低功耗
該單片機的電源電壓采用1.8V~3.6V低電壓,RAM數據保持方式下耗電僅0.1μA,在2.2V、1MHz主頻的活動模式時工作電流為280μA,I/O輸入端口的漏電流最大僅50nA。
(2)強大的處理能力
該單片機為16位的精簡指令集(RISC)結構,具有豐富的尋址方式(7種源操作數尋址、4種目的操作數尋址)、簡潔的27條內核指令以及大量的模擬指令;大量的寄存器以及片內數據存儲器都可參加多種運算,還有高效的查表處理方法及較高的處理速度,一個時鐘周期可以執行一條指令,使單片機在8MHz晶振工作時,指令速度可達8MIPS。
(3)豐富的片上外圍模塊
該單片機集成了較豐富的片內外設:模擬比較器A、定時器A、定時器B、串行通信接口USART0和USART1、硬件乘法器、12位ADC、端口1~6、看門狗等。
(4)系統工作穩定
該單片機在上電復位后,首先由DCOCLK啟動CPU,保證程序從正確的位置開始執行,同時也保證了晶體振蕩器有足夠的起振和穩定時間;之后通過軟件可設置適當的寄存器的控制位來確定最后的系統時鐘頻率。在CPU運行中,如果MCLK發生故障,DCO會自動啟動,以確保系統正常工作。如果程序跑飛,可以用看門狗將其復位。
(5)方便高效的開發環境
MSP430F149片內有JTAG調試接口,還有可電擦寫的FLASH存儲器,因此采用先通過JTAG接口下載程序到FLASH內,再由JTAG接口控制程序運行、讀取片內CPU狀態,以及存儲器內容等信息供設計者調試。由于單片機可支持串行在線編程,使開發變得更加簡便,并且開發的仿真器價格低廉,不需要昂貴的編程器。
無線數傳電路的設計
數據處理與無線數傳電路設計主要包括主控制器電路、傾角傳感器接口電路、無線數傳模塊接口電路、電源電路等。基本工作原理是:系統通上電后,主控制器控制傾角傳感器按固定間隔檢測火箭炮車體姿態,將接收到的檢測結果運算處理,計算每個千斤頂的調整量,再通過無線數傳模塊發送給操縱指示器。
(1)主控制器及接口電路設計
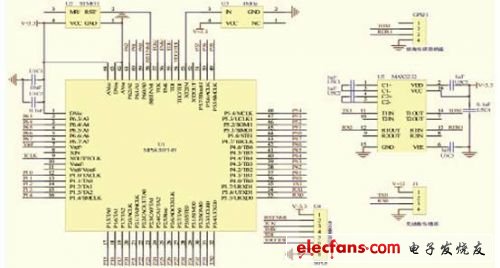
主控器采用MSP430F149單片機,串口1經TTL-RS232電平轉換接傾角傳感器,用于接收傳感器輸出數據,串口2 TTL電平接無線數傳模塊,發送車體縱橫向傾斜角度和調整角度至操縱指示器。主控制器及接口電路如圖3所示。
?
圖3 主控器及接口電路圖
(2)電源電路設計
電源采用12V/1000mAh的鋰電池,直接為傾角傳感器供電,再經兩路DC-DC轉換,分別轉換至9V和3.3V,9V電源為無線數傳模塊供電,3.3V為主控制器及接口電路供電,充電電路采用LM317芯片,恒流方式充電。電源電路見圖4所示。
(3)無線數傳模塊的選用
在一些多測試點的系統中,伴隨傳感器而來的是大量數據線纜。眾多的線纜不僅帶來布線的復雜不便,而且存在著短路、短線隱患,成本高,易老化,還給系統的調試和維護增加了難度。另外,在一些特殊的應用場合,需要將傳感器放置在有危險的封閉環境中進行工作,試圖通過連線的方法得到傳感器的信號顯然是有一定難度的。而采用無線方式來實現信號的傳送,可以解決這一問題。相比有線傳輸,無線傳輸具有不占據空間、沒有布線要求、成本低、可靠性高、維護方便及傳輸中的干擾較少等優點,這也在一定程度上提高了傳輸的可靠性。

?
圖4 電源電路圖
根據實際情況,本文采用ZT-TR43F無線數傳模塊,它是一款無線收發一體的低功耗通信模塊。該模塊的技術指標如下:①載波頻率為433MHz,工作頻率為428MHz~435MHz;②最大發射功率5mW,接收靈敏度﹣105dBm;③采用FSK調制,采用前向信道糾錯編碼,抗干擾能力強;④有八個工作信道可供選擇;⑤傳輸速率9.6kbps;⑥降低噪聲放大器LNA、功率放大器PA、壓空振蕩器VCO等大部分功能集成在芯片內,外圍電路簡單易于開發。采用該無線數傳模塊,可以使車體調平裝置滿足某型火箭炮調平時的無線數傳要求:①適當的通信距離,一般以不超過30m為宜,通信功率過大使通信距離過遠,會造成炮與炮之間相互干擾;②較強的抗干擾能力,系統在較強的外界干擾中也能正常工作;③較低的功耗,該裝置野外應用,無固定供電電源,只能靠電池維持系統運行。
無線模塊ZT-TR43F與單片機接口提供了RS232/TTL/RS485三種接口方式,本系統采用TTL接口方式,方便與MSP430F149單片機的接口。其中MSP430單片機的RXD、TXD口分別與無線模塊的TXD、RXD口相接,地線與地線相接。
考慮到多門火箭炮同時調平時,有多個調平裝置同時工作,為防止之間相互干擾,采取不同的通信信道或不同編碼方式識別,每個裝置上帶有撥碼盤,通過撥碼盤設置各自的通信信道或識別碼。
調整角度的計算
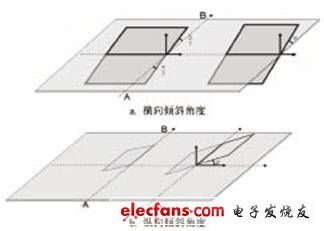
主控制器接收到車體的縱橫向傾斜角度后,需要計算每個千斤頂相對調整的角度,角度計算的幾何關系見圖5。
?
圖5 角度計算關系圖
如圖5所示,車體水平傾斜角度可反映在橫向和縱向兩個方向,圖5中a和b分別為橫向和縱向傾斜角度,設α和β為傾角傳感器得出的橫向和縱向角度。若α大于0,則A端千斤頂打高,B端千斤頂打低。兩端千斤頂各位移約為α/2乘以AB端點間隔的一半的距離,然后調整千斤頂直到橫向水準氣泡居中。若β大于0,則A端和B端同時打低,若β小于0,則A端和B端同時打高。打高過程中調整千斤頂直到縱向水準氣泡居中。










 工商網監
工商網監
評論