 電子發(fā)燒友App
電子發(fā)燒友App


智能移動加濕器紅外避障電路模塊設計
- 單片機(614606)
- 控制電路(134144)
- 智能硬件(106010)


相關(guān)推薦
紅外避障模塊是一種傳感器嗎?
了紅外光線時,接收器就會檢測到并發(fā)出警報或者控制機器停止運動,從而避免了碰撞和損壞。紅外避障模塊具有多種應用場景,例如自動化生產(chǎn)線、智能家居、無人駕駛汽車等等。在自
2023-09-08 08:30:01 229
229
229
如何制作一個智能尋路+避障的小車?
本項目利用D1 Dock Pro的USB拍照程序,結(jié)合L298N電機驅(qū)動模塊和紅外探測循跡光電傳感器模塊,制作了一個擁有智能尋路+避障功能的小車。該項目為“玄鐵杯第二屆RISC-V應用創(chuàng)新大賽”活動中的優(yōu)秀作品。
2022-12-22 14:27:082018
2018基于stm32的智能小車作品(循跡避障藍牙)(下)
基于stm32的智能小車作品(循跡避障藍牙)(下)五、避障小車制作1.超聲波模塊接線2.工作原理3. 超聲波避障程序六、藍牙遙控小車制作1.模塊介紹+接線3.藍牙遙控小車程序4.藍牙串口APP總結(jié)
2021-12-28 19:03:17 72
72
72基于51單片機的避障小車
:51單片機、LCD1602、超聲波避障、紅外避障題目擴展:小車、避障資料預覽效果圖:總體資料:原理圖:軟件設計流程:系統(tǒng)框圖:本設計以STC89C52單片機為核心控制器,加上其他的模塊一起組成無人車防碰撞控制的整個系統(tǒng),其中包
2021-11-23 16:36:3765
65基于stm32單片機的紅外避障及循跡小車
效果圖:總體資料:原理圖:軟件設計流程:系統(tǒng)框圖:本設計以STM32F103單片機為核心控制器,加上其他的模塊一起組成紅外避障的整個系統(tǒng),其中包含中控部分、輸入部分和輸出部分。中控部分采用了STM32F103單片
2021-11-19 09:21:08226
226基于51單片機超聲波紅外避障語音導盲儀設計(全套資料)
單片機的超聲波紅外避障語音導盲儀設計-(電路圖+程序源碼+論文)本系統(tǒng)采用STC89C52單片機+4位高亮白色LED燈+紅外避障傳感器電路+超聲波電路+光敏電阻模塊+語音報警電路+震動電路+液晶1602電路+電源電路設計而成。1、通過紅外避障傳感器或者超聲波模塊檢測前方障礙物,如果檢測到障礙物,則
2021-11-05 09:36:0034
34基于單片機的智能小車設計(紅外避障)之歐陽術(shù)創(chuàng)編
基于單片機的智能小車設計(紅外避障)之歐陽術(shù)創(chuàng)編(單片機論文)-該文檔為基于單片機的智能小車設計(紅外避障)之歐陽術(shù)創(chuàng)編簡介資料,講解的還不錯,感興趣的可以下載看看…………………………
2021-07-22 13:42:0322
22基于STM32單片機的尋跡避障車設計
本設計由STM32F103C8T6單片機核心板電路+撥動開關(guān)電路+2路按鍵電路+2路紅外對管電路+2路紅外避障模塊電路+L298N電機控制電路組成。 1、通過撥動開關(guān)選擇工作模式,即尋跡模式和避障
2020-11-02 10:25:354632
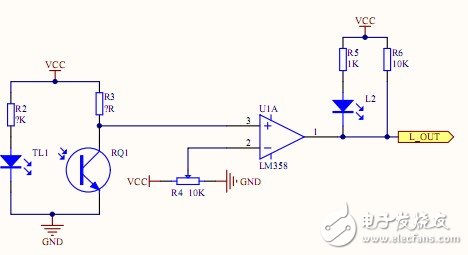
4632紅外避障傳感器原理圖_紅外傳感器避障模塊電路圖
紅外避障主要是以紅外測距傳感器為主。紅外測距都是采用三角測距的原理。紅外發(fā)射器按照一定角度發(fā)射紅外光束,遇到物體之后,光會反向回來,檢測到反射光之后,通過結(jié)構(gòu)上的幾何三角關(guān)系,就可以計算出物體距離D。
2019-09-12 09:12:2995091
95091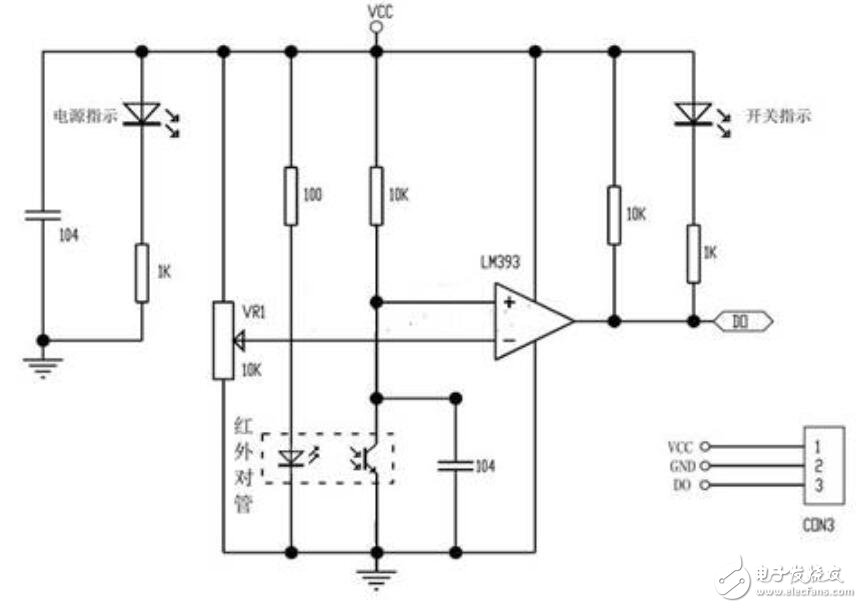
使用樹莓派設計智能小車教程之樹莓派紅外避障原理詳細資料說明
用紅外光電傳感器,探測到物體即輸出脈沖,輸入到單片機中處理一下,再對電機驅(qū)動模塊進行控制,實現(xiàn)壁障的功能,這樣的避障小車又稱為簡單的避障機器人。
2019-06-25 08:00:0022
22紅外光電避障傳感器模塊的資料合集免費下載
本文檔的主要內(nèi)容詳細介紹的是E18-D80NK紅外光電避障傳感器模塊的資料合集免費下載包括了:仿真例程人體紅外熱釋感應模塊HC-SR501參考例程,紅外光電模塊E18-D80K說明文檔,紅外光電模塊E18-D80NK的電路原理圖及應用電路合集,及外形圖。
2019-05-30 08:00:0098
98智能尋跡避障小車避障系統(tǒng)設計的資料說明
該項目的主要內(nèi)容是:在智能尋跡避障小車尋跡系統(tǒng)上擴展避障、報警等電路模塊,然后運用C語言對這些功能模塊電路進行編程,使智能尋跡避障小車在行進過程中,能對正前方的障礙物自動完成避障功能,并且遇障礙能夠
2019-04-16 08:00:0015
15怎樣制作避障小車
本項目是在 PVCBOT-A型 基礎平臺車——BEAM小車的基礎上,加裝了避障傳感器以及控制電路,組成了一臺具體有避障功能的小車。而這個所謂避障小車,實際上就是和 PVCBOT-1號 機器人類似的避
2018-09-18 09:35:0018002
18002基于DSP的自動避障小車的設計方案
外界環(huán)境,在復雜環(huán)境中自主移動并完成避障,一般采用超聲波、紅外、激光、CCD等傳感器設計。由于紅外傳感器探測視角小。方向性強,測量精度高,價格便宜,而且可在夜間工作,因此紅外傳感器作為視覺應用于移動機器人避障。
2017-11-02 11:00:124
4




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論