 電子發燒友App
電子發燒友App


電子秤設計電路圖(一)
工作原理
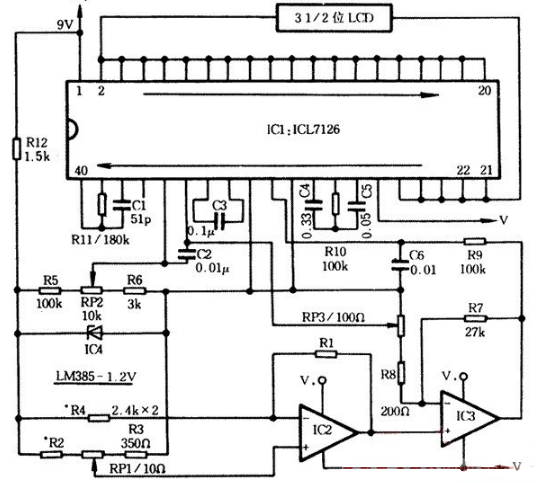
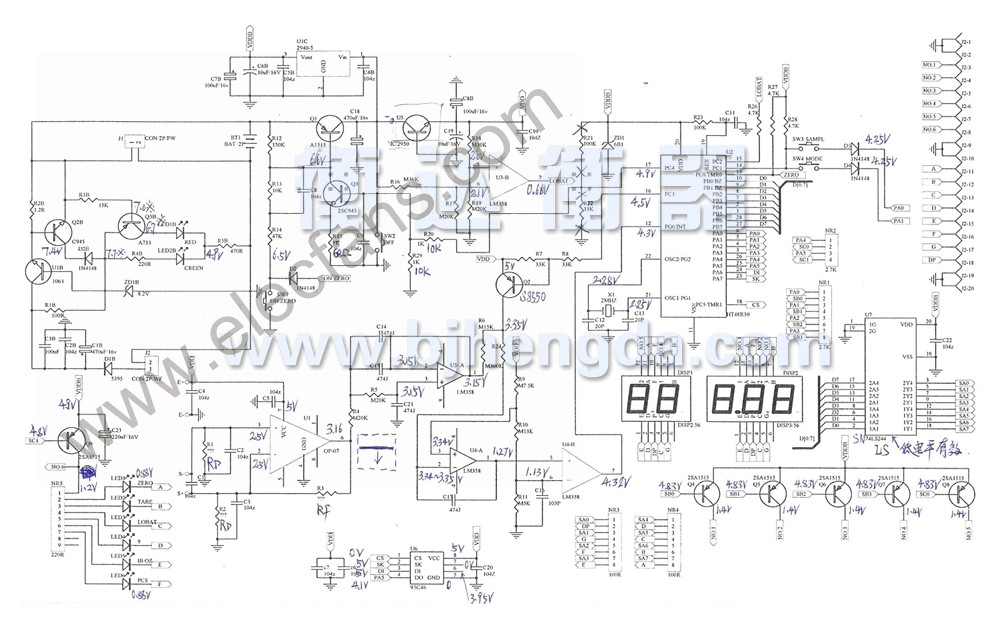
數顯電子秤電路原理如圖所示,其主要部分為電阻應變式傳感器R1及IC2、IC3組成的測量放大電路,和IC1及外圍元件組成的數顯面板表。傳感器R1采用E350~ZAA箔式電阻應變片,其常態阻值為350O。測量電路將R1產生的電阻應變量轉換成電壓信號輸出。IC3將經轉換后的弱電壓信號進行放大,作為A/D轉換器的模擬電壓輸入。IC4提供l、22V基準電壓,它同時經R5、R6及RP2分壓后作為A/D轉換器的參考電壓。3-1/2位A/D,轉換器ICL7126的參考電壓輸人正端,由RP2中間觸頭引入,負端則由RP3的中間觸頭引入。兩端參考電壓可對傳感器非線性誤差進行適量補償。
元件選擇
1、IC1選用ICL7126集成塊;IC2、IC3選用高精度低溫標精密運放OP-07;IC4選用LM385-1、2V集成塊。
2、傳感器RI選用E350-ZAA箔式電阻應變片,其常態阻值為350O。
3、各電阻元件宜選用精密金屬膜電阻。
4、RPI選用精密多圈電位器,RP2、RP3經調試后可分別用精密金屬膜電阻代替。
5、電容中C1選用云母電容或瓷介電容。
制作與調試
該數顯電子秤外形可參考圖中形式。其中形變鋼件可用普通鋼鋸條制作,其方法是:首先將鋸齒打磨平整,再將鋸條加熱至微紅,趁熱加工成“U”形,并在對應位置鉆孔,以便以后安裝。然后再將其加熱至呈橙紅色(得七八百攝氏度),迅速放人冷水中淬火,以提高硬度和強度,最后進行表面處理工藝。秤鉤可用強力膠粘接于鋼件底部。應變片則用專用應變膠粘劑粘接于鋼件變形最大的部位(內側正中)。這時其受力變化與阻值變化剛好相反。拎環應用活動鏈條與秤體連接,以便使用時秤體能自由下垂,同時拎環還應與秤鉤在同一垂線上。
在調試過程中,應準備1千克及2千克標準砝碼各一,其過程如下:
1、首先在秤體自然下垂已無負載時調整RP1,使顯示器準確顯示零。
2、再調整RP2,使秤體承擔滿量程重量(本電路選滿量程為2千克)時顯示滿量程值。
3、然后在秤鉤下懸掛1千克的標準砝碼,觀察顯示器是否顯示1、000,如有偏差,可調整RP3值,使之準確顯示1、000。
4、重新進行2、3步驟,使之均滿足要求為止。
5、最后準確測量RP2、RP3電阻值,并用固定精密電阻予以代替。
RP1可引出表外調整。測量前先調整RP1,使顯示器回零。
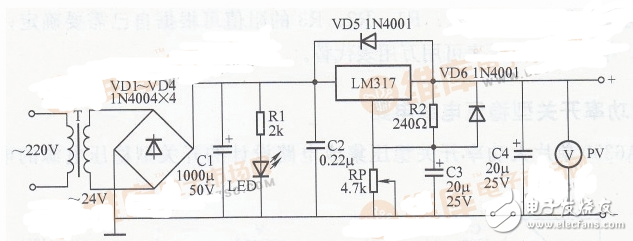
電子秤設計電路圖(二)
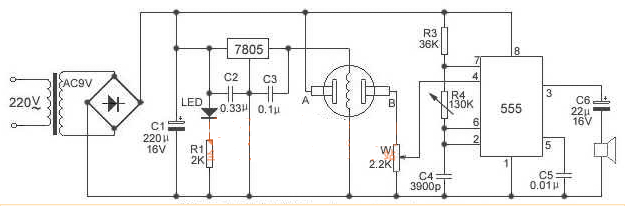
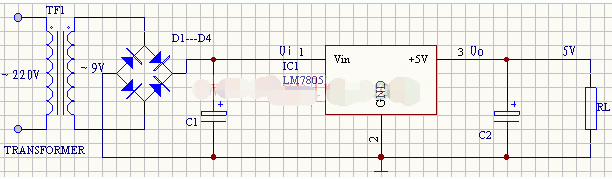
該電子秤電路如圖所示。主集成城MC14433為A/D轉換集成塊,4511為LED顯示驅動集成塊1413為位選片子,1403提供主集成電路一穩定比較電壓,7650為斬波穩零單片集成運算放大器,放大傳感器輸出的電壓信號。傳感器用BLR型拉壓式傳感器,圖中RA、RB、RC、RD為傳感器中應變電阻。穩壓電路7805向整個電路提供5V電壓,7805的輸人電壓在8-15V時正常工作。也可用交流220V降壓、整流、濾波后,提供給儀器使用。
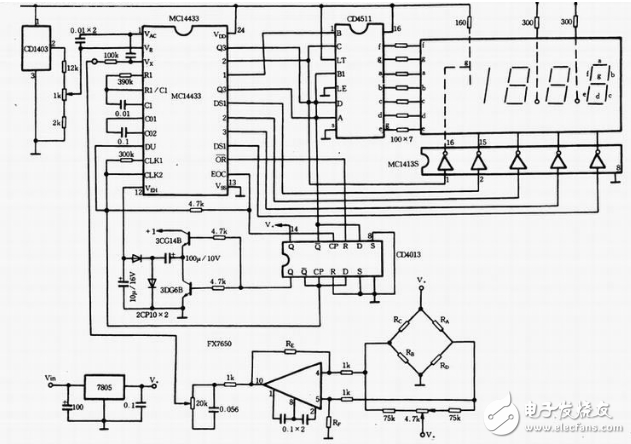
由于儀器用于精度較高場合,因此14433、1403、7650外圍的阻容元件,應選用低溫度系數、熱穩定性好的,電阻應選用RJ金屬膜電阻。7650兩支1k的電阻差值和RE、RF兩電阻的差值應小于l%,否則秤裝完后有可能調零時調不到零點。RE、RF阻值的取值范圍為幾十k到幾百k之間,視所選用的傳感器大小而定。傳感器量程小,如200kg,阻值就選小一些,量程大,如2000kg,阻值就選大一些。如要用小數點表示,小數點電阻接V+,用小于200kg量程的傳感器時,接右邊數第一位前小數點,傳感器量程在200ks至2000kg之間時,小數點全不亮,最小分辨率為1kg。
電子秤設計電路圖(三)
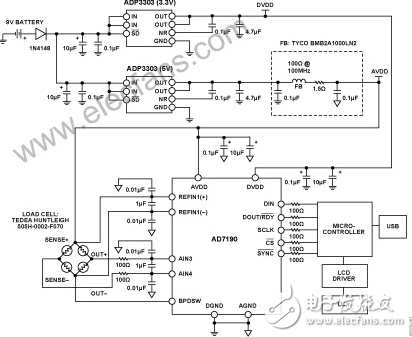
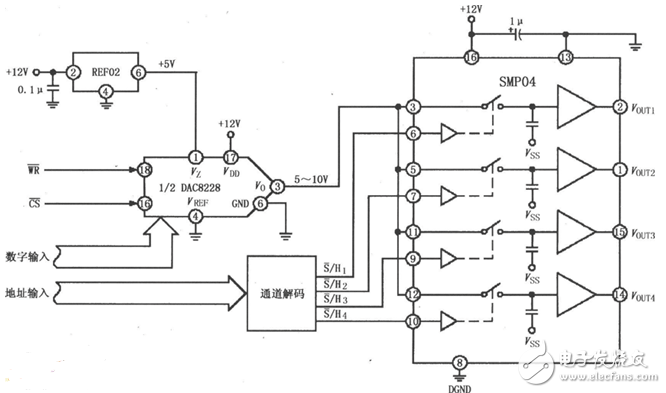
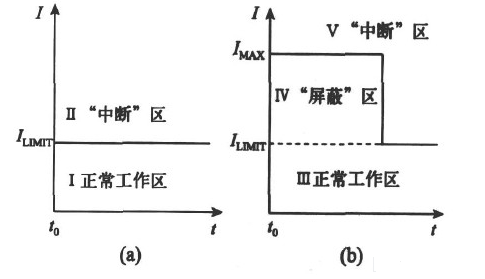
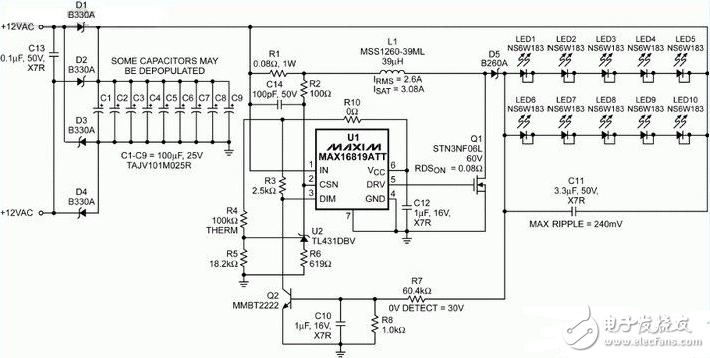
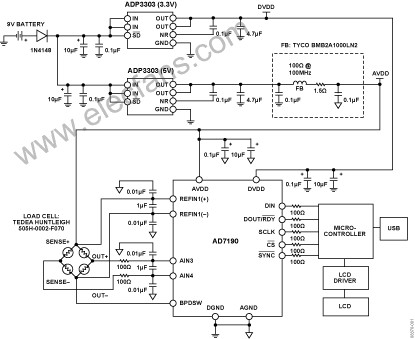
該電路是一個電子秤系統,它使用AD7190,超低噪聲,與內部PGA的24位Σ-Δ型ADC。在AD7190簡化了電子秤的設計,因為該系統的大部分組成部分,包括在芯片上。
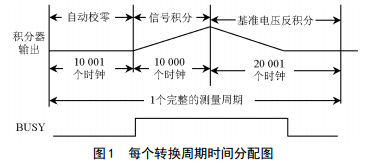
在AD7190保持了完整的輸出數據率范圍從4.7赫茲的良好表現,至4.8千赫,這使得它能夠被用來在權衡,在更高的速度隨著經營規模的低速稱重系統,如圖
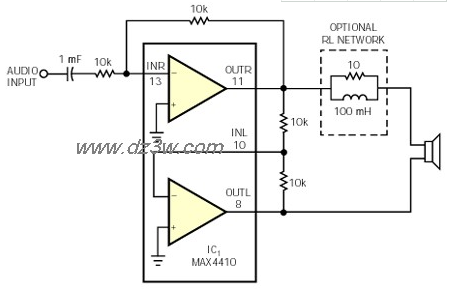
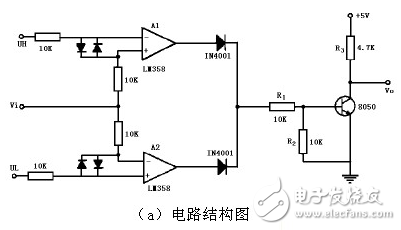
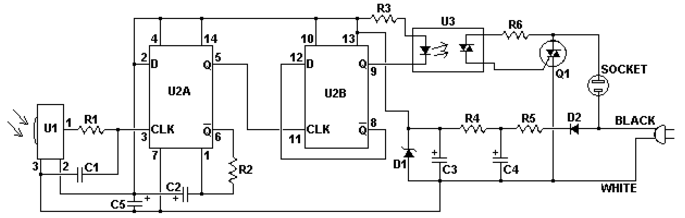
電子秤設計電路圖(四)
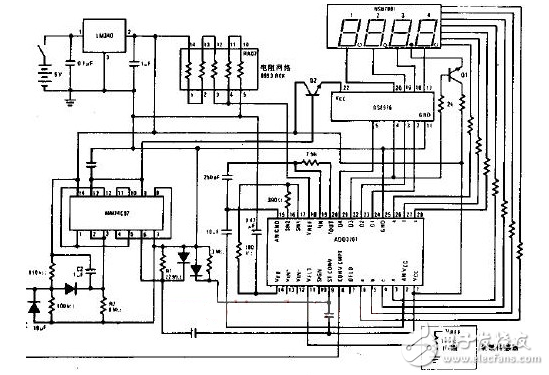
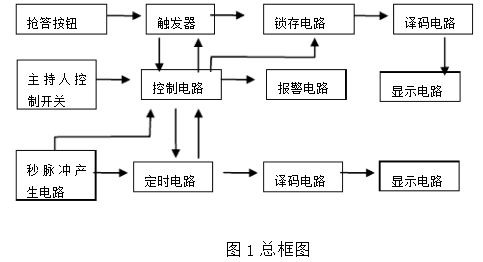
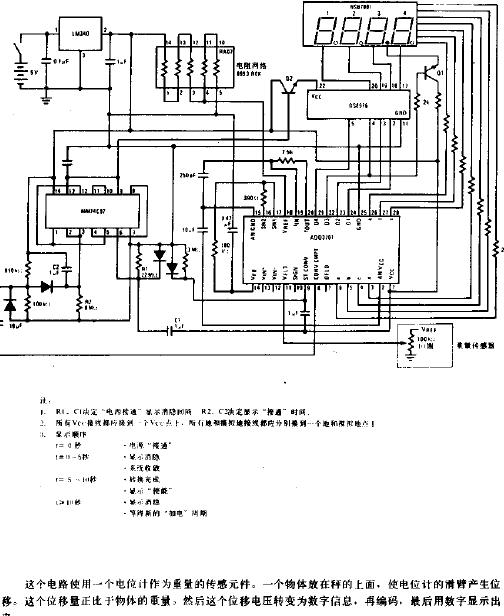
這個電路使用一個電位計作為重量的傳感元件。一個物體放在稱的上面,是電位計的滑臂產生位移。這個位移正比于物體的重量。然后這個位移電壓轉變為數字信息,再編碼,最后用數字電壓表顯示出來。
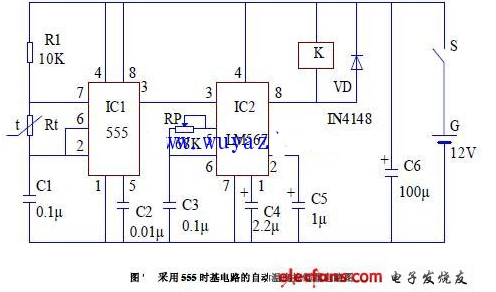
電子秤設計電路圖(五)
家用電子秤的制作原理
工作原理
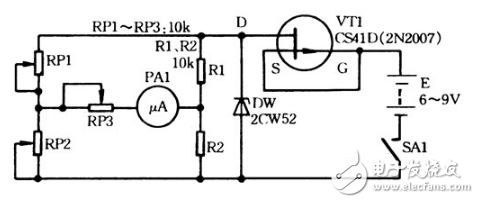
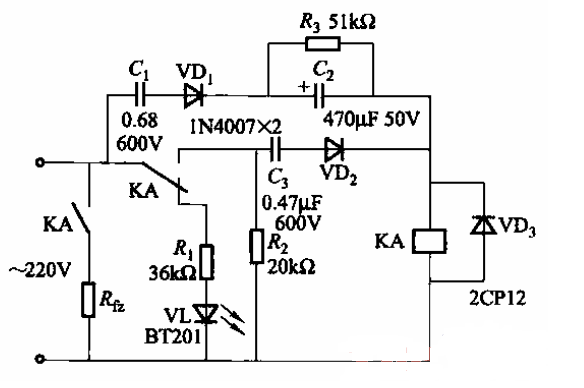
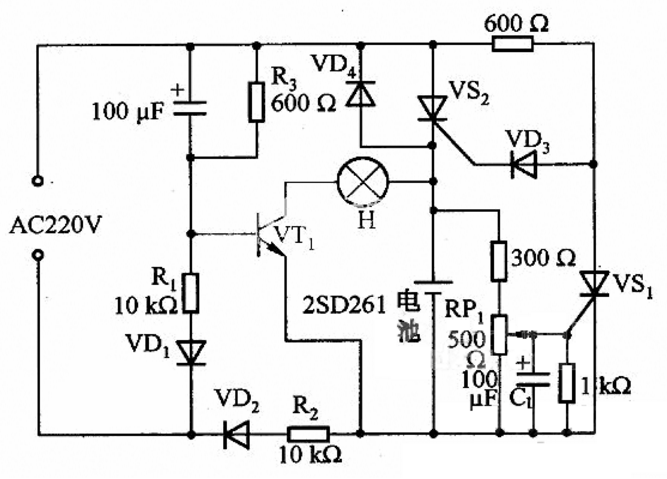
該文介紹的電子秤,其基本原理與普通的彈簧秤相似,即彈簧的應變正比于物體的重量。但是,它與普通彈簧秤結構不同,測量指示采用電子線路。電子秤的電原理圖如圖所示,它由電阻PR1、RP2、R1、R2組成測量橋,在橋的對角線上經電阻RP3接指示微安表PA1;.測量橋的電源由參數穩壓器Dw、VT1穩定。滑動式線性可變電阻器RP2作為物體重量彈性應變的傳感器。物體的重量不同,彈簧壓縮應變的程度個同,通過機械聯動,帶動電位器RP2滑動,測量橋中的RP2阻值變化,電橋不平衡程度不同,指針式電表指示的數值也不問。無負荷重量時,滑動電阻器在測量橋中引入的阻值最大;滿測程(最大可測重量)時,RP2引入的阻值最小,指示達滿刻度。
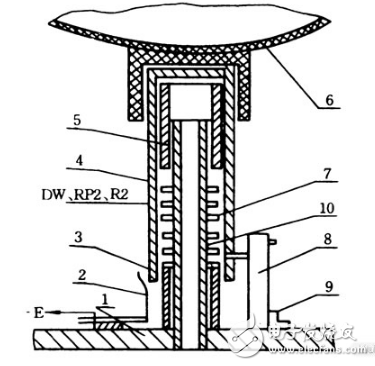
電子秤的機械部分如圖所示,在金屬基板1上固定一個導向支柱2,在支柱上套上社套3,襯套支承彈簧7,而在彈簧上罩上壓套5,在壓套上再套上一個護筒4,在護筒上放置帶底座的塑料容器盤6。測量橋中的滑動電阻器8(RP2)用彎角9固定在底座1上,RP2的滑動臂伸入可移動的護筒孔內。結構的高度與彈簧的剛性及選用的滑動電阻器有關,彈簧的選取原則是:在最大測量物體重量時,彈簧的壓縮相對于滑動電阻器RP2滑臂行程長度的50-6d%左右。為了在測重時自動接通電源,在底板上固定一個用電磁繼電器彈簧片改制的接觸片10,與護簡之間的距離為0.5-lmm。
電子秤的電子線路部分,除滑動電位器RP莉和指示電表PAl外,安裝在圖中所示的印制線路板上。
電子秤設計電路圖(六)
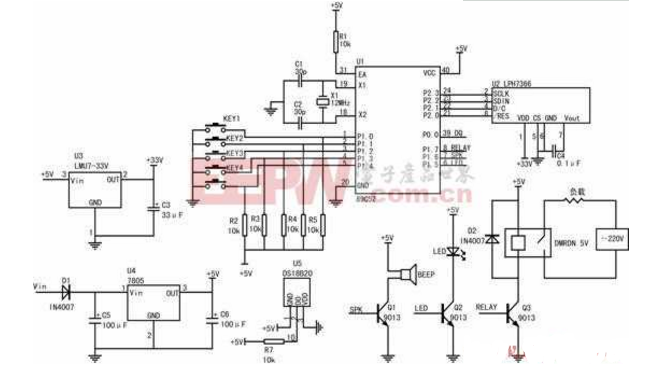
用單片機技術制作的智能電子秤電路板組件與稱重傳感器配合即可進行物體的稱量。現將本款稱重傳感器的技術參數及智能電子秤電路板組件介紹如下。
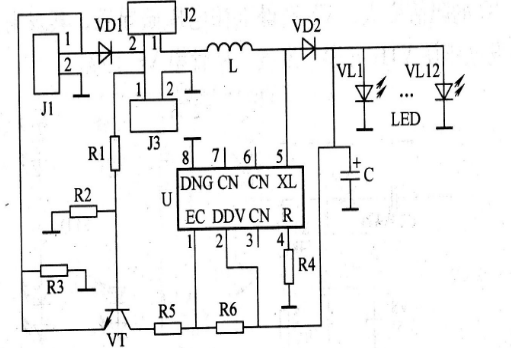
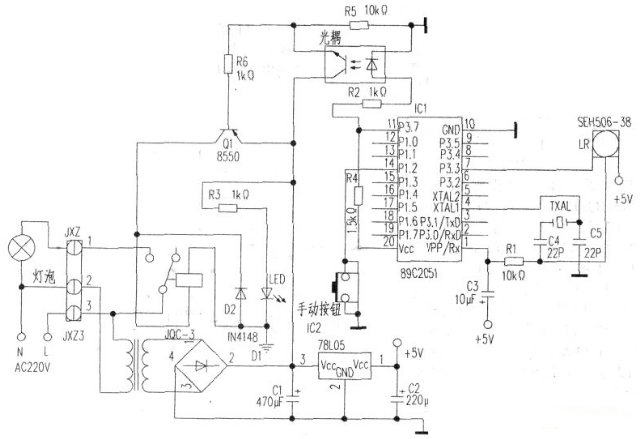
電路原理
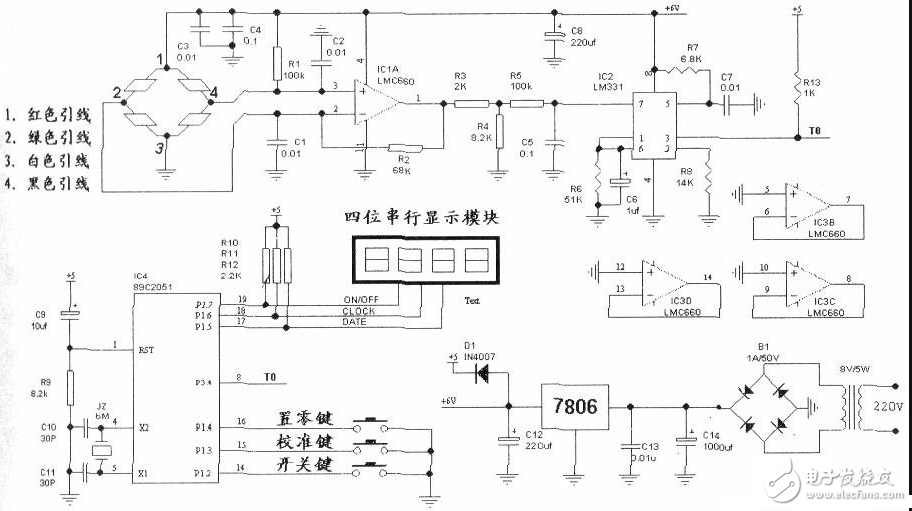
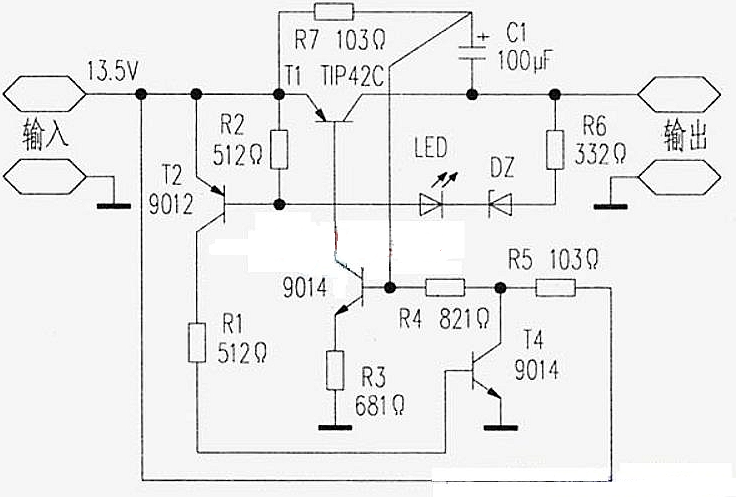
下圖電路中,傳感器放大電路選用了CMOS四運放LMC660AIM,具有極低的輸入偏置電流(典型值為2fA)和高達126dB的電壓增益、單電源供電,很適合作為稱重傳感器的放大電路。本電路只使用了四運放中的一只即IC1A,其他三只運放為防止干擾將其接成電壓跟隨器形式,并將其同相輸入端接地。
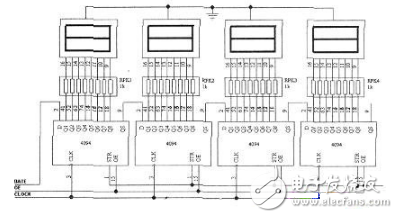
顯示模塊也可由常用的數字電路CD4094構成,電路如下圖所示。
IC1A接成差動輸入形式對稱重傳感器橋路輸出的信號進行放大,R2為運放的反饋電阻、決定著該級放大器的電壓增益。Cl、C2、C3、C4均為濾波電容,Cl、C2可以濾除傳感器輸出信號中的高頻干擾,C3、C4濾除傳感器供電電源中的干擾。本電路中A/D轉換部分由于對速度要求不高,同時為降低成本,選用了壓頻轉換集成電路LM331,它具有外圍電路簡單,線形度好的優點。在0-5V輸入時其輸出對應頻率為0-l0kHz。
單片機的TO口在計數器模式下以1秒為時間段計數LM331的輸出脈沖,計數結果便為該次A/D轉換的值。單片機選用ATMEL公司的89C2051,其內部程序空間為2K能滿足智能電子稱的編程要求。顯示部分采用了四位串行顯示模塊,它由專用的集成電路推動四位數碼管,有三個輸入接口,即CLOCK-時鐘信號.DATE-數據信號,ON/OFF-顯示禁止信號。數據在時鐘上升沿送人顯示緩存,顯示禁止信號高電平有效。
技術參數和功能:
1.稱量范圍:0-3000g·顯示精度:lg最大稱量誤差:±3g
2.零點自動校準功能:電子秤在長期使用后如發現有零點偏移現象,按“置零”鍵,程序自動完成零點校準運算并將新零點存人EEPROM中,同時數碼管顯示“----”、表示校準過程完成。
3.斜率自動校準功能:電子秤長期使用后發現稱量不準時,將一標準重量為2500g的物體放入托盤中,按“校準”鍵,程序自動完成斜率的校準運算并將新斜率存人EEPROM中,同時數碼管顯示“----”,表示校準過程完成4.按鍵開關機功能:正常稱量狀態下按動“開關”鍵一秒后,電子秤進入關機狀態(關掉耗電較大的數碼管顯示部分,對電池供電較為實用)。關機狀態下,按動“開關”鍵一秒后,電子秤即可進入正常稱量狀態。













 工商網監
工商網監
評論