 電子發燒友App
電子發燒友App


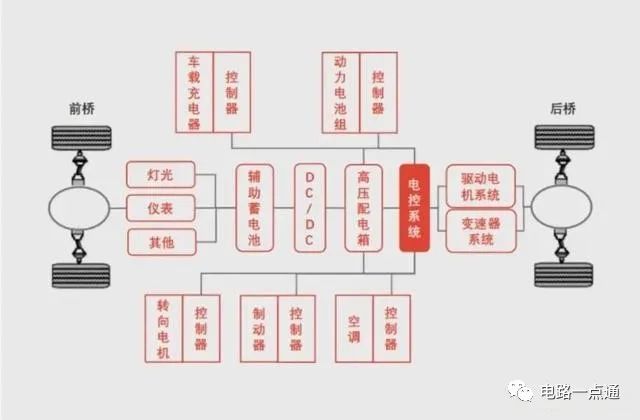
車輛的數據網絡包括有關轉向角及輪速的實時傳感器數據。根據該信息,配備前大燈的自適應轉向大燈系統能夠使光線的分布與車輛的轉向角相適應,以便于迎面而來的轉彎和岔路口—尤其是司機的凝視點—能夠得到最佳的照明。
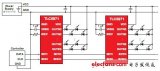
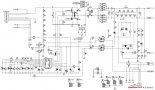
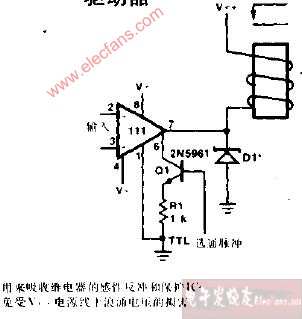
每臺車輛前大燈的轉動都是通過使用步進電機而實現的,其中,一臺步進電機控制垂直方向上的轉動,另一臺用于控制水平方向上的轉動(見下圖)。電機根據車輛四周的許多傳感器反饋的數據作出反應。信息的傳達是通過車輛的數據網絡系統實現的。LIN總線是前大燈控制的一個實用的選擇,而CAN總線則能夠將傳感器數據收集起來并且分配到整個車輛。步進電機是前大燈調節應用的一個最佳選擇,因為這些電機成本低,堅固耐用,體型雖小卻能夠提供一個很大的扭矩。

圖1
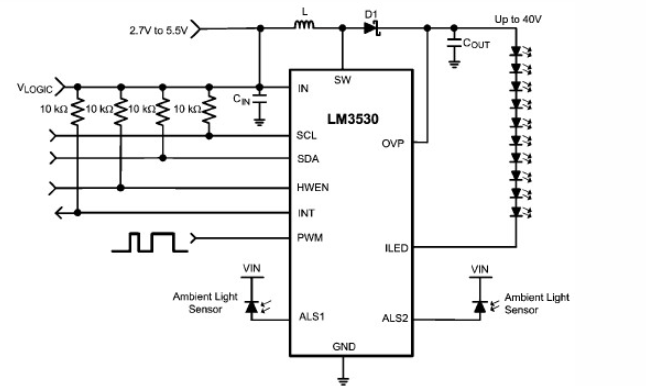
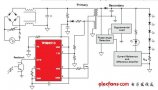
以下提出一種新的高功率因數非隔離LED驅動電路,組合了逐流式功率因Buck-boost開關電源電路電路結構簡單,同時滿足LED驅動電源的高功率因數,高效率,符合電磁兼容EMC標準,高電流控制精度,高可靠性、體積小、成本低等一系列要求。
AP3766是BCD公司最新推出的LED專用驅動控制芯片,采用原邊調整控制(PSR)技術實現高精度的恒壓/恒流(CV/CC)輸出,省去了副邊光耦及恒壓恒流控制電路,也不需要環路補償電路實現了電路的穩定控制,并且采用SOT-23-6 小體積封裝,顯著縮小系統體積,降低了系統成本。AP3766具有“亞微安啟動電流”專利技術,降低了系統功耗,提升了效率。能夠使得效率大于80%,空載功耗小于30mW. AP3766內置外部元件溫度變化補償及恒流CC收緊技術實現垂直的CC特性,保證了量產情況下±5%的輸出恒流精度。同時,AP3766內置軟啟動,過壓保護,短路保護功能,提高了系統可靠性。
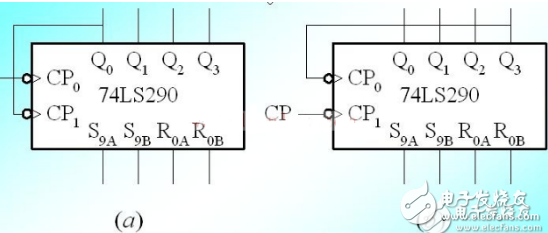
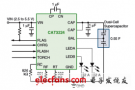
圖2為AP3766的管腳圖。
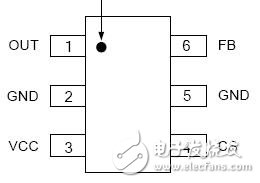
圖2. AP3766的管腳圖
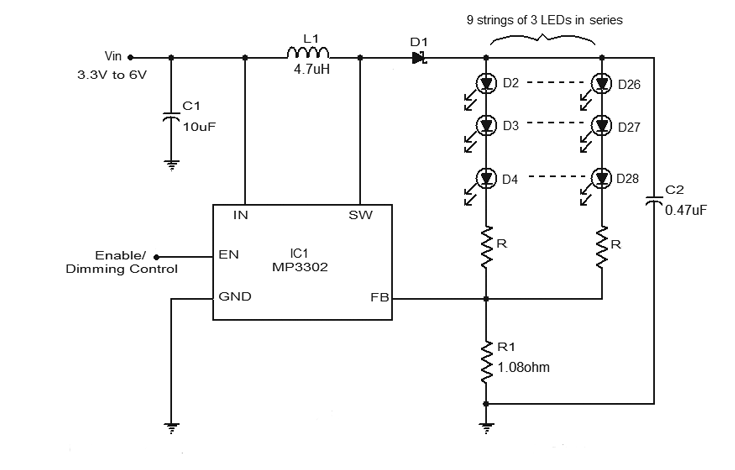
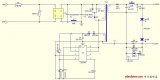
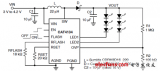
電路原理圖
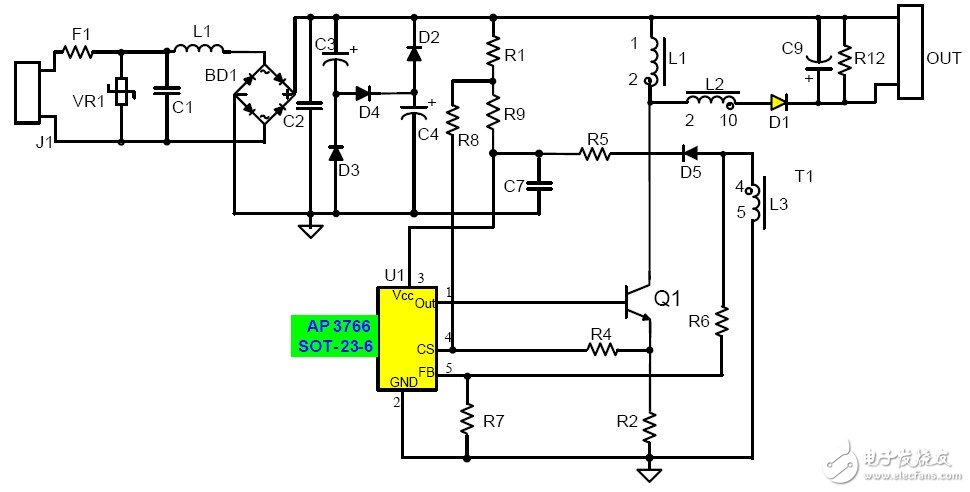
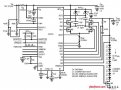
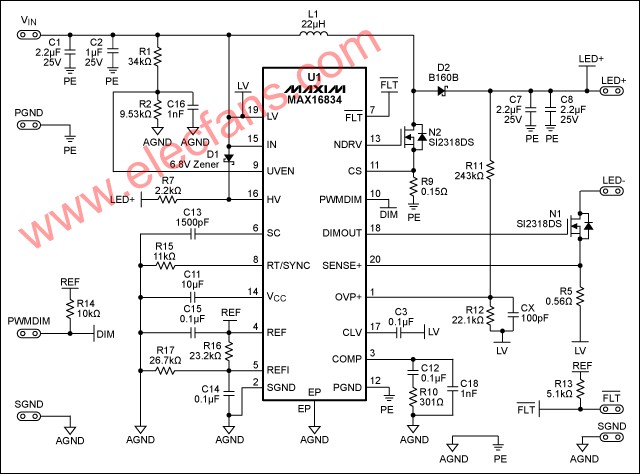
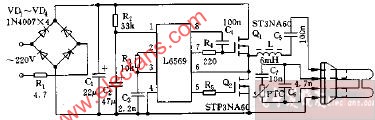
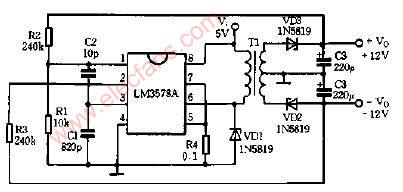
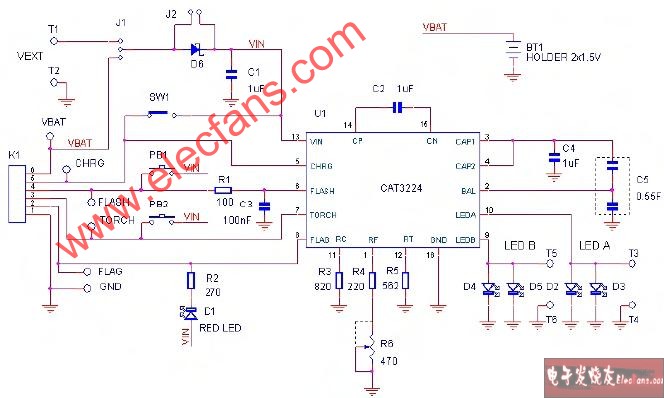
圖3. 基于AP3766的高功率因數非隔離LED驅動電路原理圖
圖3中F1為保險絲,C3,C4,D2,D3,D4構成一個逐流式電路實現功率因數校正功能。逐流式電路提高整流電路功率因數的原理在于增大了整流電路的導通角,在輸入交流電壓大于峰值電壓一半時,整流橋BD1就能導通,避免了傳統不控整流電路只在交流電壓峰值附近才能瞬間導通導致大的電流尖峰和波形畸變問題,從而降低了總諧波失真度,即THD.
經過逐流式電路后,由L1,L2,Q1,D1,C9構成的Buck-boost開關電源電路完成升降壓和恒流輸出功能,控制芯片U1實現Buck-boost開關電源電路的開關控制功能。電感L1, L2,L3通過磁芯T1相互耦合。
采用原邊開關控制方式的Buck-boost開關電源電路工作原理是:設定在一個開關周期內,輸出二極管D1的導通時間為Tons,關斷時間為 Toffs,輸出電流峰值為Ipk,耦合電感L1繞組匝數N1, 耦合電感L2繞組匝數N2.控制芯片U1控制開關占空比,保持輸出二極管D1的導通時間Tons和關斷時間Toffs比例恒定,則一個開關周期內,輸出電流的平均值為:
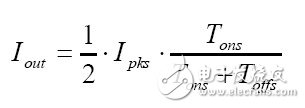
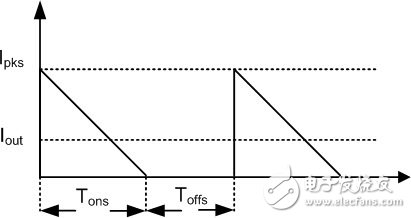
圖4 二極管D1的電流波形
編輯點評:本文簡單介紹了車載LED驅動器的電路設計,一種新的高功率因數非隔離LED驅動電路,組合了逐流式功率因Buck-boost開關電源電路電路結構簡單,同時滿足LED驅動電源的高功率因數,高效率,符合電磁兼容EMC標準,高電流控制精度,高可靠性、體積小、成本低等一系列要求。
電子發燒友《智能醫療特刊》,更多優質內容,馬上下載閱覽
?














 工商網監
工商網監
評論