AT90CAN32_06 - Microcontroller with 32K/64K/128K Bytes of ISP Flash and CAN Controller - ATMEL Corporation
1970-01-01 08:00:00
AVR914 CAN UART based Bootloader for AT90CAN32_AT90CAN64_AT90CAN128
2017-09-21 13:17:47 19
19 CAN H與 CAN L短路 當(dāng)CAN H 與CAN L 短路時,CAN網(wǎng)絡(luò)會關(guān)閉,無法再進(jìn)行通信。會有相應(yīng)的網(wǎng)絡(luò)故障碼。CAN H 與CAN L短路的總線波形如下圖所示。 當(dāng)兩者相互短路之后
2023-09-14 16:34:35 595
595 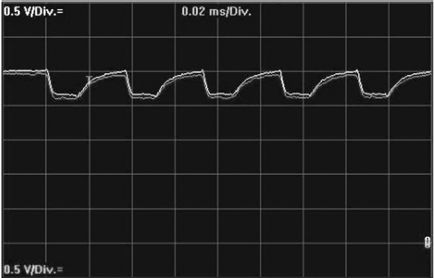
CAN 是什么?CAN 是Controller Area Network 的縮寫(以下稱為CAN),是ISO*1 國際標(biāo)準(zhǔn)化的串行通信協(xié)議
2008-07-19 21:21:3979321 
CAN-BUS,CAN-BUS是什么意思
CAN-BUS 1,CAN-BUS的起源 控制器局域網(wǎng)(controllerareanetwork 簡稱CAN)最初是德國Bosch公司于198
2010-03-11 15:31:5918049 什么是標(biāo)準(zhǔn)格式CAN和擴(kuò)展格式CAN?標(biāo)準(zhǔn)CAN的標(biāo)志符長度是11位,而擴(kuò)展格式CAN的標(biāo)志符長度可達(dá)29位。CAN 協(xié)議的2.0A版本規(guī)定CAN控制器必須有一個11位的標(biāo)志符。同時,在2.0B
2008-10-27 13:08:015950 (一)配置流程(1)啟用CAN控制器接口時鐘 RCC_APB1PeriphClockCmd (RCC_APB1Periph_CAN1,使);for CAN
2021-12-04 15:36:0928 電子發(fā)燒友網(wǎng)站提供《AN13423:使用CAN2CAN CAN2ETH ETH2CAN LLCE S32G應(yīng)用注意的特性.pdf》資料免費下載
2023-08-16 18:23:303 自動駕駛技術(shù)迅速發(fā)展,車輛中的CAN總線已經(jīng)無法滿足數(shù)據(jù)吞吐量和傳輸速度的要求,CAN總線的加速升級版——CAN FD技術(shù)正在逐漸替代現(xiàn)有網(wǎng)絡(luò)。為了進(jìn)一步了解CAN FD,本文將從產(chǎn)品的實際應(yīng)用介紹CAN FD的升級及優(yōu)勢。
2018-09-20 09:31:408177 CAN-BUS,CAN-BUS原理是什么? 1,CAN-BUS的起源 控制器局域網(wǎng)(controllerareanetwork 簡稱CAN)最初是德國Bosch公司于1983年為汽車應(yīng)用而開發(fā)的,一種能有效
2010-03-22 15:51:482506 因為受制于產(chǎn)品的穩(wěn)定性考驗,改造成本等問題,沒法快速全面普及CAN FD。另外,在2012年底提出CAN FD到2015年中成為ISO CAN FD。
2022-10-18 14:20:161665 本資料是面向 CAN 總線初學(xué)者的 CAN 入門書。對 CAN 是什么、CAN 的特征、標(biāo)準(zhǔn)規(guī)格下的位置分布等、 CAN 的概要及 CAN 的協(xié)議進(jìn)行了說明。
2015-12-17 17:18:0893 CAN_ISO11898與CAN2.0,感興趣的小伙伴們可以看看。
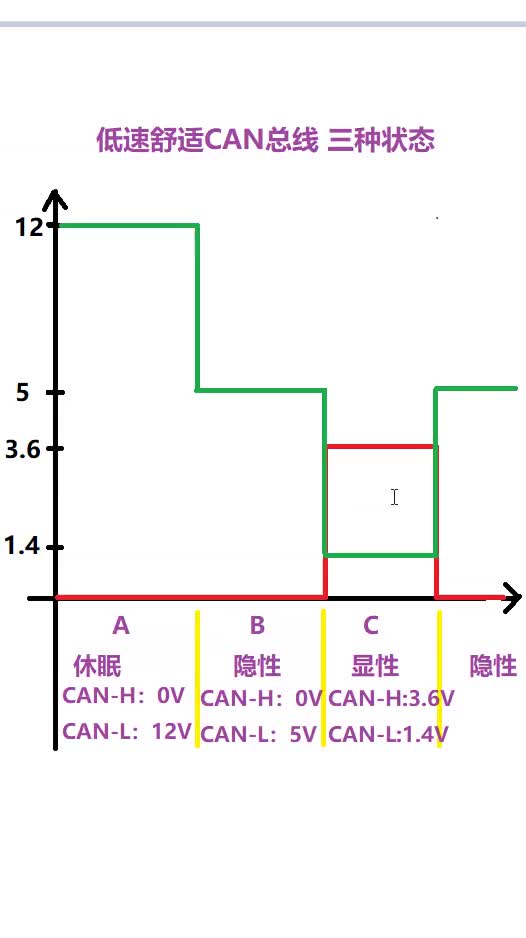
2016-07-26 10:43:06416 在ISO 11898-2和ISO 11898-3中分別規(guī)定了兩種CAN總線結(jié)構(gòu)(在BOSCH CAN2.0規(guī)范中,并沒有關(guān)于總線拓?fù)浣Y(jié)構(gòu)的說明):高速CAN總線和低速CAN總線,區(qū)別表如下所示。
2023-04-07 09:30:18895 
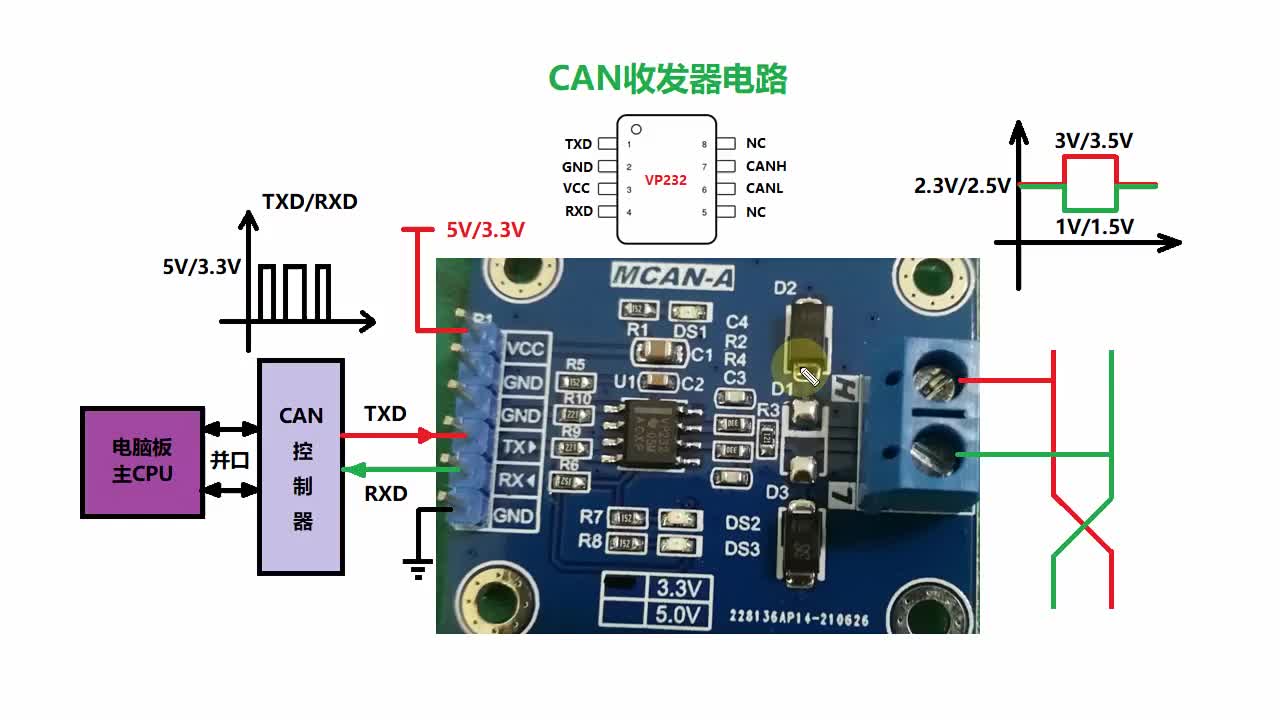
高速CAN總線上為顯性電平(邏輯0)時,CAN_H為3.5V、CAN_L為1.5V,此時電壓差是2V,顯性狀態(tài)的CAN總線電壓范圍。
高速CAN總線上為隱性電平(邏輯1)時,CAN_H和CAN_L都為2.5V,此時電壓差就是0V,隱性狀態(tài)的CAN總線電壓范圍。
2022-09-13 16:57:222938 【TinyM0-CAN配套例程】CAN例程
CAN例程
2010-11-15 16:46:2570 基本說明:TCO-151可實現(xiàn) PROFINET網(wǎng)絡(luò)與CANopen或CAN網(wǎng)絡(luò)之間的數(shù)據(jù)通信。網(wǎng)關(guān)在PROFINET網(wǎng)絡(luò)作為從站,CANopen端既可以做主站也可以做從站,CAN端支持CAN2.0A/CAN2.0B協(xié)議,支持對CAN幀進(jìn)行過濾處理。
2023-04-14 11:12:21
您是否遇到需要使用CAN總線,但MCU沒有集成CAN總線控制器的情況?您又是否遇到MCU的CAN口資源不夠的情況?一顆CSM330A芯片能解決您的問題,本文將帶您了解CSM330A的優(yōu)勢
2023-09-04 16:41:46331 
當(dāng)出現(xiàn)CAN L 與CAN H 導(dǎo)線互相接反這種故障時,一般情況下,接錯的那個控制模塊將無法通信,其他控制模塊的通信則正常。CAN L 與CAN H導(dǎo)線互相接反的示意圖如下圖所示。 在懷疑有
2023-09-14 16:59:59905 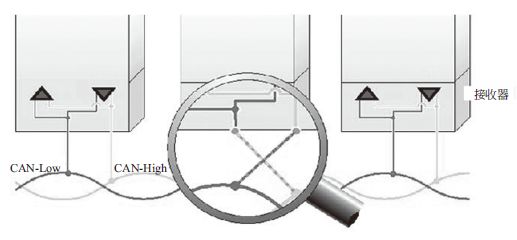
很多的司機(jī)朋友以及工控圈的朋友都有聽到過“CAN總線”一詞,今天我們就來一起看一下CAN總線為什么這么火? CAN總線,也叫做控制器局域網(wǎng)總線(Controller Area Network
2022-01-15 17:04:485567 本資料是面向 CAN 總線初學(xué)者的 CAN 入門書。對 CAN 是什么、CAN 的特征、標(biāo)準(zhǔn)規(guī)格下的位置分布等、
CAN 的概要及 CAN 的協(xié)議進(jìn)行了說明。
2023-02-03 14:59:502 本資料是面向 CAN 總線初學(xué)者的 CAN 入門書。對 CAN 是什么、CAN 的特征、標(biāo)準(zhǔn)規(guī)格下的位置分布等、CAN 的概要及 CAN 的協(xié)議進(jìn)行了說明。
2022-09-28 11:34:3613 CAN已經(jīng)形成國際標(biāo)準(zhǔn),并已被公認(rèn)為幾種最有前途的現(xiàn)場總線之一。CAN 總線的數(shù)據(jù)通信具有突出的可靠性、實時性和靈活性。由于其良好的性能及獨特的設(shè)計,CAN總線越來越受到人們的重視,它在汽車領(lǐng)域上的應(yīng)用是最廣泛的。接下來及跟隨小編一起來了解一下CAN總線的工作原理、特點及優(yōu)缺點、應(yīng)用領(lǐng)域及應(yīng)用案例吧。
2018-05-07 10:36:3933194 
基本說明:TCO-151可實現(xiàn) PROFINET網(wǎng)絡(luò)與CANopen或CAN網(wǎng)絡(luò)之間的數(shù)據(jù)通信。網(wǎng)關(guān)在PROFINET網(wǎng)絡(luò)作為從站,CANopen端既可以做主站也可以做從站,CAN端支持CAN2.0A/CAN2.0B協(xié)議,支持對CAN幀進(jìn)行過濾處理。
2023-02-27 10:38:31
can總線為什么要用雙絞線?can總線不用雙絞線可以嗎? CAN總線是一種數(shù)據(jù)通信協(xié)議,廣泛用于汽車、航空、船舶、工業(yè)自動化、機(jī)器人等領(lǐng)域。CAN總線采用串行通信方式,主要用于實現(xiàn)多個模塊之間的通信
2023-09-14 16:48:05989 眾所周知,CAN網(wǎng)絡(luò)具有易于實現(xiàn)、可擴(kuò)展、并支持復(fù)雜拓?fù)浣Y(jié)構(gòu)等諸多優(yōu)點,所以目前在各個行業(yè)特別是汽車領(lǐng)域,得到
了非常廣泛的應(yīng)用。但是,它也存在著諸多問題,其中最大的一點就是總線帶寬和數(shù)據(jù)場長
2023-05-18 11:32:220 本資料是面向 CAN 總線初學(xué)者的 CAN 入門書。對 CAN 是什么、CAN 的特征、標(biāo)準(zhǔn)規(guī)格下的位置分布等、
CAN 的概要及 CAN 的協(xié)議進(jìn)行了說明。
2022-09-01 15:40:305 CAN入門書之中文版CAN通信協(xié)議
2021-11-18 16:36:31119 本文說的CAN即是一種總線,也是一種協(xié)議。因此,我們常聽見CAN總線,也常聽見CAN協(xié)議。CAN協(xié)議和CANOpen協(xié)議是兩套不同的協(xié)議。從軟硬件層次來劃分,CAN協(xié)議屬于硬件協(xié)議,而CANOpen
2018-10-03 19:53:0072163 
Unexpected N_PDU的處理只適用于相同N_AI的診斷報文。Classical CAN和CAN FD的N_AI本就不同,所以,互不干擾,可以并行處理;單個Message中不要混用Classical CAN和CAN FD。
2022-12-05 10:06:20613 目錄:一、CAN通信原理1.CAN通信簡介2.CAN通信優(yōu)點3.CAN總線物理層4.CAN報文種類5.數(shù)據(jù)幀格式6.仲裁過程7.位同步二、STM32的CAN控制器1.功能特點2.STM32CAN架構(gòu)
2021-11-19 12:21:0882 本資料是面向CAN總線初學(xué)者的CAN入門書。對CAN是什么、CAN的特征、標(biāo)準(zhǔn)規(guī)格下的位置分布等、CAN的概要及CAN的協(xié)議進(jìn)行了說明。
2022-04-02 16:35:3223 其實CAN總線是多主模式,并不是主從模式。我們平時稱呼的主CAN,從CAN,其實除了稱呼不同,在使用和功能上沒有任何區(qū)別。1.CAN 節(jié)點代碼can.c//CAN初始化//tsjw:重新同步跳躍
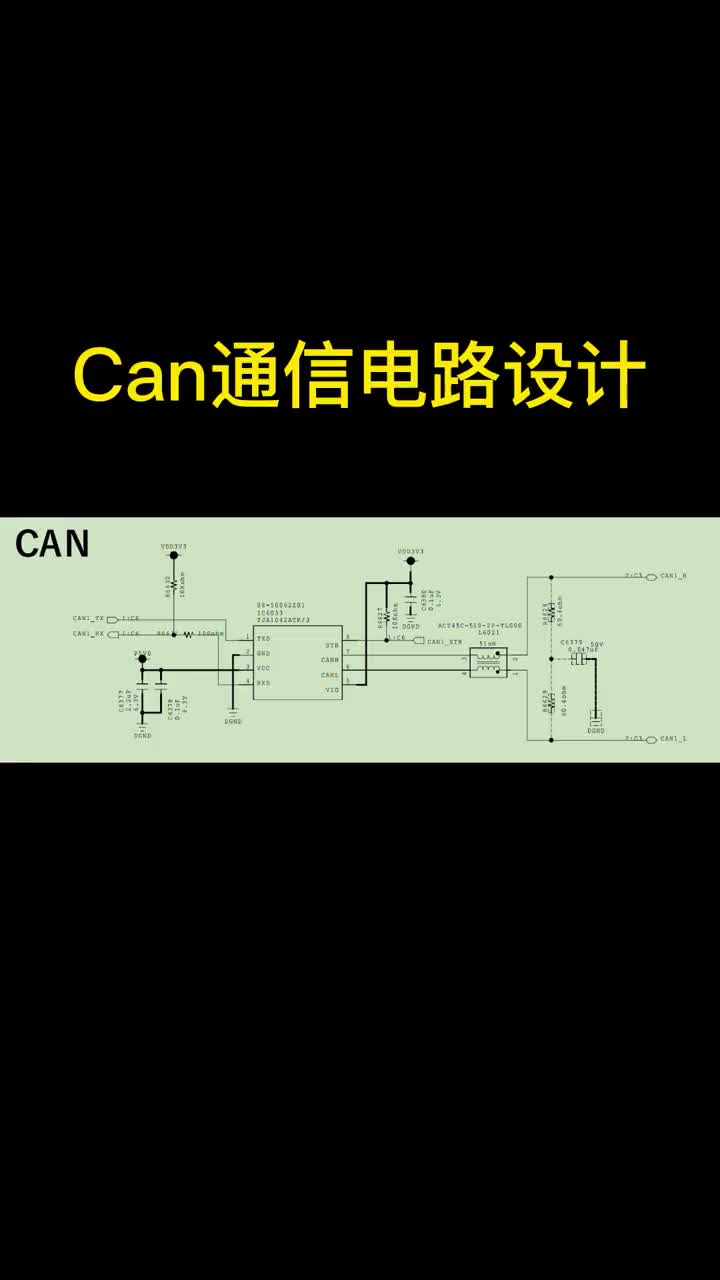
2021-12-04 19:06:095 CAN基礎(chǔ)知識介紹文中介紹了CAN協(xié)議相關(guān)的基礎(chǔ)知識,以及STM32F4芯片的CAN控制器相關(guān)知識,下面將通過實例,利用STM32CubeMX圖形化配置工具,并配合CAN盒,來實現(xiàn)CAN通訊的中斷收發(fā)測試
2023-01-16 17:17:443548 本資料是面向 CAN 總線初學(xué)者的 CAN 入門書。對 CAN 是什么、CAN 的特征、標(biāo)準(zhǔn)規(guī)格下的位置分布等、 CAN 的概要及 CAN 的協(xié)議進(jìn)行了說明。本資料對博世(BOSCH)公司所提出的 CAN 概要及協(xié)議進(jìn)行了歸納,可作為實際應(yīng)用中的參考資料。對于 具有 CAN 功能的產(chǎn)品不承擔(dān)任何責(zé)任。
2023-04-17 09:34:444 在嵌入式產(chǎn)品開發(fā)過程中,可能會面臨CAN路數(shù)不夠的問題。如何選擇合適的轉(zhuǎn)換模塊解決這個問題呢?本文為您講解幾款模塊的選型方法。應(yīng)用場景CAN總線是優(yōu)秀的現(xiàn)場總線之一,已由當(dāng)初的汽車電子擴(kuò)散到各行各業(yè)
2021-10-29 10:06:2512 目前,整車的網(wǎng)絡(luò)拓?fù)渲校?b style="color: red">CAN FD的使用已經(jīng)非常普遍。當(dāng)然,帶來的問題也非常的多。CAN FD在設(shè)計之初,就考慮了向后兼容Classic CAN,以便于CAN FD報文和經(jīng)典CAN報文在同一個局域網(wǎng)內(nèi)共存。
2023-08-22 09:11:09453 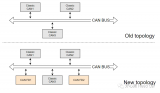
CAN通信矩陣(CAN Communication Matrix)通常由整車廠完成定義,車輛網(wǎng)絡(luò)中的各個節(jié)點需要遵循該通訊矩陣才能完成信息的交互和共享。
2022-09-08 09:57:34840 很多汽車電子工程師對CAN都不陌生,作為車上各種傳感器數(shù)據(jù)的傳遞橋梁,CAN是汽車上不可或缺的部分,CAN的全稱為“控制器局域網(wǎng)總線技術(shù)(Controller Area Network-BUS
2023-02-10 16:52:53828 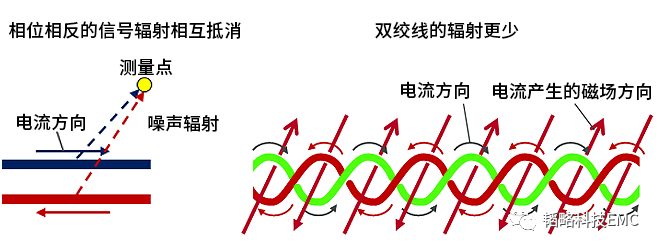
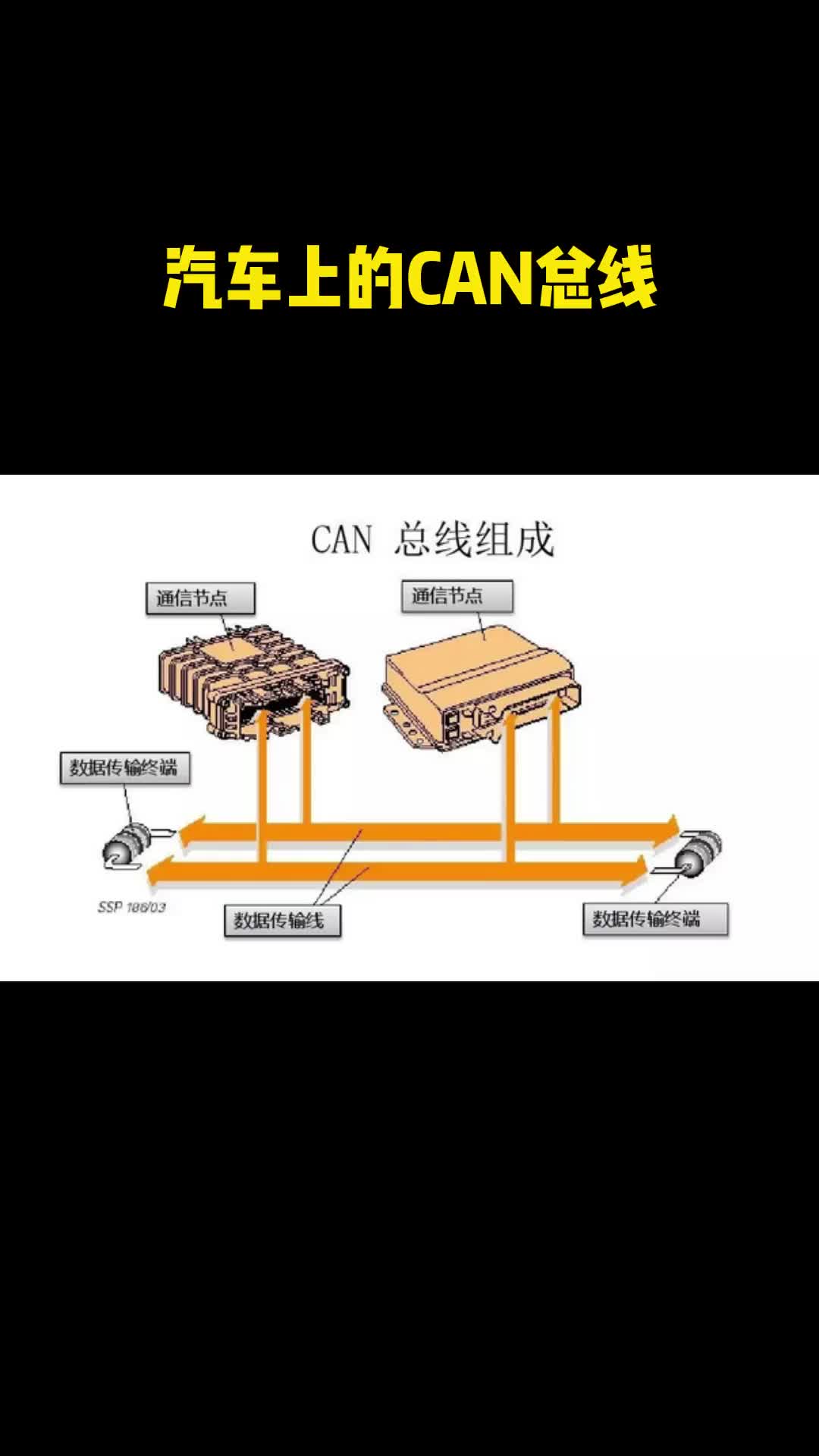
CAN總線是什么?CAN總線定義是什么? CAN(Controller Area Network)是ISO國際標(biāo)準(zhǔn)化的串行通信協(xié)議。廣泛應(yīng)用于汽車、船舶等。 CAN控制器通過組成總線的2根線
2017-12-27 13:40:0730301 
應(yīng)用指南—如何使用DSLogic分析CAN/CAN-FD 信號?
2023-09-04 14:15:56643 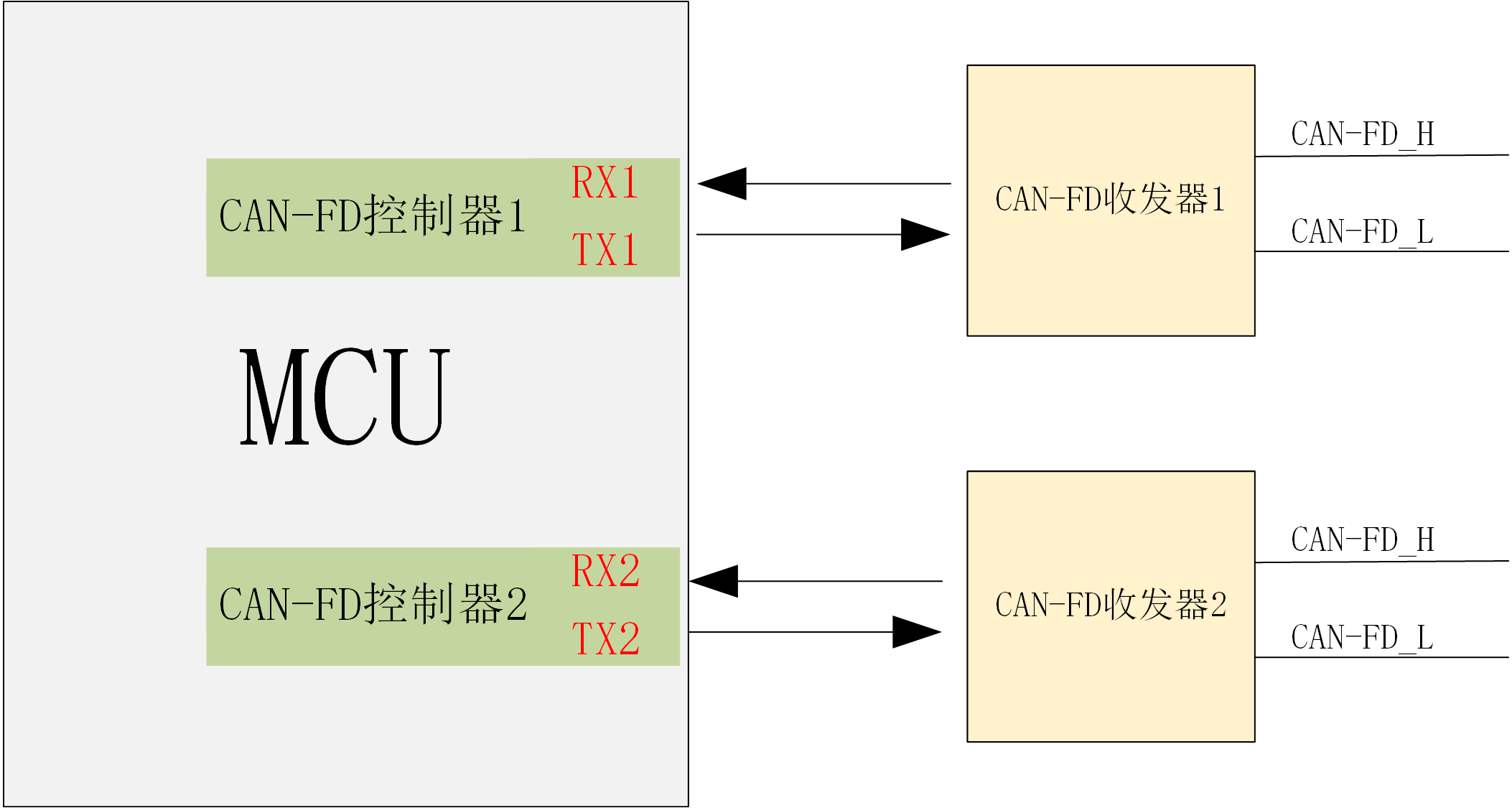
本資料是面向CAN 總線初學(xué)者的CAN 入門書。對CAN 是什么、CAN 的特征、標(biāo)準(zhǔn)規(guī)格下的位置分布等、CAN 的概要及CAN 的協(xié)議進(jìn)行了說明。2. 使用注意事項本資料對博世(BOSCH)
2008-07-19 21:17:062129 針對不同的目的和要求的基于CAN協(xié)議的較高層協(xié)議標(biāo)準(zhǔn)。下面就對CAN 協(xié)議及其較高層協(xié)議DeviceNet和CANopen進(jìn)行一些比較。
2011-05-09 10:26:002613 
CAN總線:CAN 是Controller Area Network 的縮寫(以下稱為 CAN),是 ISO1 國際標(biāo)準(zhǔn)化的串行通信協(xié)議。
2023-08-14 14:58:59333 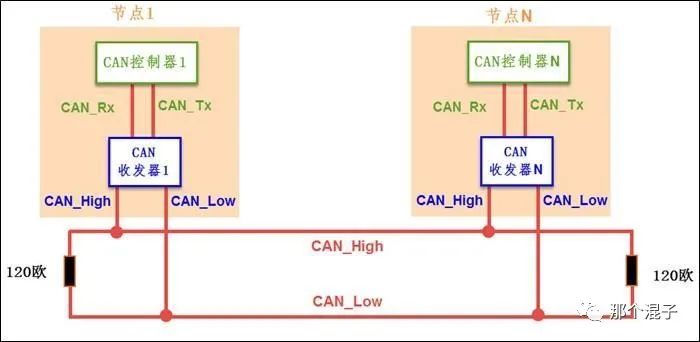
How to test CAN/CANFD in linuxThe Linux kernel supports CAN with the SocketCAN framework.Driver
2021-11-02 13:51:0823 在本系列文章中,我們將為您詳細(xì)介紹CAN總線錯誤的相關(guān)知識,包括CAN總線錯誤的基礎(chǔ)概念、CAN總線錯誤的類型、CAN錯誤幀和CAN節(jié)點錯誤狀態(tài),并通過實際的應(yīng)用測試生成并記錄CAN錯誤。
2022-06-13 16:08:346530 CAN 電氣屬性 CAN 總線使用兩根線來連接各個單元:CAN_H 和 CAN_L,CAN 控制器通過判斷這兩根線上的電位差來得到總線電平,CAN總線電平分為顯性電平和隱性電平兩種。顯性電平表示邏輯
2023-07-25 10:30:41381 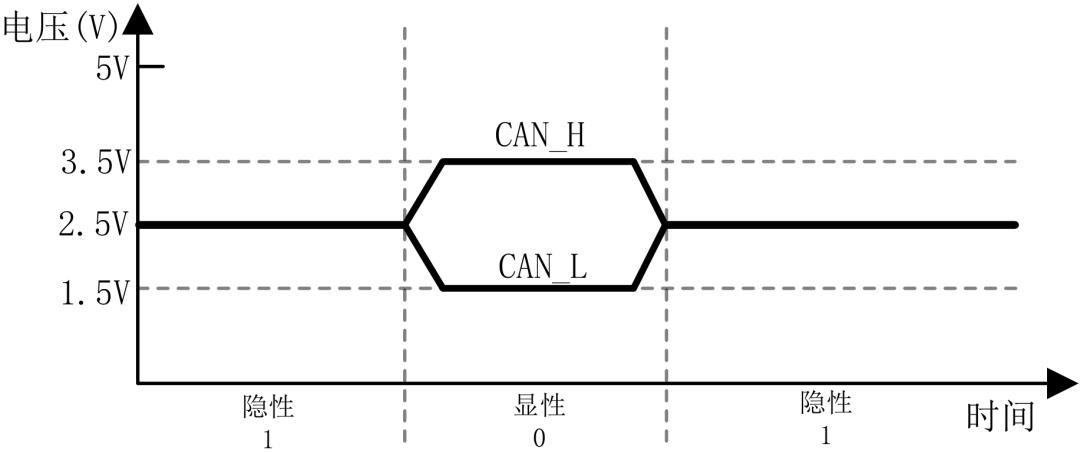
CAN總線通信是目前汽車電子和工業(yè)現(xiàn)場的主流通信,CAN總線憑其穩(wěn)定性、時效性、抗干擾性、傳輸距離遠(yuǎn)及低成本等特點,占領(lǐng)總線巔峰,但是隨著越來越多的電子產(chǎn)品的誕生,再加上工業(yè)現(xiàn)場等干擾,即使是CAN
2018-05-07 17:09:357367 自動駕駛技術(shù)迅速發(fā)展,車輛中的CAN總線已經(jīng)無法滿足數(shù)據(jù)吞吐量和傳輸速度的要求,CAN總線的加速升級版——CAN FD技術(shù)正在逐漸替代現(xiàn)有網(wǎng)絡(luò),為了進(jìn)一步了解CAN FD,本文將從產(chǎn)品的實際應(yīng)用介紹CAN FD的升級及優(yōu)勢。
2018-09-19 16:56:0312118 CAN L對帶電源(正極)短路 當(dāng)出現(xiàn)CAN L 對電源(正極)短路這種故障時,根據(jù)CAN總線的容錯特性,可能出現(xiàn)整個CAN網(wǎng)絡(luò)無法通信的情況或產(chǎn)生相關(guān)故障碼。 由于CAN L 對電源短路,因此
2023-09-14 16:57:08683 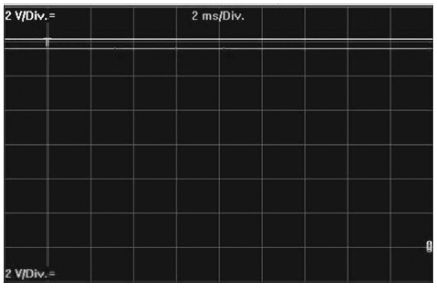
隨著汽車電子、工業(yè)自動化的蓬勃發(fā)展,CAN總線上的設(shè)備數(shù)量、數(shù)據(jù)量都大大增加,給CAN總線帶來的極大的挑戰(zhàn)。為滿足更高的帶寬及數(shù)據(jù)吞吐量,CAN FD(CAN with Flexible Data-Rate)誕生了。
2017-10-18 17:38:1483122 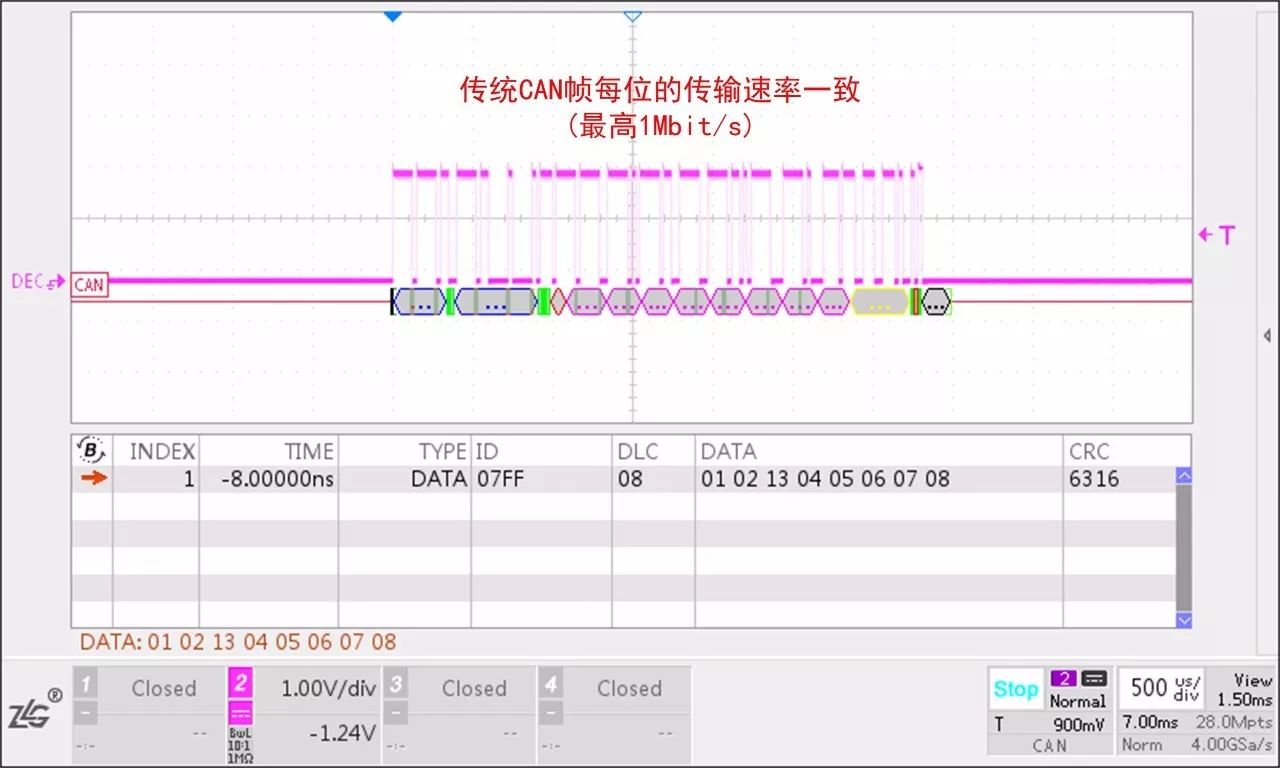
CAN 基本知識.pdf
CAN基本知識什么是CAN ?CAN,全稱為“Controller Area Network”,即控制器局域網(wǎng),是國際上應(yīng)用最廣泛的現(xiàn)場總線之一。最初,CAN被設(shè)計作為汽
2010-03-19 15:40:2825 This paper describes two different methods to detect the CAN baudrate with Infineon CAN devices.
2009-06-17 11:30:2929 0.前言 這是我為公司寫的一個關(guān)于CAN總線的入門文章,對全面理解CAN總線特性很有幫助,拿出來分享給大家。
2022-01-26 17:10:5117 CAN總線網(wǎng)絡(luò)主要掛在CAN_H和CAN_L,各個節(jié)點通過這兩條線實現(xiàn)信號的串行差分傳輸,為了避免信號的反射和干擾,還需要在CAN_H和CAN_L之間接上120歐姆的終端電阻。
2023-01-30 09:24:321687 CAN總線協(xié)議及CAN在工業(yè)控制中的應(yīng)用說明。
2021-04-20 11:14:0127 CAN總線(一) 嵌入式的工程師一般都知道CAN總線廣泛應(yīng)用到汽車中,其實船艦電子設(shè)備通信也廣泛使用CAN,隨著國家對海防的越來越重視,對CAN的需求也會越來越大。概述 CAN
2021-11-25 13:51:0315 本文以LPC2119 微控制器為核心設(shè)計了客車網(wǎng)絡(luò)控制中CAN/CAN 網(wǎng)橋,實現(xiàn)了不同CAN 網(wǎng)段連接、報文過濾和轉(zhuǎn)發(fā)功能。文中分析和闡述了該網(wǎng)橋的硬件設(shè)計方案和軟件設(shè)計過程,并通過實
2009-08-04 14:39:5022 即從CAN控制芯片輸出邏輯電平到CAN收發(fā)器,然后經(jīng)過CAN收發(fā)器內(nèi)部轉(zhuǎn)換將邏輯電平轉(zhuǎn)換為差分信號輸出到CAN總線上,CAN總線上的節(jié)點都可以決定自己是否需要總線上的數(shù)據(jù)。
2023-03-29 10:06:164582 CAN協(xié)議教程 介紹:CAN總線 CAN總線是廣播類型的總線。這意味著所有節(jié)點都可以偵聽到所有傳輸?shù)膱笪摹o法將報文單獨發(fā)送給指定節(jié)點;所有節(jié)點都將始終捕獲所有報文。但是,CAN硬件能夠提供本地過濾
2020-04-03 15:32:2213200 捷米特JM-PN-CAN 是自主研發(fā)的一款 PROFINET 從站功能的通訊網(wǎng)關(guān)。主要功能是將各種 CAN 設(shè)備接入到 PROFINET 網(wǎng)絡(luò)中。
捷米特JM-PN-CAN連接到 PROFINET 總線中做為從站使用,連接到 CAN 總線中根據(jù)節(jié)點號進(jìn)行讀寫。
2023-07-03 09:06:04221 
CAN基礎(chǔ)知識介紹文中介紹了CAN協(xié)議的基礎(chǔ)知識,以及STM32F4芯片的CAN控制器相關(guān)知識,下面將通過實例,利用STM32CubeMX圖形化配置工具,來實現(xiàn)CAN通訊的環(huán)回測試
2023-01-04 15:23:151492 can總線負(fù)載率多少合理? CAN總線是一種控制器區(qū)域網(wǎng)絡(luò),它是用于在不同設(shè)備之間進(jìn)行通信的技術(shù)。CAN總線的應(yīng)用領(lǐng)域廣泛,例如汽車、航空航天、醫(yī)學(xué)儀器等。在CAN總線中,數(shù)據(jù)通過網(wǎng)絡(luò)傳輸,并且在
2023-09-07 15:05:41653 以MSCAN08和MSCAN12為示例,講述CAN現(xiàn)場總線,初步掌握CAN總線技術(shù)的應(yīng)用。
2021-04-20 16:12:35286 客車網(wǎng)絡(luò)控制中CAN/CAN網(wǎng)橋設(shè)計
1 引言控制器局部網(wǎng)CAN[1][2](Controller Area Network)是德國Robert Bosch公司在20世紀(jì)80年代初為汽車業(yè)開發(fā)的一種車載專用串行數(shù)據(jù)通信總線
2009-11-10 10:26:39483 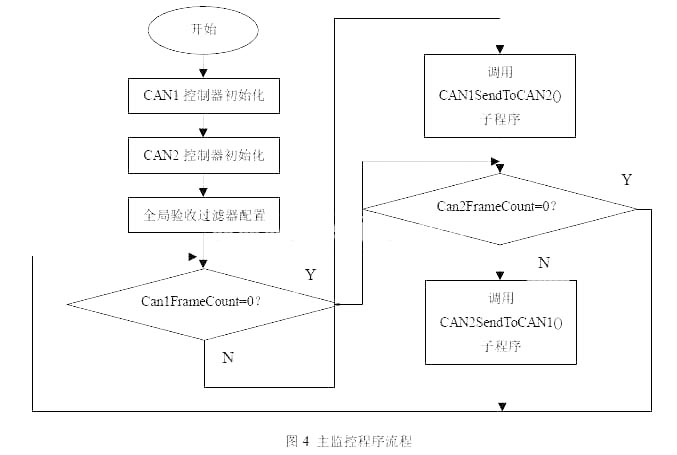
“本文介紹MCU通過SPI串口擴(kuò)展CAN/CAN FD接口擴(kuò)展方案,該方案基于MCP2518FD+ATA6563,可快速部署應(yīng)用于實際項目。”1.CAN FD和CAN 2.0的區(qū)別CAN FD解決了
2021-10-29 11:21:1116 1 STM32—bxCAN:是基本擴(kuò)展CAN(Basic ExtendedCAN)的縮寫,它支持CAN協(xié)議2.0A和2.0B。它的設(shè)計目標(biāo)是,以最小的CPU負(fù)荷來高效處理大量收到的報文。它也支持報文
2021-12-04 18:21:1010 電子發(fā)燒友網(wǎng)報道(文/李寧遠(yuǎn))在汽車通信網(wǎng)絡(luò)里,CAN BUS指的是車載多路通信系統(tǒng),其目的是簡化車輛線束并加快通信速度。CAN BUS會允許將多個設(shè)備(ECU)連接到一條通信線路并彼此交換數(shù)據(jù)
2022-04-25 07:52:004150 CAN外設(shè):掛載在MCU的APB總線上,實現(xiàn)基本協(xié)議CAN2.0A、擴(kuò)展協(xié)議CAN2.0B、接收濾波器、發(fā)送優(yōu)先級及對CAN FD的支持等,并留出外設(shè)訪問接口給MCU,以便MCU控制。
2023-08-10 17:34:471125 
CAN總線通常由兩根線組成:CAN-High(CAN-H)和CAN-Low(CAN-L),也稱為CAN-H線和CAN-L線,這兩根線呈對稱排列。CAN總線使用差分信號的方式進(jìn)行通信,通過在CAN-H和CAN-L線之間傳輸電壓差來表示數(shù)據(jù)和控制信號。
2023-09-12 14:59:29855 PCA-100在PROFIBUS DP端為從站,支持CAN2.0A/CAN2.0B設(shè)備連接到PROFIBUS DP主站進(jìn)行數(shù)據(jù)通信。
2023-04-12 09:44:36
CAN總線用戶接口簡單,編程方便。網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)采用總線式結(jié)構(gòu)。這種網(wǎng)絡(luò)結(jié)構(gòu)簡單、成本低,并且采用無源抽頭連接,系統(tǒng)可靠性高。通過CAN總線連接各個網(wǎng)絡(luò)節(jié)點,形成多主機(jī)控制器局域網(wǎng)(CAN)。信息的傳輸采用CAN通信協(xié)議,通過CAN控制器來完成。
2018-11-28 17:16:0316985 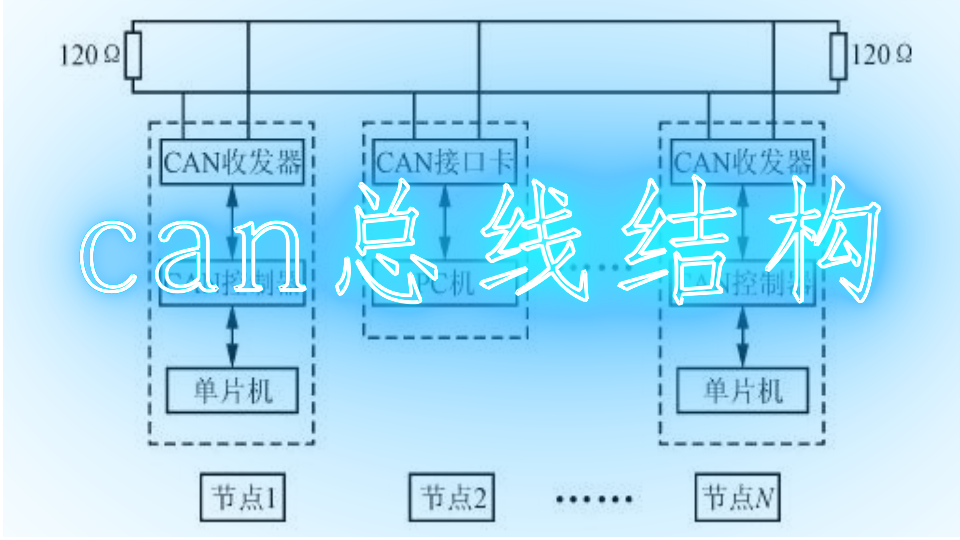
 電子發(fā)燒友App
電子發(fā)燒友App


















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論