通過北斗+RTK差分定位技術(shù),在定位區(qū)域安裝坐標(biāo)位置已確定的RTK差分定位基站,然后根據(jù)已知坐標(biāo)與北斗+RTK定位系統(tǒng)的定位數(shù)據(jù)求出修正值,再后將修正值發(fā)送給GPS/北斗定位標(biāo)簽,最后定位標(biāo)簽利用差分定位基站發(fā)送的修正值,對所觀測到的衛(wèi)星定位數(shù)據(jù)進(jìn)行修正,從而實現(xiàn)精準(zhǔn)定位。
2023-07-28 09:20:12 214
214 本文主要介紹了時鐘偏差和時鐘抖動。
2023-07-04 14:38:28593 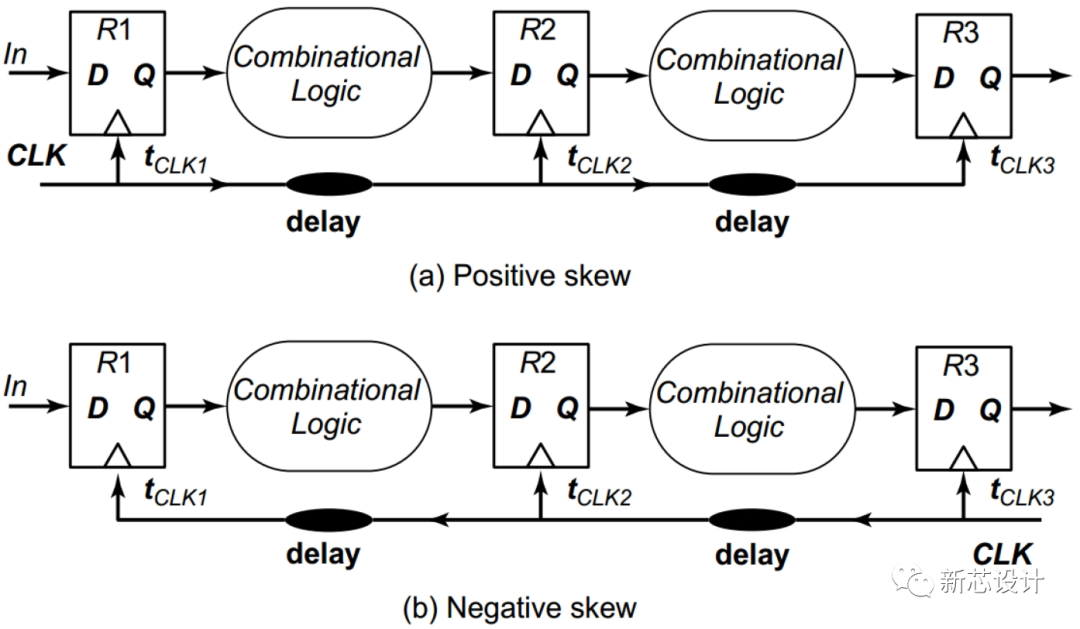
裝置中(例如恒溫恒濕箱)進(jìn)行實測,通過軟件對最終的誤差進(jìn)行修正,此項修正基本上可以彌補(bǔ)頻率變化所產(chǎn)生的誤差以及其他誤差。濕度傳感器阻抗變化與溫度的關(guān)系見規(guī)格書中的數(shù)據(jù)表,先檢測溫度,然后按查表法對進(jìn)行
2009-04-02 11:54:27
引入修正值法-如果通過測量儀器的校準(zhǔn)已知儀器的修正值,則將修正值加到測量結(jié)果的指示值上,即可得到測量值的實際值。 此時,4515DO-DS3AI002DP傳感器的系統(tǒng)誤差并沒有完全消除,而是大大減弱
2023-05-18 17:22:5389 
化工廠室外人員定位系統(tǒng)方案采用GPS/北斗RTK差分定位技術(shù),在衛(wèi)星定位的基礎(chǔ)上,安裝一個已知坐標(biāo)位置的RTK差分定位基站,差分定位基站根據(jù)已知坐標(biāo)和自己觀測到的衛(wèi)星定位數(shù)據(jù)求出修正值,并將修正值
2023-04-28 15:00:05716 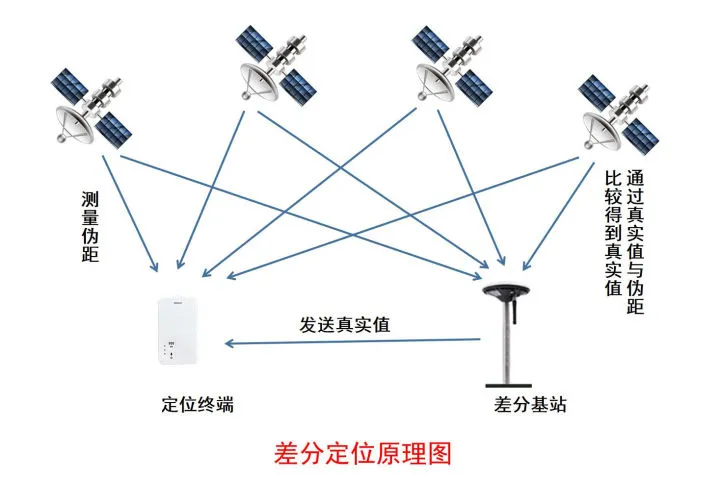
了解積分非線性 (INL) 規(guī)范及其與模數(shù)轉(zhuǎn)換器 (ADC) 誤差的關(guān)系。 失調(diào)誤差、增益誤差和INL這三個參數(shù)決定了ADC的精度。失調(diào)和增益誤差可以校準(zhǔn)出來,這使得INL成為主要的誤差貢獻(xiàn)者
2023-01-27 10:42:00937 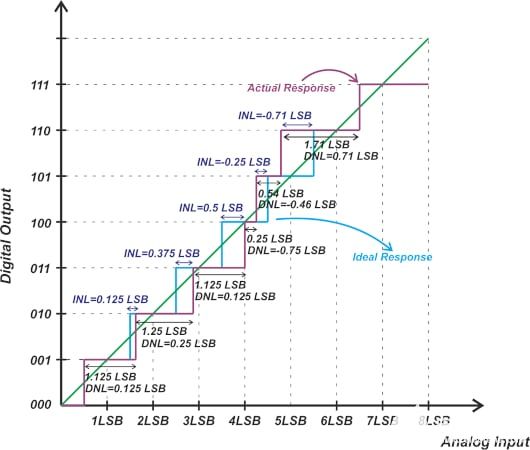
端口反射、短路響應(yīng)、全SOLT雙端口、直通響應(yīng)、全TRL雙端口、直通響應(yīng)+隔離、全SOLT3端口。 3、校準(zhǔn)方法:無引導(dǎo)校準(zhǔn)、有引導(dǎo)校準(zhǔn)、Ecal。 ? 網(wǎng)絡(luò)分析儀校準(zhǔn)類型及誤差修正 4、校準(zhǔn)后系統(tǒng)誤差修正:方向性、源匹配、隔離、負(fù)載匹配、頻
2022-12-28 16:24:581449 
在日常工作中,我們不僅要知道網(wǎng)絡(luò)分析儀是否工作正常,更重要的是要知道其測量誤差究竟有多大,這就需要選擇一組能全面考察網(wǎng)絡(luò)分析儀測量參數(shù)的標(biāo)準(zhǔn)件對其校準(zhǔn)配件一致。
2022-12-27 17:07:40591 
具有動態(tài)溫度補(bǔ)償?shù)?b style="color: red">修正 MOSFET 模型
2022-11-15 20:07:47 0
0 數(shù)據(jù)表,表中的修正值以0.5℃的溫度間隔給出,使用這些修正值,就可以把不確定度降低。空氣中使用,不需要使用油槽742A可以在空氣中使用,不需要使用很麻煩的油槽。其溫度穩(wěn)定
2022-03-28 15:49:55
在第一篇ADC精度帖子中,我們確定了模數(shù)轉(zhuǎn)換器 (ADC) 的分辨率和精度間的差異。現(xiàn)在我們深入研究一下對ADC總精度產(chǎn)生影響的因素,通常是指總不可調(diào)整誤差 (TUE)。
2022-02-06 09:02:003608 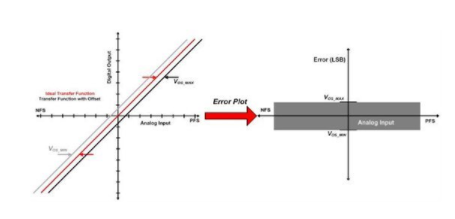
電壓偏差和電壓調(diào)整
2021-10-28 11:35:077 工程的方法建立標(biāo)準(zhǔn)齒輪模型獲得齒輪的參考點(diǎn)云,結(jié)合經(jīng)典迭代最近點(diǎn)算法實現(xiàn)齒廓目標(biāo)點(diǎn)云和參考點(diǎn)云的配準(zhǔn),采集配準(zhǔn)后的數(shù)據(jù)并進(jìn)行曲線擬合,獲得齒廓偏差并分析誤差。最后,通過齒廓偏差計算值和測量值的對比和分析。結(jié)果表明,
2021-05-07 16:32:5612 針對嵌套查詢中SQL語法結(jié)構(gòu)難以構(gòu)建的問題,提出結(jié)合關(guān)系分類與修正的 GSC-RCO方法,以3類實體間關(guān)系表示sQL語法。首先設(shè)計關(guān)系分類深度模型,并引入列名常用詞提升模型性能,用以確定語勺中毎饣
2021-04-22 14:25:466 工程的方法建立標(biāo)準(zhǔn)齒輪模型獲得齒輪的參考點(diǎn)云,結(jié)合經(jīng)典迭代最近點(diǎn)算法實現(xiàn)齒廓目標(biāo)點(diǎn)云和參考點(diǎn)云的配準(zhǔn),采集配準(zhǔn)后的數(shù)據(jù)并進(jìn)行曲線擬合,獲得齒廓偏差并分析誤差。最后,通過齒廓偏差計算值和測量值的對比和分析。結(jié)果表眀,
2021-04-16 11:22:083 動態(tài)測量誤差修正原理與技術(shù)。
2021-03-23 09:31:178 機(jī)器學(xué)習(xí)中的數(shù)據(jù)偏差是一種錯誤,其中數(shù)據(jù)集的某些元素比其他元素具有更大的權(quán)重和或表示。有偏見的數(shù)據(jù)集不能準(zhǔn)確地表示模型的用例,從而導(dǎo)致結(jié)果偏斜,準(zhǔn)確性水平低和分析錯誤。 通常,用于機(jī)器學(xué)習(xí)項目的訓(xùn)練
2021-01-05 17:54:452301 不確定度是由隨機(jī)影響和對系統(tǒng)影響結(jié)果的不完善修正產(chǎn)生的。在計算測量結(jié)果的不確定度時,不會考慮到未被認(rèn)識的系統(tǒng)影響,但這種影響會導(dǎo)致誤差的出現(xiàn)。
2020-11-27 17:24:4410115 
測量不確定度,是近年來對測量結(jié)果的誤差表述。大家知道,任何測量都不可能絕對準(zhǔn)確,都必然有誤差,而誤差也不可能準(zhǔn)確知道。因此測量不確定度是對被測量的真值所處范圍的評定結(jié)果,所以在進(jìn)行測量的說明和使用測量結(jié)果時,都必須考慮測量不確定度。
2020-11-12 11:13:315029 機(jī)械加工誤差是指零件加工后的實際幾何參數(shù)(幾何尺寸、幾何形狀和相互位置)與理想幾何參數(shù)之間偏差的程度。零件加工后實際幾何參數(shù)與理想幾何參數(shù)之間的符合程度即為加工精度。加工誤差越小,符合程度越高,加工精度就越高。加工精度與加工誤差是一個問題的兩種提法。所以,加工誤差的大小反映了加工精度的高低。
2020-09-08 11:33:515761 隨著印制電路板技術(shù)的進(jìn)一步提高,對覆銅板厚度的偏差要求及平整度要求越來越高。然而,對于厚度偏差市場上也有很多誤解。現(xiàn)在對覆銅板厚度偏差相關(guān)知識進(jìn)行總結(jié),希望對初學(xué)者有所幫助。
2020-06-29 15:24:468194 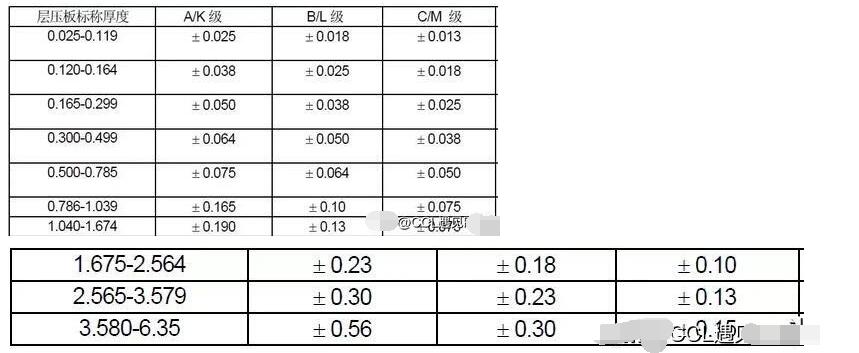
電壓偏差:供電系統(tǒng)在正常運(yùn)行方式下,某一節(jié)點(diǎn)的實際電壓與系統(tǒng)標(biāo)稱電壓之差對系統(tǒng)標(biāo)稱電壓的百分?jǐn)?shù),稱為該節(jié)點(diǎn)的電壓偏差。
2019-09-13 11:34:0025551 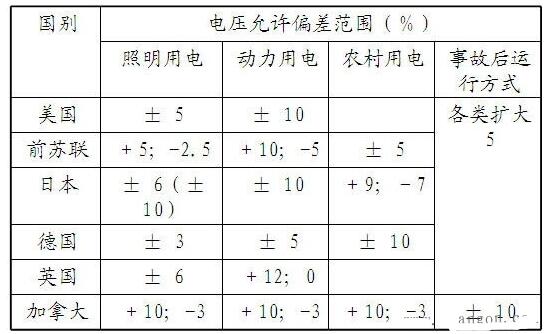
系統(tǒng)誤差,指的就是測量器具或方法引起的有規(guī)律的誤差,體現(xiàn)為與真值之間的偏差,如儀器零點(diǎn)誤差,經(jīng)年變化誤差,溫度、電磁場等環(huán)境條件引起的誤差,動力源引起的誤差等。這種誤差的值和符號保持不變,或測量條件
2019-07-01 16:25:17668 流量計測量結(jié)果減去被測量的真值所得的差,稱為測量誤差,簡稱誤差。 當(dāng)儀表發(fā)生誤差時可以采用以下方法進(jìn)行修正。
2019-06-25 16:14:053368 空偏置誤差只是慣性傳感器偏離零時的誤差正在經(jīng)歷無刺激 - 加速度計為零g或陀螺儀無旋轉(zhuǎn)。通常,所有傳感器都表現(xiàn)出至少兩種形式的零偏差誤差:初始零偏差誤差和由于溫度引起的零偏差誤差。
2019-04-10 10:04:113330 。定位模塊初始定位后一般不能立即從衛(wèi)星獲取閏秒修正值,需要等待一段時間,因此定位模塊剛定位后,輸出的時間有可能和UTC時間有偏差,可能不是正確的UTC時間——是否有偏差取決于定位模塊內(nèi)部保存的閏秒修正值
2018-12-27 22:28:4312613 在傳統(tǒng)的基于航位推算和卡爾曼濾波的室內(nèi)行人定位算法中,存在著航向誤差累積的問題,這使得位置誤差也會不斷累積。針對這個問題,提出了室內(nèi)環(huán)境約束的行人航向粒子濾波算法來修正方向誤差。首先,將室內(nèi)
2018-12-18 18:33:149 ,發(fā)現(xiàn)超差及時反饋,以調(diào)整容量修正值。 3、準(zhǔn)確確定卷繞容量中心值(也稱修正值) ,必須將熱(冷)壓、熱處理和包封等工序容量的變化率都納入芯子的容量修正值。 不同型號、 不同規(guī)格甚至不同臺卷繞機(jī)其修正值也不同。 4、卷
2018-08-14 09:14:293254 引入誤差。為了解決這種問題,現(xiàn)有大多數(shù)的方法是引入修正補(bǔ)償系數(shù),通過此修正補(bǔ)償系數(shù)對流量進(jìn)行校準(zhǔn)修正補(bǔ)償,從而減小計量誤差。
2018-08-02 09:41:002536 
由于 AD 的有限分辯率而引起的誤差?即有限分辯率 AD 的階梯狀轉(zhuǎn)移特性曲線與無限分辯率AD?理想 AD?的轉(zhuǎn)移特性曲線?直線?之間的最大偏差。通常是 1 個或半個最小數(shù)字量的模擬變化量?表示為 1LSB、1/2LSB。
2018-04-12 15:07:402 核分析能譜測量所用的多道脈沖幅度分析器,在進(jìn)行模數(shù)轉(zhuǎn)換時需要一定的時間,會使分析器產(chǎn)生漏計數(shù),給測量分析帶來誤差,需要對死時間進(jìn)行修正。針對這種情況,探討了兩種有效的死時間修正方法。核分析能譜測量
2018-04-09 11:11:4512 磁場探頭發(fā)射的電壓信號輸出(Uprobe),被頻譜分析儀分離成頻譜。磁場修正系數(shù)(KH)定義為:描述電壓信號和相關(guān)磁場(HRF)的關(guān)系。磁場(HRF)與電流(IRF)相關(guān),這樣,另一個修正系數(shù)基于電流(IRF)來定義。
2018-01-11 16:38:405710 針對無線傳感器網(wǎng)絡(luò)協(xié)作通信過程中誤差傳播對系統(tǒng)性能的影響,提出了一種基于機(jī)會式誤差修正的可靠傳輸機(jī)制。首先,在多節(jié)點(diǎn)協(xié)作無線傳感器網(wǎng)絡(luò)中建立三種協(xié)作傳輸方案,基于信道質(zhì)量和誤符號率建立協(xié)作誤差傳播
2017-11-29 10:08:500 ,用更高一級的標(biāo)準(zhǔn)器具測量所得之值。 一、測量誤差的表示方法 測量誤差有絕對誤差和相對誤差兩種表示方法。 1、絕對誤差是指被測量的測量值與其真值之差。與絕對誤差的大小相等,但符號相反的量值稱為修正值。絕對誤差
2017-11-23 15:51:181970 薄壁量熱計后壁面導(dǎo)熱損失的影響與誤差修正_楊慶濤
2017-03-19 18:58:370 硅壓阻式壓力傳感器誤差修正算法的FPGA實現(xiàn)_華振宇
2017-03-19 11:41:394 GNSS天線相位中心偏差檢測方法
2017-01-07 20:43:127 GPS一維彈道修正引信修正算法研究,下來看看
2016-12-17 17:01:466 GPS修正側(cè)向彈道偏差研究,可以下來看看
2016-12-17 16:33:3911 示波器用戶在進(jìn)行幅值/峰值等垂直量測量時,偶然遇到測量結(jié)果與預(yù)期稍有偏差,測量不夠準(zhǔn)確的問題,使用戶對示波器的測量精度產(chǎn)生了質(zhì)疑,在這里說說示波器幅值/峰值等垂直量測量為什么出現(xiàn)測量偏差,針對這種現(xiàn)象將如何改進(jìn)從而減少測量誤差。
2016-10-13 15:13:032444 本文首先對通道誤差進(jìn)行了建模,并推導(dǎo)得出通道間幅度誤差對波束指向的影響不大,但會使波束方向圖的主瓣增益降低,旁瓣電平升高;相位誤差不僅會使波束主瓣增益降低,旁瓣電平抬高,還會引起波束指向偏差,最后
2014-04-17 10:58:562488 水下GPS定位精度受到各種因素的影響,為得到精確的定位數(shù)據(jù),需要分析各因素與定位誤差的關(guān)系。文中介紹了水下GPS定位的系統(tǒng)組成和定位原理,詳細(xì)分析了影響定位誤差的各種因素
2013-07-24 15:33:5541 介紹了采用三次樣條曲線插值方法對稱重儀表的非線性誤差進(jìn)行修正的方法,該修正方法對于線性誤差較大的傳感器有很好的補(bǔ)償效果,在某些測量精度較高的場合采用三次樣條曲線插
2011-06-08 15:46:5125 修正穩(wěn)定時間電路可獲得它聲稱的性能。這些修正可粗略地分為四種預(yù)定類別。它們是:電流開關(guān)橋驅(qū)
2010-11-25 11:50:32862 掃描步長、掃描速度與X射線衍射峰形態(tài)偏差關(guān)系問題的來由所有的粉末衍射分析都來源于粉末衍射數(shù)據(jù)或者衍射圖。衍射圖的質(zhì)量好壞直接影響我們的物相鑒定、定量分
2010-10-02 11:31:2434 本設(shè)計指南探討了信號調(diào)理、調(diào)整和校準(zhǔn)電路,用于修正系統(tǒng)誤差,從而以合理的成本確保工業(yè)設(shè)備安全、精確。校準(zhǔn)部分討論了利用最終測試補(bǔ)償元件誤差,通過上電自測試和連
2010-07-30 11:34:328 本設(shè)計指南探討了信號調(diào)理、調(diào)整和校準(zhǔn)電路,用于修正系統(tǒng)誤差,從而以合理的成本確保工業(yè)設(shè)備安全、精確。校準(zhǔn)部分討論了利用最終測試補(bǔ)償元件誤差,通過上電自測試和連
2010-07-27 18:09:20628 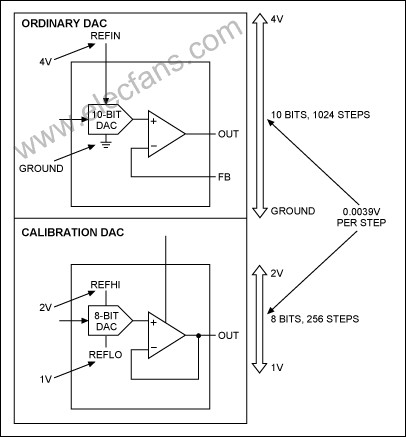
本設(shè)計指南探討了信號調(diào)理、調(diào)整和校準(zhǔn)電路,用于修正系統(tǒng)誤差,從而以合理的成本確保工業(yè)設(shè)備安全、精確。校準(zhǔn)部分討論了利用最終測試補(bǔ)償元件誤差,通過上電自測試和連
2010-07-24 12:08:27556 基于指數(shù)曲線模型的沉降修正系數(shù)推求摘要: 海堤工程地基沉降修正系數(shù)的正確選取, 關(guān)系到利用分層總和法計算地基沉降量的精度. 依據(jù)某圍墾工程原位監(jiān)測數(shù)
2010-04-24 09:39:229 惠斯登電橋接線端的修正值
和電勢差計一樣,如果希望得到較高的精度,就要考慮XY接頭處的接觸電阻。我們知道在電勢
2009-10-13 14:00:431279 
本文提出了一種基于新的優(yōu)化修正函數(shù)的模糊控制方法,該方法根據(jù)誤差E 和誤差變化EC 修改規(guī)則調(diào)整因子α,不僅體現(xiàn)了按誤差大小自動調(diào)節(jié)誤差E 對控制作用的權(quán)重,而且也考
2009-09-16 10:09:0614 Boost電路具有動態(tài)修正誤差的滑模變結(jié)構(gòu)控制
摘要:在滑模等價控制的基礎(chǔ)上,考慮實際控制中的非理想切換條件以及實際控制量的物理約束,提出了一種適
2009-07-25 10:43:18751 本文以Buck(降壓型)DC-DC變換器為例,提出了對數(shù)字PWM的PID控制器的兩種修正方式:死區(qū)控制方式,平均數(shù)字濾波控制方式。數(shù)字控制器根據(jù)輸出電壓誤差決定是否用該修正方式計
2009-07-07 14:31:40189 齒輪副的安裝誤差1.軸線的平行度誤差△fx 、△fy :≤平行度公差fx 、fy 2.齒輪副的中心距偏差△fa:實際中心距與公稱中心距之差。即:a’-a=△ fa規(guī)定:-fa ≤△fa
2009-05-14 23:33:2216 誤差的概念在一定條件下,被測量客觀存在的確定值,稱為真值。誤差是測量值與真值相差的程度。誤差公理:測量的過程必然存在著誤差,誤差自始
2008-09-18 01:08:012066 載流量修正系數(shù)
2008-06-28 01:33:331205
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論