 電子發燒友App
電子發燒友App


步進電機是將電脈沖信號轉變為角位移或線位移的開環控制電機,是現代數字程序控制系統中的主要執行元件,應用極為廣泛。在非超載的情況下,電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數,而不受負載變化的影響,當步進驅動器接收到一個脈沖信號,它就驅動步進電機按設定的方向轉動一個固定的角度,稱為“步距角”,它的旋轉是以固定的角度一步一步運行的。可以通過控制脈沖個數來控制角位移量,從而達到準確定位的目的;同時可以通過控制脈沖頻率來控制電機轉動的速度和加速度,從而達到調速的目的。
步進電機是一種感應電機,它的工作原理是利用電子電路,將直流電變成分時供電的,多相時序控制電流,用這種電流為步進電機供電,步進電機才能正常工作,驅動器就是為步進電機分時供電的,多相時序控制器。
雖然步進電機已被廣泛地應用,但步進電機并不能像普通的直流電機,交流電機在常規下使用。它必須由雙環形脈沖信號、功率驅動電路等組成控制系統方可使用。因此用好步進電機卻非易事,它涉及到機械、電機、電子及計算機等許多專業知識。步進電機作為執行元件,是機電一體化的關鍵產品之一,廣泛應用在各種自動化控制系統中。隨著微電子和計算機技術的發展,步進電機的需求量與日俱增,在各個國民經濟領域都有應用。
步進電機基本原理
工作原理
通常電機的轉子為永磁體,當電流流過定子繞組時,定子繞組產生一矢量磁場。該磁場會帶動轉子旋轉一角度,使得轉子的一對磁場方向與定子的磁場方向一致。當定子的矢量磁場旋轉一個角度。轉子也隨著該磁場轉一個角度。每輸入一個電脈沖,電動機轉動一個角度前進一步。它輸出的角位移與輸入的脈沖數成正比、轉速與脈沖頻率成正比。改變繞組通電的順序,電機就會反轉。所以可用控制脈沖數量、頻率及電動機各相繞組的通電順序來控制步進電機的轉動。
發熱原理
通常見到的各類電機,內部都是有鐵芯和繞組線圈的。繞組有電阻,通電會產生損耗,損耗大小與電阻和電流的平方成正比,這就是我們常說的銅損,如果電流不是標準的直流或正弦波,還會產生諧波損耗;鐵心有磁滯渦流效應,在交變磁場中也會產生損耗,其大小與材料,電流,頻率,電壓有關,這叫鐵損。銅損和鐵損都會以發熱的形式表現出來,從而影響電機的效率。步進電機一般追求定位精度和力矩輸出,效率比較低,電流一般比較大,且諧波成分高,電流交變的頻率也隨轉速而變化,因而步進電機普遍存在發熱情況,且情況比一般交流電機嚴重。
步進電機驅動電路
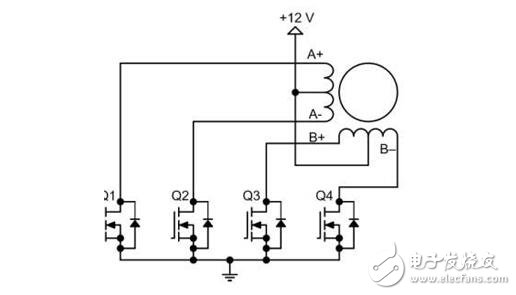
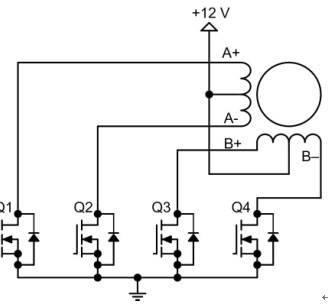
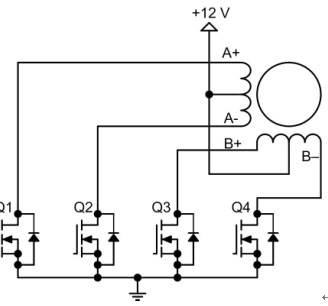
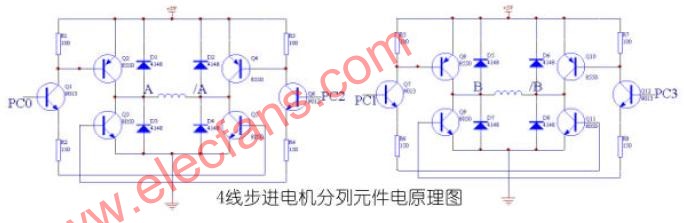
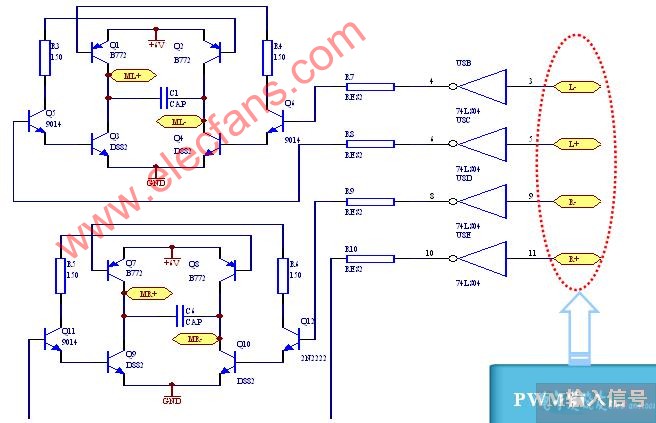
雙極性步進電機的驅動電路如圖所示,它會使用八顆晶體管來驅動兩組相位。雙極性驅動電路可以同時驅動四線式或六線式步進電機,雖然四線式電機只能使用雙極性驅動電路,它卻能大幅降低量產型應用的成本。雙極性步進電機驅動電路的晶體管數目是單極性驅動電路的兩倍,其中四顆下端晶體管通常是由微控制器直接驅動,上端晶體管則需要成本較高的上端驅動電路。雙極性驅動電路的晶體管只需承受電機電壓,所以它不像單極性驅動電路一樣需要箝位電路。
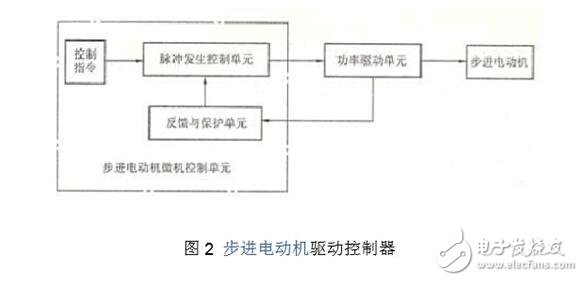
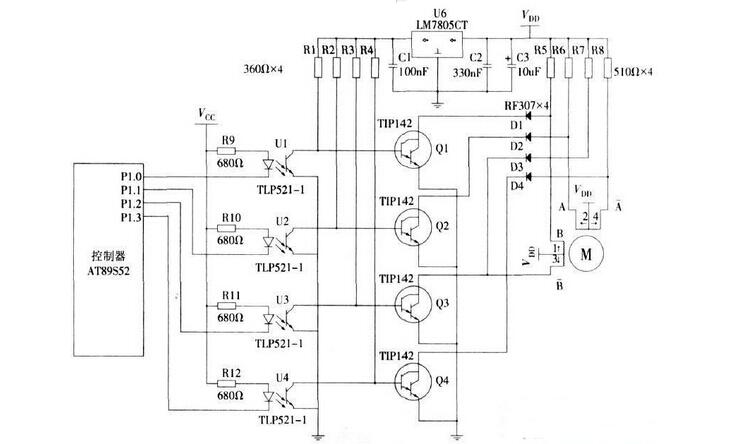
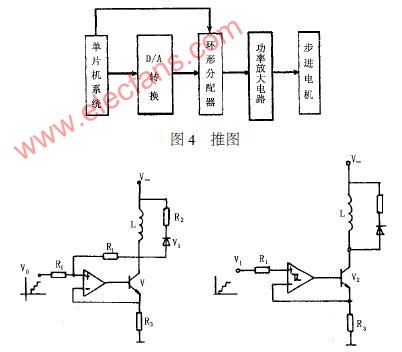
步進電動機不能直接接到工頻交流或直流電源上工作,而必須使用專用的步進電動機驅動器,如圖2所示,它由脈沖發生控制單元、功率驅動單元、保護單元等組成。圖中點劃線所包圍的二個單元可以用微機控制來實現。驅動單元與步進電動機直接耦合,也可理解成步進電動機微機控制器的功率接口,這里予以簡單介紹。
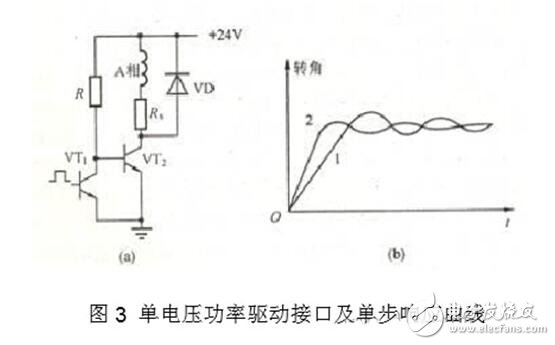
1. 單電壓功率驅動接口
實用電路如圖3所示。在電機繞組回路中串有電阻Rs,使電機回路時間常數減小,高頻時電機能產生較大的電磁轉矩,還能緩解電機的低頻共振現象,但它引起附加的損耗。一般情況下,簡單單電壓驅動線路中,Rs是不可缺少的。Rs對步進電動機單步響應的改善如圖3(b)。

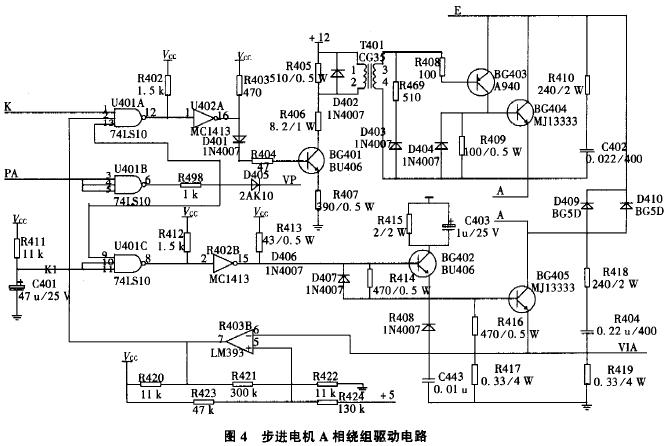
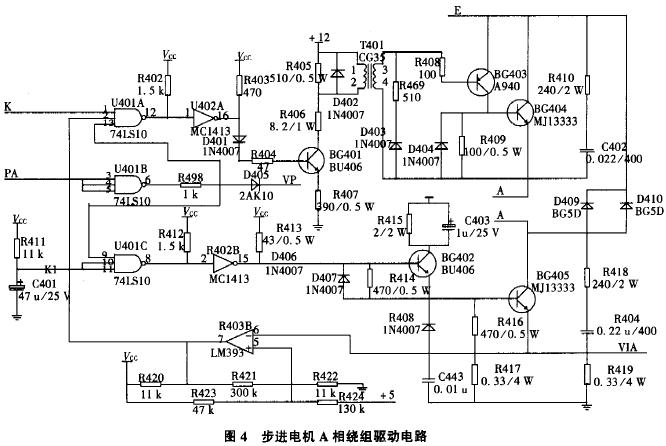
雙電壓驅動的功率接口如圖4所示。雙電壓驅動的基本思路是在較低(低頻段)用較低的電壓UL驅動,而在高速(高頻段)時用較高的電壓UH驅動。這種功率接口需要兩個控制信號,Uh為高壓有效控制信號,U為脈沖調寬驅動控制信號。圖中,功率管TH和二極管DL構成電源轉換電路。當Uh低電平,TH關斷,DL正偏置,低電壓UL對繞組供電。反之Uh高電平,TH導通,DL反偏,高電壓UH對繞組供電。這種電路可使電機在高頻段也有較大出力,而靜止鎖定時功耗減小。
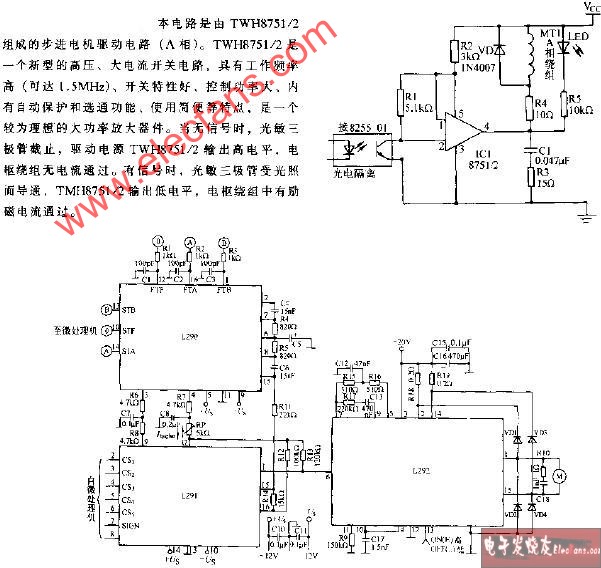
3.高低壓功率驅動接口

高低壓功率驅動接口如圖5所示。高低壓驅動的設計思想是,不論電機工作頻率如何,均利用高電壓UH供電來提高導通相繞組的電流前沿,而在前沿過后,用低電壓UL來維持繞組的電流。這一作用同樣改善了驅動器的高頻性能,而且不必再串聯電阻Rs,消除了附加損耗。高低壓驅動功率接口也有兩個輸入控制信號Uh和Ul,它們應保持同步,且前沿在同一時刻跳變,如圖5所示。圖中,高壓管VTH的導通時間tl不能太大,也不能太小,太大時,電機電流過載;太小時,動態性能改善不明顯。一般可取1~3ms。(當這個數值與電機的電氣時間常數相當時比較合適)。{{分頁}}
4.斬波恒流功率驅動接口
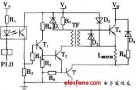
恒流驅動的設計思想是,設法使導通相繞組的電流不論在鎖定、低頻、高頻工作時均保持固定數值。使電機具有恒轉矩輸出特性。這是目前使用較多、效果較好的一種功率接口。圖6是斬波恒流功率接口原理圖。圖中R是一個用于電流采樣的小阻值電阻,稱為采樣電阻。當電流不大時,VT1和VT2同時受控于走步脈沖,當電流超過恒流給定的數值,VT2被封鎖,電源U被切除。由于電機繞組具有較大電感,此時靠二極管VD續流,維持繞組電流,電機靠消耗電感中的磁場能量產生出力。此時電流將按指數曲線衰減,同樣電流采樣值將減小。當電流小于恒流給定的數值,VT2導通,電源再次接通。如此反復,電機繞組電流就穩定在由給定電平所決定的數值上,形成小小的鋸齒波,如圖6所示。
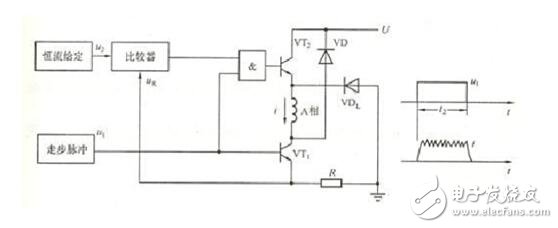
斬波恒流功率驅動接口也有兩個輸入控制信號,其中u1是數字脈沖,u2是模擬信號。這種功率接口的特點是:高頻響應大大提高,接近恒轉矩輸出特性,共振現象消除,但線路較復雜。目前已有相應的集成功率模塊可供采用。
5.升頻升壓功率驅動接口
為了進一步提高驅動系統的高頻響應,可采用升頻升壓功率驅動接口。這種接口對繞組提供的電壓與電機的運行頻率成線性關系。它的主回路實際上是一個開關穩壓電源,利用頻率-電壓變換器,將驅動脈沖的頻率轉換成直流電平,并用此電平去控制開關穩壓電源的輸入,這就構成了具有頻率反饋的功率驅動接口。
6.集成功率驅動接口
目前已有多種用于小功率步進電動機的集成功率驅動接口電路可供選用。
L298芯片是一種H橋式驅動器,它設計成接受標準TTL邏輯電平信號,可用來驅動電感性負載。H橋可承受46V電壓,相電流高達2.5A。L298(或XQ298,SGS298)的邏輯電路使用5V電源,功放級使用5~46V電壓,下橋發射極均單獨引出,以便接入電流取樣電阻。L298(等)采用15腳雙列直插小瓦數式封裝,工業品等級。它的內部結構如圖7所示。H橋驅動的主要特點是能夠對電機繞組進行正、反兩個方向通電。L298特別適用于對二相或四相步進電動機的驅動。{{分頁}}

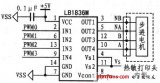
與L298類似的電路還有TER公司的3717,它是單H橋電路。SGS公司的SG3635則是單橋臂電路,IR公司的IR2130則是三相橋電路,Allegro公司則有A2916、A3953等小功率驅動模塊。
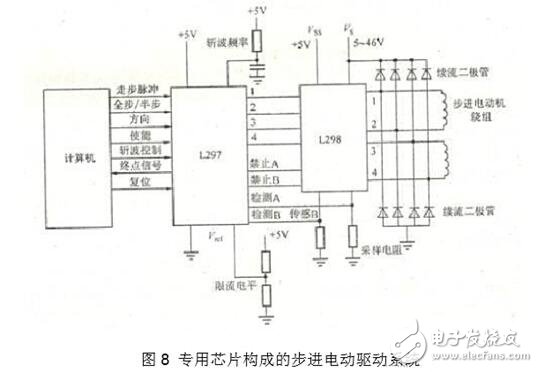
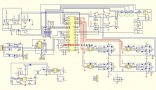
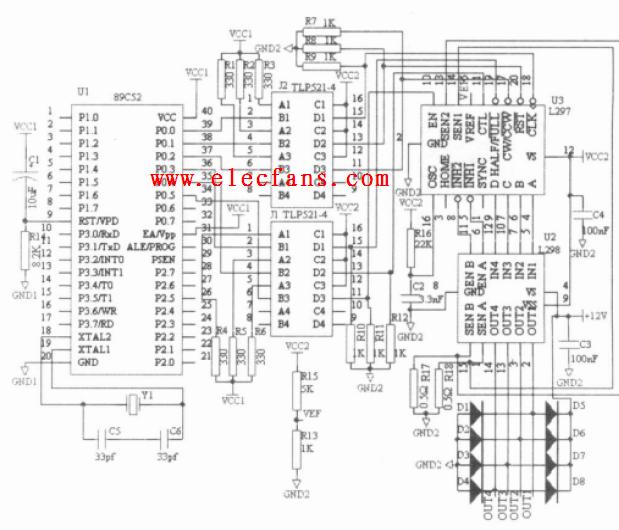
圖8是使用L297(環形分配器專用芯片)和L298構成的具有恒流斬波功能的步進電動機驅動系統。
步進電機驅動電路的性能比較及電路實例
1、性能比較
比較上述驅動電路的
基本性能可概括如下。
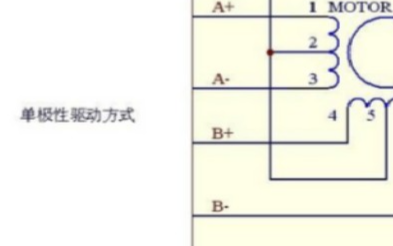
(1)單極性驅動電路:這里指單電源、單極性驅動電路,每相只用一只功率管。線路簡單、成本低,但效率也低,啟動和運行頻率均不高。現常用來驅動小功率步進電機。
(2)雙極性驅動電路:線路復雜,效率高。常用來驅動永磁式電機、混合式電機或大功率電機。
(3)高低壓驅動電路:線路較簡單。雙電源,每相需要兩只功率管。效率較高,啟動和運行頻率比單極性電路高。
(4)斬波驅動電路:雙電源成高壓單電源。運行特性好,效率高,但線路復雜。
(5)調頻調壓驅動電路:控制電路較復雜。因為V隨f改變,所以,效率、運行特性等都有了明顯改善。
(6)細分驅動電路:線路復雜。運行特性好。微機的應用已使它成為很有發展前途的驅動方式之一。
2、驅動電路實例
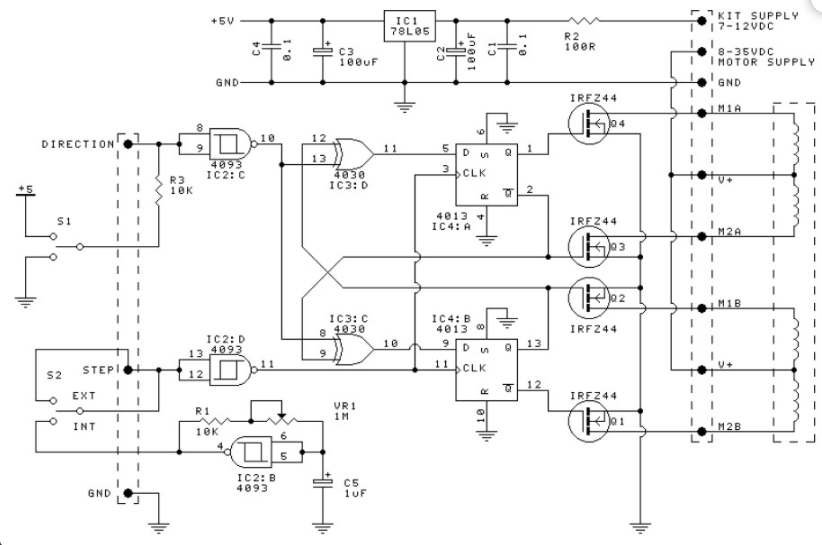
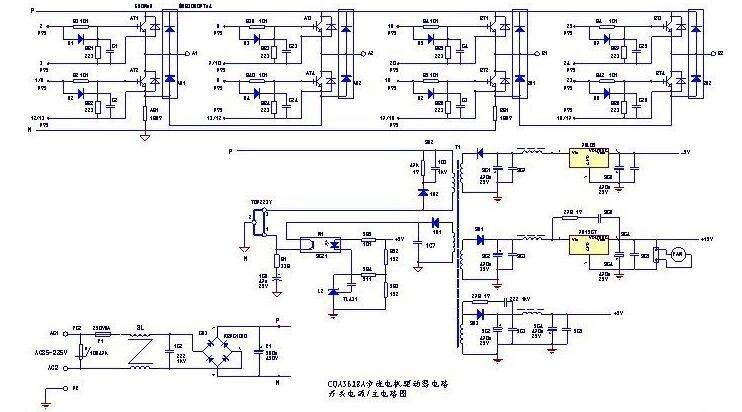
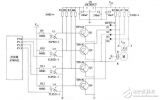
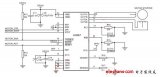
(1) 圖1是斬波驅動的一個應用實例。被驅動的電機是36By3-30型三相步進電機。它的A、B、C三相分別接在圖示電路的A、B、C端。A、B、C三端的輸入分別接電路的D03、D02、DO1。
該電路有兩種工作狀態:(1)步進方式;(2)維持方式。處在步進工作方式時,流過取樣電阻R0和相繞組上的電流為2A;處在維持方式時,僅為0.5A。工作方式的轉換受程序控制。該程序送“1”給DO5時,則為步進方式。送“0”時,為維持方式。

實際上,是用DO5電位的高低改變比較器比較基準端“2”的電位。DO5電位高,“2”端電位抬高,則比較器“3”端的翻轉電位也隨之提高。即取樣
電阻R0上的電壓隨之提高,流過R0的平均電流相應增大。反之,‘2”端電位降低,流過R0的平均電流相應減小。
斬波驅動由比較器、比較器后面的放大電路、L、C、R等電路形成。假設比較器的“3”端電位高于“2”端,它的輸出為低電位。由三極管組成的放大電路截止,加到相繞組上的電壓逐步衰減,流過R0上的電流和iR0也隨之降低。經過一定時間后,“3”端電位低于“2”端。經比較器比較后,輸出高電位。(http://www.diangon.com/版權所有)放大電路的輸出電壓升高。流過取樣電阻R0上的電流以回路時間常數所決定的規律逐步上升,R0上的壓降iR0也隨之上升。當“3” 端電位再一次高于“2”端時,比較器的輸出再次變低。如此循環,形成斬波輸出。
驅動電路的另外3個輸入端DO1、D02、D03受程序控制,用來決定步進電機的正反向旋轉。正轉時,以ABC→ABC→ABC→ABC→ABC→ABC→ABC→…方式工作;反轉時,以ABC→ABC→ABC→ABC→ABC→ABC→ABC→…方式工作。
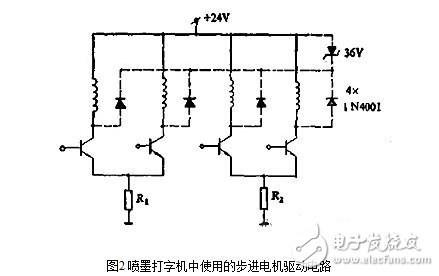
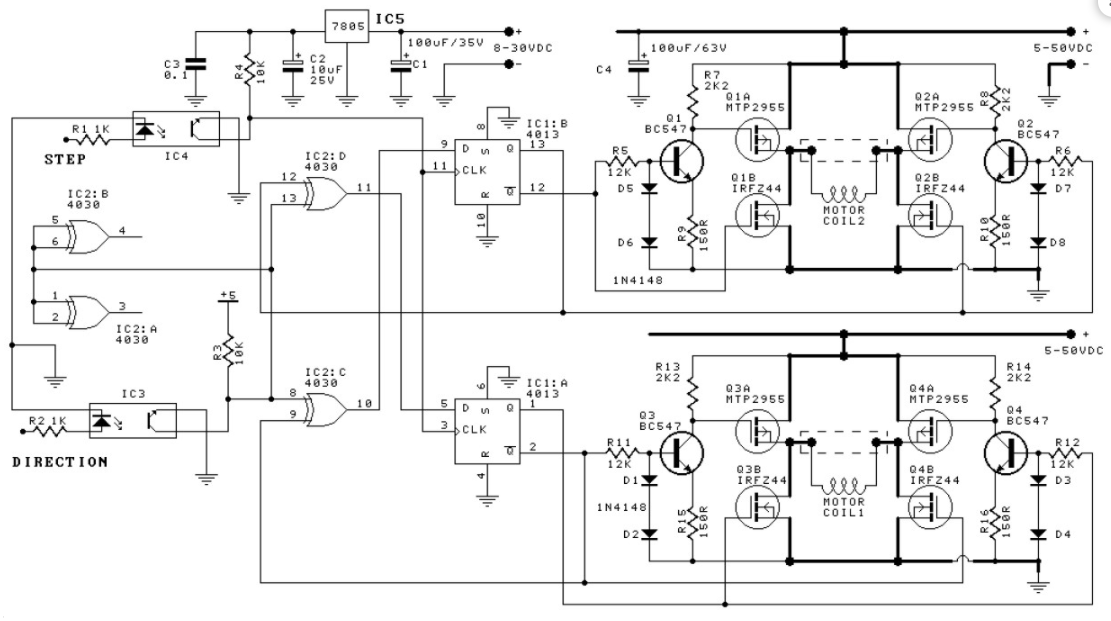
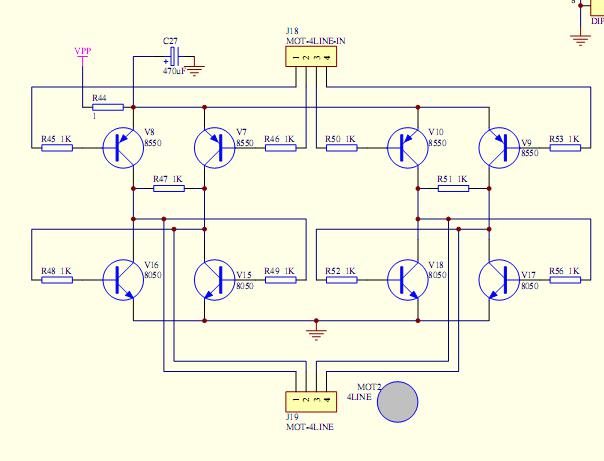
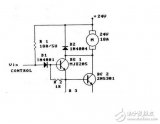
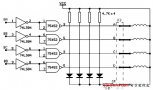
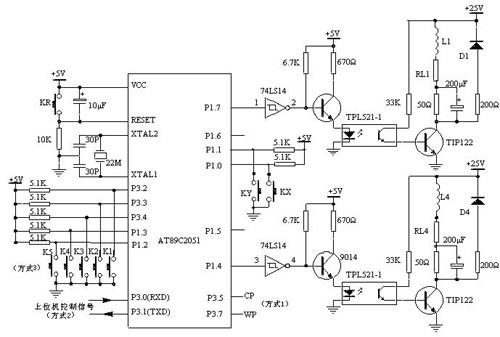
(2)圖2是噴墨打字機中使用的驅動電路。被驅動的是四相步進電機,步距角為3.6°。驅動電路由四只二極管、四只晶體管、兩組雙線繞組、兩只限流電阻和一只36V穩壓管組成。穩壓管以圖示方式與二極管串聯后,并聯在線圈兩端。這種方式與單純并二極甘或并二極管-電阻相比,能在晶體管截止之后,使回路電流衰減得更迅速。除此之外,截止后,加在集電極上的最高電壓是電源電壓加穩壓管的穩定電壓,而與電流無關。在圖示電路中,為60V。這使得決定最
大集電極電壓的額定值變得很容易。圖中的串聯電阻主要是為了迅速建立激磁電流和改善轉矩特性而設。設繞組電阻為Rw,串聯電阻為R;則串聯R后,電路的時間常數將從L/Rw減少為L/(Rw+R)。











 工商網監
工商網監
評論