 電子發(fā)燒友App
電子發(fā)燒友App


步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即給電機(jī)加一個(gè)脈沖信號(hào),電機(jī)則轉(zhuǎn)過(guò)一個(gè)步距角。這一線性關(guān)系的存在,加上步進(jìn)電機(jī)只有周期性的誤差而無(wú)累積誤差等特點(diǎn)。使得在速度、位置等控制領(lǐng)域用步進(jìn)電機(jī)來(lái)控制變的非常的簡(jiǎn)單。
步進(jìn)電機(jī)是一種感應(yīng)電機(jī),它的工作原理是利用電子電路,將直流電變成分時(shí)供電的,多相時(shí)序控制電流,用這種電流為步進(jìn)電機(jī)供電,步進(jìn)電機(jī)才能正常工作,驅(qū)動(dòng)器就是為步進(jìn)電機(jī)分時(shí)供電的,多相時(shí)序控制器。
雖然步進(jìn)電機(jī)已被廣泛地應(yīng)用,但步進(jìn)電機(jī)并不能像普通的直流電機(jī),交流電機(jī)在常規(guī)下使用。它必須由雙環(huán)形脈沖信號(hào)、功率驅(qū)動(dòng)電路等組成控制系統(tǒng)方可使用。因此用好步進(jìn)電機(jī)卻非易事,它涉及到機(jī)械、電機(jī)、電子及計(jì)算機(jī)等許多專業(yè)知識(shí)。步進(jìn)電機(jī)作為執(zhí)行元件,是機(jī)電一體化的關(guān)鍵產(chǎn)品之一,廣泛應(yīng)用在各種自動(dòng)化控制系統(tǒng)中。隨著微電子和計(jì)算機(jī)技術(shù)的發(fā)展,步進(jìn)電機(jī)的需求量與日俱增,在各個(gè)國(guó)民經(jīng)濟(jì)領(lǐng)域都有應(yīng)用。
步進(jìn)電機(jī)從其結(jié)構(gòu)形式上可分為反應(yīng)式步進(jìn)電機(jī)(Variable Reluctance,VR)、永磁式步進(jìn)電機(jī)Permanent Magnet,PM)、混合式步進(jìn)電機(jī)(Hybrid Stepping,HS)、單相步進(jìn)電機(jī)、平面步進(jìn)電機(jī)等多種類型,在我國(guó)所采用的步進(jìn)電機(jī)中以反應(yīng)式步進(jìn)電機(jī)為主。步進(jìn)電機(jī)的運(yùn)行性能與控制方式有密切的關(guān)系,步進(jìn)電機(jī)控制系統(tǒng)從其控制方式來(lái)看,可以分為以下三類:開環(huán)控制系統(tǒng)、閉環(huán)控制系統(tǒng)、半閉環(huán)控制系統(tǒng)。半閉環(huán)控制系統(tǒng)在實(shí)際應(yīng)用中一般歸類于開環(huán)或閉環(huán)系統(tǒng)中。[1]
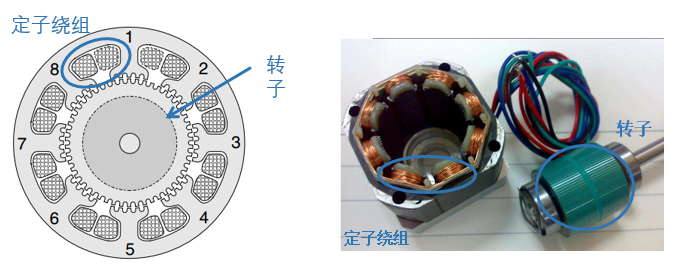
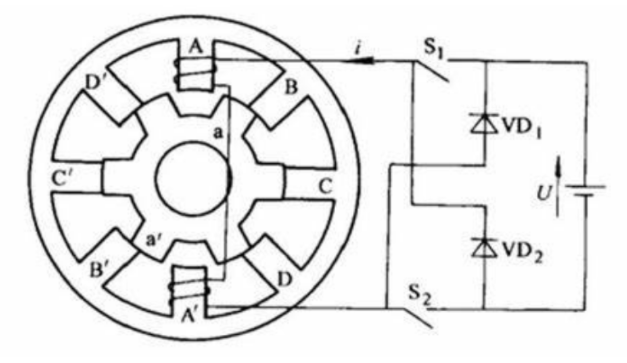
反應(yīng)式:定子上有繞組、轉(zhuǎn)子由軟磁材料組成。結(jié)構(gòu)簡(jiǎn)單、成本低、步距角小,可達(dá)1.2°、但動(dòng)態(tài)性能差、效率低、發(fā)熱大,可靠性難保證。
永磁式:永磁式步進(jìn)電機(jī)的轉(zhuǎn)子用永磁材料制成,轉(zhuǎn)子的極數(shù)與定子的極數(shù)相同。其特點(diǎn)是動(dòng)態(tài)性能好、輸出力矩大,但這種電機(jī)精度差,步矩角大(一般為7.5°或15°)。
混合式:混合式步進(jìn)電機(jī)綜合了反應(yīng)式和永磁式的優(yōu)點(diǎn),其定子上有多相繞組、轉(zhuǎn)子上采用永磁材料,轉(zhuǎn)子和定子上均有多個(gè)小齒以提高步矩精度。其特點(diǎn)是輸出力矩大、動(dòng)態(tài)性能好,步距角小,但結(jié)構(gòu)復(fù)雜、成本相對(duì)較高。
按定子上繞組來(lái)分,共有二相、三相和五相等系列。最受歡迎的是兩相混合式步進(jìn)電機(jī),約占97%以上的市場(chǎng)份額,其原因是性價(jià)比高,配上細(xì)分驅(qū)動(dòng)器后效果良好。該種電機(jī)的基本步距角為1.8°/步,配上半步驅(qū)動(dòng)器后,步距角減少為0.9°,配上細(xì)分驅(qū)動(dòng)器后其步距角可細(xì)分達(dá)256倍(0.007°/微步)。由于摩擦力和制造精度等原因,實(shí)際控制精度略低。同一步進(jìn)電機(jī)可配不同細(xì)分的驅(qū)動(dòng)器以改變精度和效果。
步進(jìn)電機(jī)的技術(shù)參數(shù)
1、步進(jìn)電機(jī)的基本參數(shù)
(1) 空載啟動(dòng)頻率:
即步進(jìn)電機(jī)在空載情況下能夠正常啟動(dòng)的脈沖頻率,如果脈沖頻率高于該值,電機(jī)不能正常啟動(dòng),可能發(fā)生丟步或堵轉(zhuǎn)。在有負(fù)載的情況下,啟動(dòng)頻率更低。如果要使電機(jī)達(dá)到高速轉(zhuǎn)動(dòng),脈沖頻率應(yīng)該有加速過(guò)程,即啟動(dòng)頻率較低,然后一定加速度升到所希望的高頻(電機(jī)轉(zhuǎn)速?gòu)牡退偕礁咚伲?/p>
(2) 電機(jī)固有步距角:
它表示控制系統(tǒng)每發(fā)一個(gè)步進(jìn)脈沖信號(hào),電機(jī)所轉(zhuǎn)動(dòng)的角度。電機(jī)出廠時(shí)給出了一個(gè)步距角的值,如86BYG250A型電機(jī)給出的值為0.9°/1.8°(表示半步工作時(shí)為0.9°、整步工作時(shí)為1.8°),這個(gè)步距角可以稱之為‘電機(jī) 固有步距角’, 它不一定是電機(jī)實(shí)際工作時(shí)的真正步距角,真正的步距角和驅(qū)動(dòng)器有關(guān)。
(3) 步進(jìn)電機(jī)的相數(shù):
是指電機(jī)內(nèi)部的線圈組數(shù),目前常用的有二相、三相、四相、五相步進(jìn)電機(jī)。電機(jī)相數(shù)不同,其步距角也不同,一般二相電機(jī)的步距角為0.9°/1.8°、三相的 為0.75°/1.5°、五相的為0.36°/0.72°。在沒有細(xì)分驅(qū)動(dòng)器時(shí),用戶主要靠選擇不同相數(shù)的步進(jìn)電機(jī)來(lái)滿足自己步距角的要求。如果使用細(xì)分驅(qū)動(dòng)器,則‘相數(shù)’將變得沒有意義,用戶只需在驅(qū)動(dòng)器上改變細(xì)分?jǐn)?shù),就可以改變步距角。
(4) 保持轉(zhuǎn)矩(HOLDING TORQUE):是指步進(jìn)電機(jī)通電但沒有轉(zhuǎn)動(dòng)時(shí),定子鎖住轉(zhuǎn)子的力矩。它是步進(jìn)電機(jī)最重要的參數(shù)之一,通常步進(jìn)電機(jī)在低速時(shí)的力矩接近保持轉(zhuǎn)矩。由于步進(jìn)電機(jī)的輸出力 矩隨速度的增大而不斷衰減,輸出功率也隨速度的增大而變化,所以保持轉(zhuǎn)矩就成為了衡量步進(jìn)電機(jī)最重要的參數(shù)之一。比如,當(dāng)人們說(shuō)2N.m的步進(jìn)電機(jī),在沒有特殊說(shuō)明的情況下是指保持轉(zhuǎn)矩為2N.m的步進(jìn)電機(jī)。
2、步進(jìn)電機(jī)動(dòng)態(tài)指標(biāo)及術(shù)語(yǔ):
(1) 步距角精度: 步進(jìn)電機(jī)每轉(zhuǎn)過(guò)一個(gè)步距角的實(shí)際值與理論值的誤差。用百分表示:誤差/步距角*100%。不同運(yùn)行拍數(shù)其值不同, 四拍運(yùn)行時(shí)應(yīng)在5%之內(nèi),八拍運(yùn)行時(shí)應(yīng)在15%以內(nèi)。
(2) 失步: 電機(jī)運(yùn)轉(zhuǎn)時(shí)運(yùn)轉(zhuǎn)的步數(shù),不等于理論上的步數(shù)。稱之為失步。
(3) 失調(diào)角:轉(zhuǎn)子齒軸線偏移定子齒軸線的角度,電機(jī)運(yùn)轉(zhuǎn)必存在失調(diào)角,由失調(diào)角產(chǎn)生的誤差,采用細(xì)分驅(qū)動(dòng)是不能解決的。
(4) 最大空載起動(dòng)頻率: 電機(jī)在某種驅(qū)動(dòng)形式、電壓及額定電流下,在不加負(fù)載的情況下,能夠直接起動(dòng)的最大頻率。
(5) 最大空載的運(yùn)行頻率:電機(jī)在某種驅(qū)動(dòng)形式,電壓及額定電流下,電機(jī)不帶負(fù)載的最高轉(zhuǎn)速頻率。
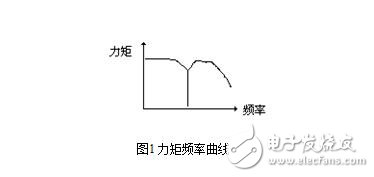
(6) 運(yùn)行矩頻特性:電機(jī)在某種測(cè)試條件下測(cè)得運(yùn)行中輸出力矩與頻率關(guān)系的曲線稱為運(yùn)行矩特性,這是電機(jī)諸多動(dòng)態(tài)曲線中最重要的,也是電機(jī)選擇的根本依據(jù)。如下 圖1所示:
(7) 電機(jī)的共振點(diǎn):
步進(jìn)電機(jī)均有固定的共振區(qū)域,二、四相感應(yīng)子式步進(jìn)電機(jī)的共振區(qū)一般在180-250pps之間(步距角1.8度)或在400pps左右(步距角為0.9度),電機(jī)驅(qū)動(dòng)電壓越高,電機(jī)電流越大,負(fù)載越輕,電機(jī)體積越小,則共振區(qū)向上偏移,反之亦然,為使電機(jī)輸出電矩大,不失步和整個(gè)系統(tǒng)的噪音降低,一般工作點(diǎn)均應(yīng)偏移共振區(qū)較多。
其它特性還有慣頻特性、起動(dòng)頻率特性等。電機(jī)一旦選定,電機(jī)的靜力矩確定而動(dòng)態(tài)力矩卻不然,電機(jī)的動(dòng)態(tài)力矩取決于電機(jī)運(yùn)行時(shí)的平均電流(而非靜態(tài)流)平均電流越大,電機(jī)輸出力矩越大,即電機(jī)的頻率特性越硬。如下圖2所示:
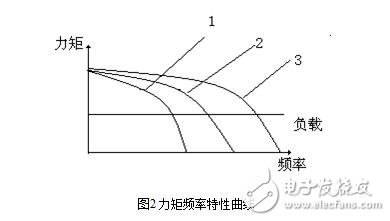
其中,曲線3電流最大、或電壓最高;曲線1電流最小、或電壓最低,曲線與負(fù)載的交點(diǎn)為負(fù)載的最大速度點(diǎn)。要使平均電流大,盡可能提高驅(qū)動(dòng)電壓,使采用小電感大電流的電機(jī)。
步進(jìn)電機(jī)的控制與應(yīng)用
步進(jìn)電機(jī)的開環(huán)控制
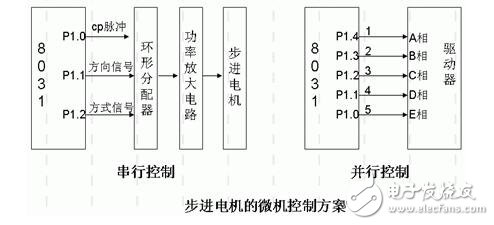
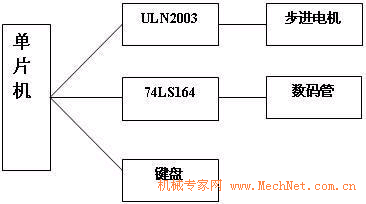
1、步進(jìn)電機(jī)的硬件控制
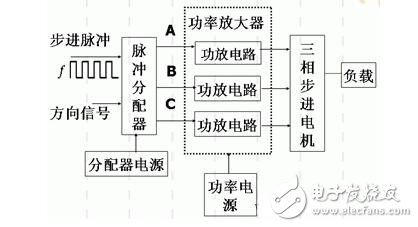
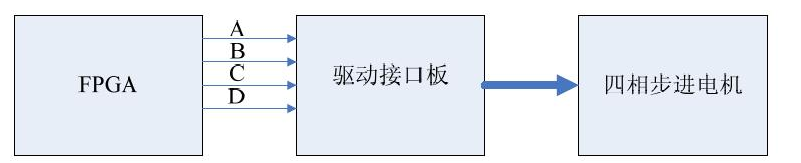
(1)脈沖分配器
當(dāng)方向電平為低時(shí),脈沖分配器的輸出按A-B-C的順序循環(huán)產(chǎn)生脈沖。
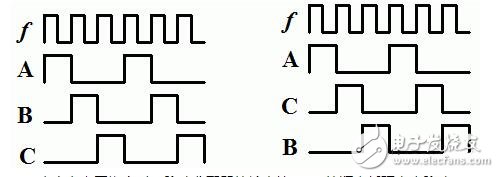
當(dāng)方向電平為高時(shí),脈沖分配器的輸出按A-C-B的順序循環(huán)產(chǎn)生脈沖。
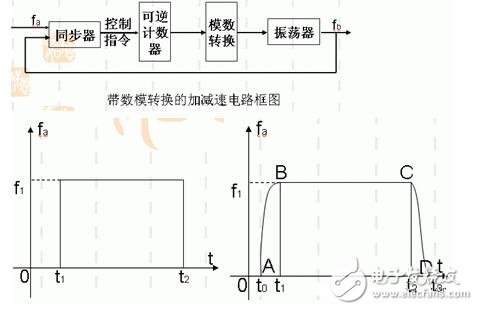
(2)加、減速控制:
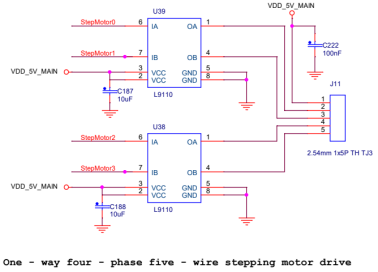
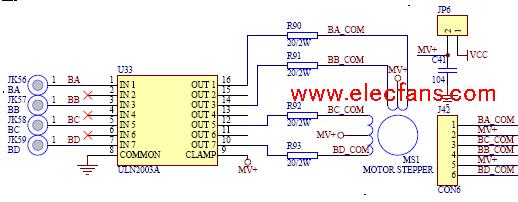
(3)功率放大器
將脈沖分配器的輸出信號(hào)進(jìn)行電流放大后給電動(dòng)機(jī)的定子繞組供電,使電動(dòng)機(jī)的轉(zhuǎn)子產(chǎn)生輸出轉(zhuǎn)矩。
2.步進(jìn)電機(jī)的微機(jī)控制:
目前,伺服系統(tǒng)的數(shù)字控制大都是采用硬件與軟件相結(jié)合的控制方式,其中軟件控制方式一般是利用微機(jī)實(shí)現(xiàn)的。這是因?yàn)榛谖C(jī)實(shí)現(xiàn)的數(shù)字伺服控制器與模擬伺服控制器相比,具有下列優(yōu)點(diǎn):
(1)能明顯地降低控制器硬件成本。速度更快、功能更新的新一代微處理機(jī)不斷涌現(xiàn),硬件費(fèi)用會(huì)變得很便宜。體積小、重量輕、耗能少是它們的共同優(yōu)點(diǎn)。
(2)可顯著改善控制的可靠性。集成電路和大規(guī)模集成電路的平均無(wú)故障時(shí)(MTBF)大大長(zhǎng)于分立元件電子電路。
(3)數(shù)字電路溫度漂移小,也不存在參數(shù)的影響,穩(wěn)定性好。
(4)硬件電路易標(biāo)準(zhǔn)化。在電路集成過(guò)程中采用了一些屏蔽措施,可以避免電力電子電路中過(guò)大的瞬態(tài)電流、電壓引起的電磁干擾問(wèn)題,因此可靠性比較高。
(5)采用微處理機(jī)的數(shù)字控制,使信息的雙向傳遞能力大大增強(qiáng),容易和上位系統(tǒng)機(jī)聯(lián)運(yùn),可隨時(shí)改變控制參數(shù)。
(6)可以設(shè)計(jì)適合于眾多電力電子系統(tǒng)的統(tǒng)一硬件電路,其中軟件可以模塊化設(shè)計(jì),拼裝構(gòu)成適用于各種應(yīng)用對(duì)象的控制算法;以滿足不同的用途。軟件模塊可以方便地增加、更改、刪減,或者當(dāng)實(shí)際系統(tǒng)變化時(shí)徹底更新。
(7)提高了信息存貯、監(jiān)控、診斷以及分級(jí)控制的能力,使伺服系統(tǒng)更趨于智能化。
(8)隨著微機(jī)芯片運(yùn)算速度和存貯器容量的不斷提高,性能優(yōu)異但算法復(fù)雜的控制策略有了實(shí)現(xiàn)的基礎(chǔ)。
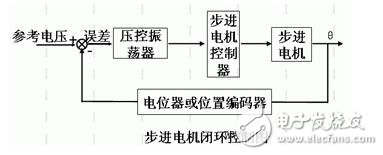
步進(jìn)電機(jī)的閉環(huán)控制











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論