 電子發(fā)燒友App
電子發(fā)燒友App


無刷直流電機由電動機主體和驅(qū)動器組成,是一種典型的機電一體化產(chǎn)品。 無刷電機是指無電刷和換向器(或集電環(huán))的電機,又稱無換向器電機。早在十九紀誕生電機的時候,產(chǎn)生的實用性電機就是無刷形式,即交流鼠籠式異步電動機,這種電動機得到了廣泛的應(yīng)用。但是,異步電動機有許多無法克服的缺陷,以致電機技術(shù)發(fā)展緩慢。上世紀中葉誕生了晶體管,因而采用晶體管換向電路代替電刷與換向器的直流無刷電機就應(yīng)運而生了。這種新型無刷電機稱為電子換向式直流電機,它克服了第一代無刷電機的缺陷。
無刷直流電機的控制策略
一般的自同步無刷直流電動機逆變器和驅(qū)動的結(jié)構(gòu)圖如圖1所示。圖中所示之驅(qū)動系統(tǒng)通常較多用于電壓源逆變器(VSI)。電壓源逆變器的對應(yīng)是電流源逆變器(CSI)。VSI之所以較為廣泛運用是因為其成本、重量、動態(tài)性能,以及易于控制均優(yōu)于CSI。兩種逆變器重量和成本的差異是由于VSI采用電容器進行直流耦合,而CSI須要在整流器和逆變器之間接有笨重的電抗器。VSI在動態(tài)響應(yīng)能力上也與CSI不同。由于大的電抗器的作用就是滿足CSI作為恒流源的較大的換向重疊角的需要,防止電機繞組中電流的快速變化,抑制電機的高速伺服運行。這就會加大驅(qū)動系統(tǒng)中阻尼器的尺寸。對于CSI所期望得到的恒流控制和恒轉(zhuǎn)矩控制性能,在VSI中,也可通過其內(nèi)部的電流控制環(huán)中滯后型電流控制而近似得到。
術(shù)語“自同步”指的是為了定子相電流脈沖與電機各相反電勢一致所需正確的各管導通順序,驅(qū)動電路對即時轉(zhuǎn)子位置信息的要求。
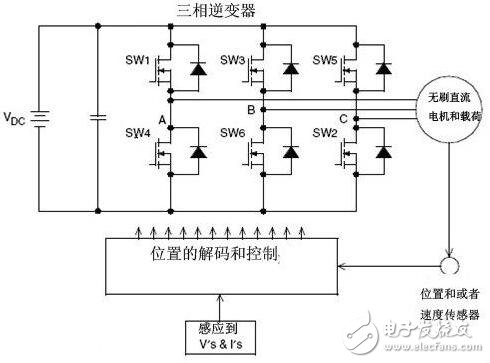
圖1基本的無刷直流電動機驅(qū)動
圖2是無刷直流電動機一經(jīng)典的位置和轉(zhuǎn)速控制方案的方框圖。如果僅僅期望轉(zhuǎn)速控制,可以將位置控制器和位置反饋電路去掉。通常在高性能的位置控制器中位置和轉(zhuǎn)速傳感器都是需要的。如果僅有位置傳感器而沒有轉(zhuǎn)速傳感器,那就要求檢測位置信號的差異,在模擬系統(tǒng)中就要導致噪聲的放大;而在數(shù)字系統(tǒng)中這不是問題。對于位置和轉(zhuǎn)速控制的無刷直流電動機,位置傳感器或者是其他獲取轉(zhuǎn)子位置信息的元件是一定要的。
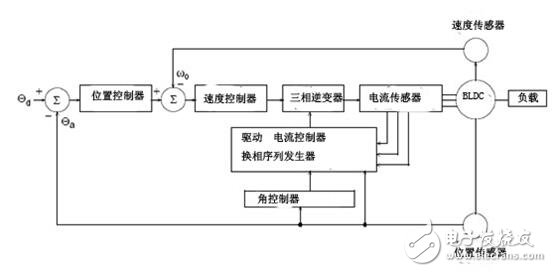
圖2經(jīng)典轉(zhuǎn)速和位置控制無刷直流電動機系統(tǒng)方框圖
許多高性能的應(yīng)用場合為了轉(zhuǎn)矩控制還需要電流反饋。至少,需要匯線電流反饋來防止電機和驅(qū)動系統(tǒng)過流。當添加一內(nèi)電流閉環(huán)控制就能實現(xiàn)非常快的電流源逆變器那樣的性能,而不需要直流耦合電抗器,它被稱為電流調(diào)節(jié)電壓源逆變器。驅(qū)動中的直流電壓調(diào)節(jié)也可由作用類似直流電源的可控整流器來實現(xiàn),或者既可通過在變換器中將PWM信號同時加在上下開關(guān),也可通過僅僅加在上開關(guān)或下開關(guān)來實現(xiàn)。
無刷直流電機仿人智能系統(tǒng)設(shè)計
無刷直流電機(BLDC)是一種多變量和非線性系統(tǒng),其利用電子換向器取代了機械電刷和機械換向器,因此這種電機不僅保留了直流電機的優(yōu)點,而且又具有交流電動機的結(jié)構(gòu)簡單、運行可靠、維護方便等優(yōu)點,使它一經(jīng)出現(xiàn)就以極快的速度發(fā)展和普及。本文在分析了無刷直流電機數(shù)學模型的基礎(chǔ)上,建立了基于仿人智能控制的雙閉環(huán)控制系統(tǒng),轉(zhuǎn)速環(huán)采用基于速度特征狀態(tài)多模態(tài)控制的仿人智能控制算法,電流環(huán)采用傳統(tǒng)PI控制算法。
在Matlab平臺上建立了基于仿人智能控制的無刷直流電機雙閉環(huán)系統(tǒng)的仿真模型,包括仿人智能速度控制器模塊、PI電流控制器模塊、換相邏輯模塊、電流采樣模塊和電機本體模塊。通過在線調(diào)整、仿真并與其他控制算法相比較,仿真實驗結(jié)果表明:仿人智能控制具有更好的動、靜態(tài)性能。
隨著對控制精度以及控制系統(tǒng)的穩(wěn)態(tài)和動態(tài)性能要求的提高,對無刷直流電機采用傳統(tǒng)的PID控制器往往難以滿足系統(tǒng)的性能要求。國內(nèi)外眾多學者在研究無刷直流電機的各種智能控制算法上取得了一定成果,然而目前無刷直流電機的各種智能控制算法還存在控制算法復雜、參數(shù)優(yōu)化等方面的問題。
仿人智能控制是直接對人的控制經(jīng)驗、技巧和各種直覺推理邏輯進行測辨、概括和總結(jié),并將其編制成簡單、精度高、能實時運行的控制算法。仿人智能控制方法具有多模態(tài)多控制器的結(jié)構(gòu),將其應(yīng)用于無刷直流電機的控制能夠較好地解決當前該領(lǐng)域控制器結(jié)構(gòu)復雜、調(diào)節(jié)困難、響應(yīng)遲鈍和不利于在線實現(xiàn)等問題。
本文所設(shè)計的無刷直流電機的反電動勢的為 120°梯形波,電流為方波,工作在兩相導通星形三相六狀態(tài)。設(shè)計的無刷直流電機控制系統(tǒng)為雙閉環(huán)控制系統(tǒng),如圖1所示。
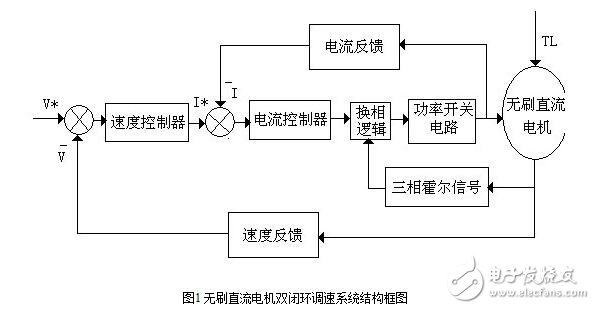
該系統(tǒng)可以達到無刷直流電機轉(zhuǎn)速輸出值穩(wěn)、快、準的跟隨轉(zhuǎn)速給定值的控制效果。控制系統(tǒng)設(shè)置轉(zhuǎn)速和電流兩個控制器,控制器實行串級連接。速度控制器采用具有基于速度特征狀態(tài)的多模態(tài)控制結(jié)構(gòu)的仿人智能控制器,增強了系統(tǒng)抗負載擾動能力,保證了系統(tǒng)靜態(tài)和動態(tài)跟蹤的性能,同時也確保了控制系統(tǒng)的魯棒性。
速度控制器是雙閉環(huán)調(diào)速系統(tǒng)的主導控制器,它使轉(zhuǎn)速快速地跟隨給定電壓變化,穩(wěn)態(tài)時可減小轉(zhuǎn)速誤差。速度控制器性能的優(yōu)劣直接影響到整個控制系統(tǒng)的控制效果。本文所設(shè)計的雙閉環(huán)控制系統(tǒng),速度控制器采用具有基于速度特征狀態(tài)的多模態(tài)控制結(jié)構(gòu)的仿人智能控制器,增強了系統(tǒng)抗負載擾動能力,保證了系統(tǒng)靜態(tài)和動態(tài)跟蹤的性能,同時也確保了控制系統(tǒng)的魯棒性。
電流控制器作為內(nèi)環(huán)控制器,在外環(huán)轉(zhuǎn)速控制器的調(diào)節(jié)過程中,它的作用是使電流緊緊跟隨外環(huán)控制器的輸出量變化,同時保證獲得電機允許的最大電流,從而加快系統(tǒng)的動態(tài)過程。本文所設(shè)計的雙閉環(huán)系統(tǒng)主要目標是對轉(zhuǎn)速的調(diào)節(jié),在速度控制器精確控制轉(zhuǎn)速的條件下,應(yīng)盡量減小電流控制器的算法復雜度,以減輕實時控制系統(tǒng)中控制器實現(xiàn)的難度和保證控制的實時性。一般來講,調(diào)速系統(tǒng)的要求以動態(tài)穩(wěn)定性和穩(wěn)態(tài)精度為主,對快速性的要求可以差些,主要采用PI控制器;在隨動系統(tǒng)中快速性則是主要的性能要求,必須用PD或是PID控制器。基于以上降低算法復雜度以及控制目標特性的兩點考慮,電流控制器采用了傳統(tǒng)的PI控制器。PI電流控制器可以使系統(tǒng)穩(wěn)定,并有足夠的穩(wěn)定裕度可滿足穩(wěn)態(tài)性能指標,表現(xiàn)出電流無穩(wěn)態(tài)誤差的特性。
控制系統(tǒng)設(shè)置轉(zhuǎn)速和電流兩個控制器,控制器實行串級連接。控制過程為:用設(shè)定的速度值和由轉(zhuǎn)子位置傳感器檢測的信號計算得到的電機實際速度值比較,經(jīng)過速度控制器的調(diào)節(jié),輸出電流給定值。檢測到的電流實際值與電流給定比較,經(jīng)過電流控制器,輸出得到供給電機的電壓。采用這種轉(zhuǎn)速、電流雙閉環(huán)控制方式,能夠恰當?shù)陌l(fā)揮電流截止負反饋和轉(zhuǎn)速負反饋的作用。從靜態(tài)特性上看,單獨的電流負反饋有使靜態(tài)特性變軟的趨勢,但是有轉(zhuǎn)速負反饋在外環(huán),當速度控制器不飽和時(如穩(wěn)態(tài)運行時),靜態(tài)特性上可能由電流負反饋產(chǎn)生的速度降落,完全被轉(zhuǎn)速控制器的作用消除。
又由于轉(zhuǎn)速控制器采用具有多模態(tài)控制結(jié)構(gòu)的基于特征模型的仿人智能控制,整個系統(tǒng)將是一個無穩(wěn)態(tài)誤差的調(diào)速系統(tǒng)。從動態(tài)響應(yīng)過程來看,突加設(shè)定轉(zhuǎn)速或啟動過程中,轉(zhuǎn)速控制器很快就達到飽和,只剩下電流環(huán)起作用,系統(tǒng)在最大電流受限的條件下,在大轉(zhuǎn)速偏差下實現(xiàn)最短時間控制策略,使轉(zhuǎn)速漸漸穩(wěn)定下來。速度、電流雙閉環(huán)控制系統(tǒng),在突加給定的暫態(tài)過程中表現(xiàn)為一個恒電流調(diào)節(jié)系統(tǒng),在穩(wěn)態(tài)時又表現(xiàn)為無穩(wěn)態(tài)誤差的調(diào)速系統(tǒng),控制系統(tǒng)從而具有很好的動、靜態(tài)品質(zhì)。
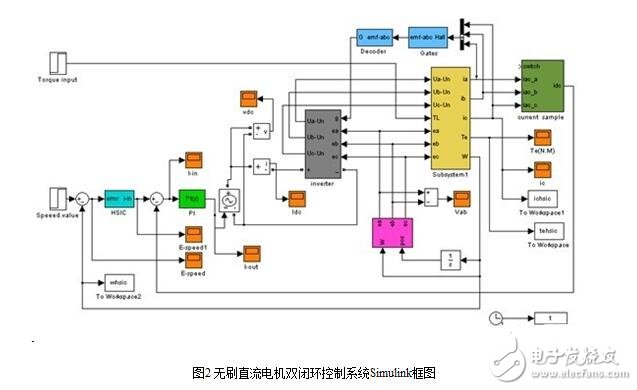
圖2為Matlab的Simulink環(huán)境下建模的整體控制框圖,主要包括:無刷直流電機本體模塊、仿人智能速度控制器模塊、PI 電流控制器模塊、換相邏輯模塊、電壓逆變器模塊、電流采樣模塊等。仿人智能速度控制器采用 Matlab的S函數(shù)實現(xiàn),成功實現(xiàn)了本文所設(shè)計的仿人智能控制器的多控制器、多模態(tài)的結(jié)構(gòu)。
為了驗證系統(tǒng)的性能,我們進行了以下兩個仿真實驗:
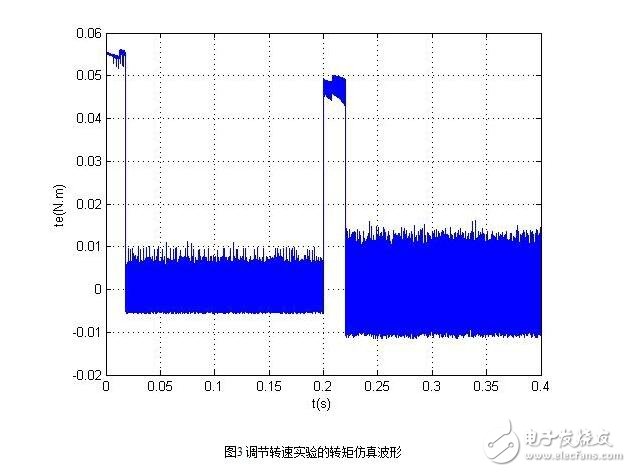
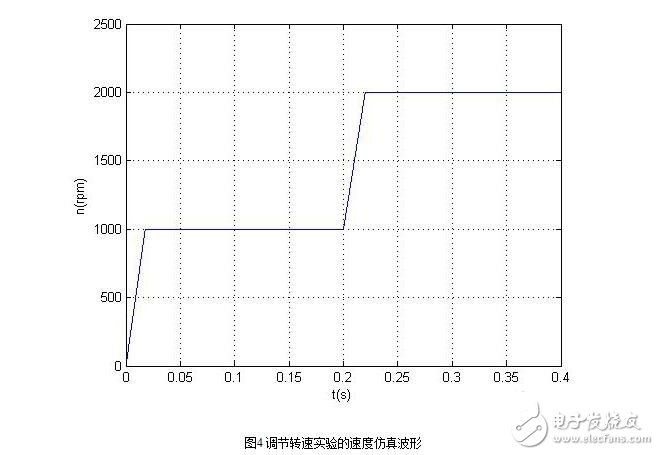
1. 調(diào)節(jié)轉(zhuǎn)速實驗
首先系統(tǒng)空載起動,設(shè)定轉(zhuǎn)速到1000rpm,等達到穩(wěn)定狀態(tài)后,在0.2s 時調(diào)節(jié)轉(zhuǎn)速到2000rpm。仿真實驗所得到的轉(zhuǎn)矩波形和轉(zhuǎn)速響應(yīng)的仿真曲線如圖3-4所示。
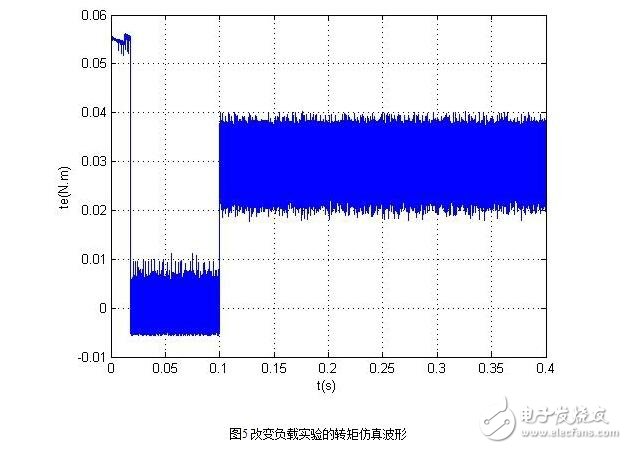
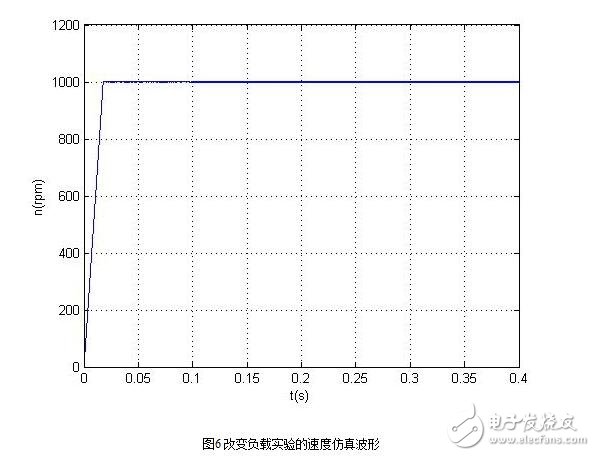
2. 變換負載實驗
系統(tǒng)空載起動,設(shè)定轉(zhuǎn)速到 1000rpm,待進入穩(wěn)態(tài)狀態(tài)后,在 0.1s 時加入負載 TL=0.03Nm。實驗得到的轉(zhuǎn)矩波形和轉(zhuǎn)速響應(yīng)曲線的仿真曲線如圖 5-6 所示。
在空載運行時,相電流達到最大值,達到最大啟動轉(zhuǎn)矩,在較短時間內(nèi)進入穩(wěn)態(tài),反電動勢波形其平頂部分約為 120度較為理想,系統(tǒng)上升時間tr較短,超調(diào)量 小系統(tǒng)穩(wěn)定性好,調(diào)節(jié)時間 ts也很短。穩(wěn)態(tài)運行時轉(zhuǎn)速無穩(wěn)態(tài)誤差,與理論分析相吻合。在 0.1s 時加入負載TL =0.03Nm,這時相電流增大以提高電磁轉(zhuǎn)矩,拖動外界負載,同時反電動勢幅值由于電流增大而略微增大。
結(jié)論與小結(jié)
1. 設(shè)計了無刷直流電機的仿人智能控制算法,并基于MATLAB平臺建立了無刷直流電機的仿真控制系統(tǒng)。
2. 通過對轉(zhuǎn)速調(diào)節(jié)仿真實驗,可以看到所設(shè)計的無刷直流電機仿人智能雙閉環(huán)控制系統(tǒng)具有良好的動、靜態(tài)特性。通過對變換負載仿真實驗中的相電流、相反電動勢、轉(zhuǎn)矩波形和轉(zhuǎn)速響應(yīng)的曲線的研究,可知,所設(shè)計的無刷直流電機仿人智能雙閉環(huán)控制系統(tǒng)能夠充分抑制外部的擾動。
3. 仿真結(jié)果表明了本文所設(shè)計的無刷直流電機仿人智能控制系統(tǒng)響應(yīng)速度快、抗干擾能力強,具有較強的實用價值。
?
推薦課程:
張飛軟硬開源,基于STM32?BLDC直流無刷電機驅(qū)動器視頻套件
http://t.elecfans.com/topic/42.html?elecfans_trackid=fsy_post










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論