 電子發燒友App
電子發燒友App


變頻電機是指在標準環境條件下,以100%額定負載在10%~100%額定速度范圍內連續運行,溫升不會超過該電機標定容許值的電機。
隨著電力電子技術及新型半導體器件的迅速發展 ,交流調速技術得到不斷的完善和提高 ,逐步完善的變頻器以其良好的輸出波形、優異的性能價格比在交流電機上得到廣泛應用。 例如: 鋼廠用于軋鋼的大型電動機和中、小型輥道電動機、鐵路及城市軌道交通用牽引電機、電梯電機、集裝箱起吊設備用起重電機、水泵和風機用電機、壓縮機、家用電器用電機等都相繼使用交流變頻調速電機 ,并取得了良好效果。采用交流變頻調速電機比直流調速電機具有顯著的優點:
( 1)調速容易 ,而且節能。
( 2)交流電機結構簡單、體積小、慣量小、造價低、維修容易、耐用。
( 3)可以擴大容量 ,實現高轉速和高電壓運行。
( 4)可以實現軟啟動和快速制動。
( 5)無火花、防爆、環境適應能力強。[1]
近年來 ,國際上變頻調速傳動裝置以每年 13 %~ 16% 的增長率發展 ,并有逐步取代大部分直流調速傳動裝置的趨勢。 由于以恒頻、恒壓電源進行工作的普通異步電機應用于變頻調速系統時 ,存在著很大的局限性 ,國外發展了根據使用場合和使用要求而設計的專用的變頻交流電動機。例如 ,有低噪音、低振動用的電機 ,有提高低速轉矩特性的電機 ,有高速電機 ,有帶測速發電機的電機以及矢量控制電機等。
變頻電機控制系統的組成和控制原理
異步電動機用變頻器傳動時的框圖如下圖所示,整流器將交流電變為直流電,平波回路將直流電平衡,逆變器將直流電逆變為頻率可調的交流電。為了電動機的調速傳動所給出的操作量有電壓、電流、頻率。
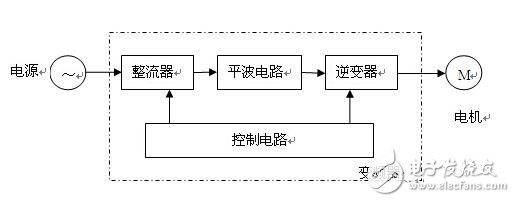
主電路方式分為電壓型及電流型兩類,控制方式也分為電壓控制及電流控制兩種。這兩種方式,不管主電路方式是電壓型還是電流型都可以適用。
通用變頻器等采用電壓控制方式,與輸出頻率成比例地控制輸出電壓。對于需要快速響應的用途則必須控制輸出電流,可采用電流控制方式。
1、電壓控制 通用變頻器適用電壓型的電壓控制。逆變器控制輸出的電壓和頻率。輸出電壓的大小,可以利用半導體開關的導通率將輸出電壓控制成為正弦波。晶閘管變頻器在整流器側控制輸出電壓,在逆變器側控制頻率。
2、電流控制 對于要求類似直流電動機快速響應性的應用場合,為了快速控制異步電動機的轉矩,適用電流控制。
變頻器控制面板結構如下,面板右側為與變頻電機面板的接口,包含變頻電機的驅動接口,左側為與運動控制器的接口,包含速度控制信號與正反轉控制接口等。
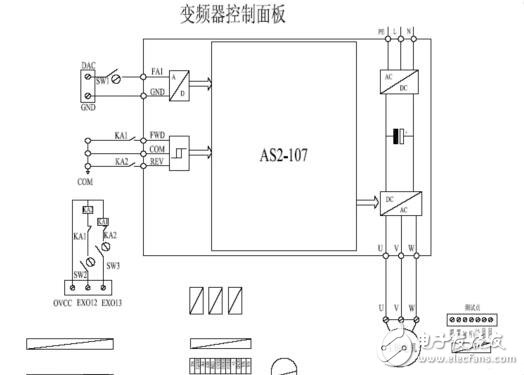
U,V,W信號為電機的電源線,用于驅動變頻電機的運動。
DAC,GND,OVCC,EX012,EX013為控制信號,其含義為:
DAC為驅動器接受的模擬控制信號,范圍一般為-10V-10V,對應電機的最低轉速和最高轉速。
GND為接地信號。EX012,EX013分別為電機的正轉和反轉信號。
變頻電機轉動慣量測量方法
轉動慣量是指剛體繞軸轉動時慣性(回轉物體保持其勻速圓周運動或靜止的特性)的量度,是衡量電機響應能力和靈活性的指標之一。其量值取決于物體的形狀、質量分布及轉軸的位置。可說是一個物體對于旋轉運動的慣性。轉動慣量在旋轉動力學中的角色相當于線性動力學中的質量,描述角動量、角速度、力矩和角加速度等數個量之間的關系。
變頻電機轉動慣量測定包括懸掛轉子擺動法、空載減速法、輔助擺錘法,本文根據相關電機試驗標準介紹變頻電機這三種轉動慣量測試方法的測試內容。
懸掛轉子擺動法測定轉動慣量
1.單鋼絲法測定轉動慣量
采用單鋼絲扭轉擺動比較法測定電機轉子的轉動慣量。
選擇密度均勻的金屬制成假轉子,假轉子形狀應為簡單的圓柱體,以便能用式(1)較精確計算出假轉子的轉動慣量。假轉子的質量應能將所選用的鋼絲拉直且鋼絲不變形。把假轉子可靠地懸掛在長度l≥0.5m的鋼絲一端,鋼絲的另一端固定在支架上,鋼絲軸線應與假轉子軸線同心且垂直地面。
將假轉子繞心軸扭轉一個適當的角度,仔細測量往復擺動次數N及所需時間t(s),求得擺動周期平均值T’(T’=N/t)。被試電機轉子在相同的條件下,重復上述試驗,按上方法求得其擺動周期的平均值T,按式(2)計算被試電機的轉動慣量J。
假轉子的轉動慣量J’(kg*㎡)由式(1)計算:
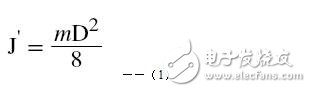
式中:
m——直徑D部分的圓柱體質量,單位為千克(kg);
D——圓柱體直徑,單位為米(m)。
被試電機轉子的轉動慣量J(kg*㎡)按式(2)計算:
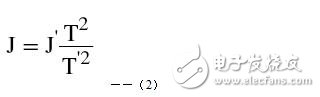
式中:
T——被試電機轉子的擺動周期平均值,單位為秒(s);
T’——假轉子的擺動周期平均值,單位為秒(s)。
2.雙鋼絲法測定轉動慣量
用兩根平行的鋼絲將被試電機轉子懸掛起來,使其轉軸中心線與地面垂直。扭轉轉子使其產生以軸線為中心的擺動。距轉軸中心線的扭角應不大于10°。仔細測取若干次擺動所需的時間,求出擺動周期的平均值T。轉動慣量J(kg*㎡)按式(3)求取:
式中:
l——鋼絲的長度,單位為米(m);
m——被試電機轉子的質量,單位為千克(kg);
g——重力加速度,單位為米每二次方秒(m/2^s);
a——兩鋼絲之間的距離,單位為米(m)。
空載減速法測定轉動慣量
此法用于測定功率為100kW以上上機的轉動慣量。
試驗時,使被試電機的轉速升高并超過同步轉速,然后,切斷電源或脫開驅動機械,在1.1倍~0.9倍同步轉速范圍內,測定轉速變化n(r/nin)所需的時間t(s)。轉動慣量J(kg*㎡)按式(4)計算:
輔助擺錘法測定轉動慣量
此法用于測定具有滾動軸承電機的轉動慣量。
將一個質量已知的輔助擺錘用質量盡可能小的臂桿固定于被試電機轉軸端面中心上,擺錘臂桿應與軸線成直角。當轉軸上帶有皮帶輪或半個聯軸器時,也可用它們固定擺錘。
試驗時,擺錘的初始位置與靜止位置的偏移應不大于15°,在開始擺動后,測量2~3次擺動所需的時間,求出擺動周期的平均值。以擺錘通過靜止位置的瞬間作為測量擺動周期的起始點。轉動慣量J(kg*㎡)按式(5)計算:
式中:
m——輔助擺錘的質量,單位為千克(kg);
r——輔助擺錘的重心到轉軸中心線的距離,單位為米(m);
T——輔助擺錘擺動周期的平均值,單位為秒(s)。
對功率為10kw~1000kW的電機,選用輔助擺錘時,應使擺動周期3s~8s。為了校核,建議在擺錘質量略有不同的情況下重復進行測定。













 工商網監
工商網監
評論