 電子發燒友App
電子發燒友App


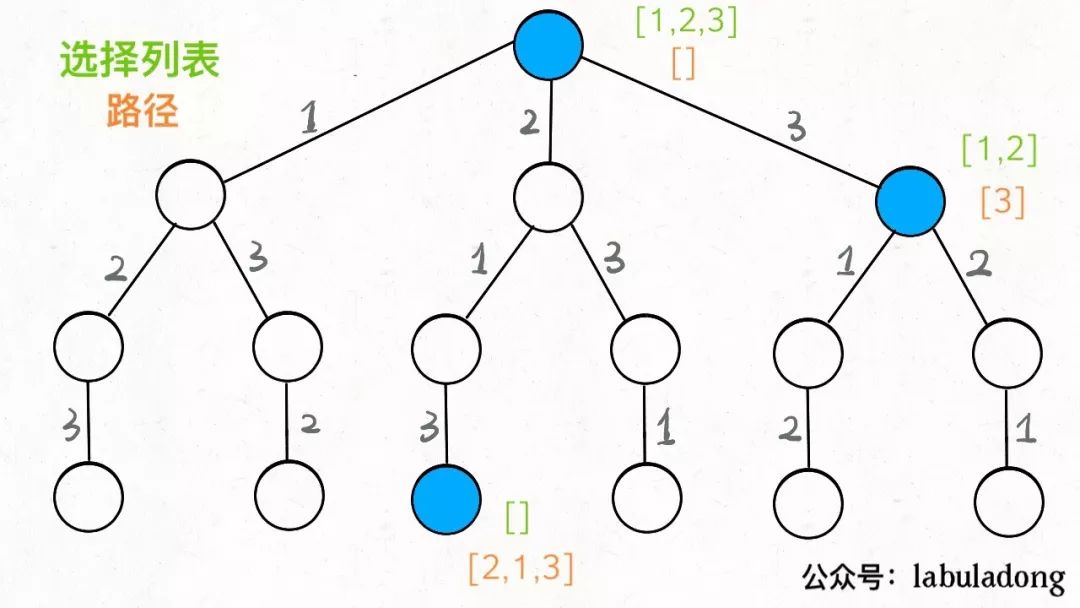
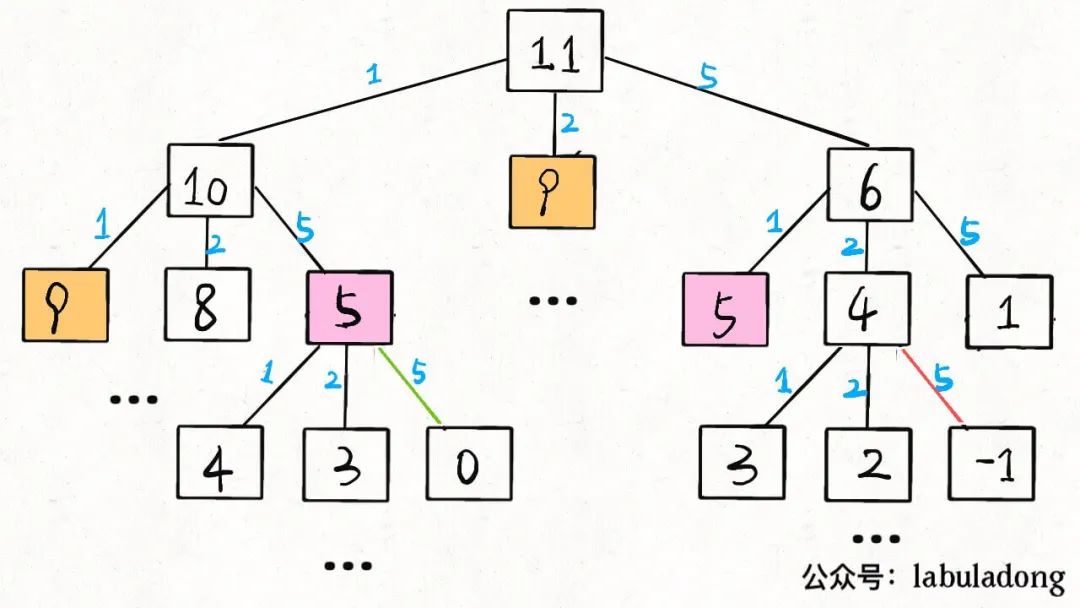
5)分治法的復雜性分析
一個分治法將規模為n的問題分成k個規模為n/m的子問題去解。設分解閥值n0=1,且adhoc解規模為1的問題耗費1個單位時間。再設將原問題分解為k個子問題以及用merge將k個子問題的解合并為原問題的解需用f(n)個單位時間。用T(n)表示該分治法解規模為|P|=n的問題所需的計算時間,則有:
T(n)= k T(n/m)+f(n)
通過迭代法求得方程的解:
遞歸方程及其解只給出n等于m的方冪時T(n)的值,但是如果認為T(n)足夠平滑,那么由n等于m的方冪時T(n)的值可以估計T(n)的增長速度。通常假定T(n)是單調上升的,從而當 mi≤n《mi+1時,T(mi)≤T(n)《T(mi+1)。
2、動態規劃算法
1)基本概念
動態規劃過程是:每次決策依賴于當前狀態,又隨即引起狀態的轉移。一個決策序列就是在變化的狀態中產生出來的,所以,這種多階段最優化決策解決問題的過程就稱為動態規劃。
2)基本思想與策略
基本思想與分治法類似,也是將待求解的問題分解為若干個子問題(階段),按順序求解子階段,前一子問題的解,為后一子問題的求解提供了有用的信息。在求解任一子問題時,列出各種可能的局部解,通過決策保留那些有可能達到最優的局部解,丟棄其他局部解。依次解決各子問題,最后一個子問題就是初始問題的解。
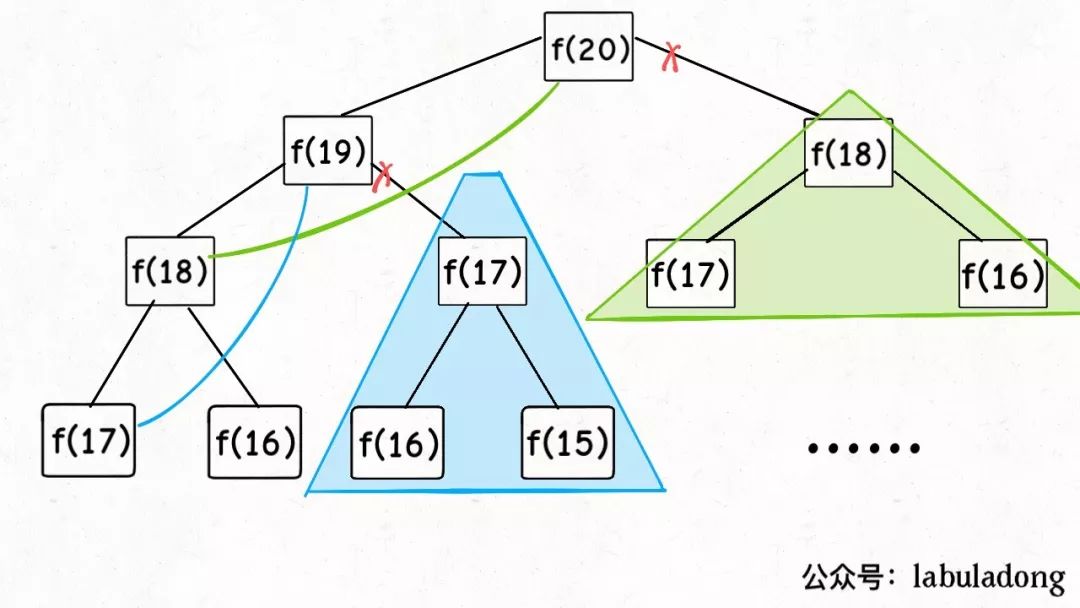
由于動態規劃解決的問題多數有重疊子問題這個特點,為減少重復計算,對每一個子問題只解一次,將其不同階段的不同狀態保存在一個二維數組中。
與分治法最大的差別是:適合于用動態規劃法求解的問題,經分解后得到的子問題往往不是互相獨立的(即下一個子階段的求解是建立在上一個子階段的解的基礎上,進行進一步的求解)。
3)適用的情況
能采用動態規劃求解的問題的一般要具有3個性質:
(1) 最優化原理:如果問題的最優解所包含的子問題的解也是最優的,就稱該問題具有最優子結構,即滿足最優化原理。
(2) 無后效性:即某階段狀態一旦確定,就不受這個狀態以后決策的影響。也就是說,某狀態以后的過程不會影響以前的狀態,只與當前狀態有關。
(3)有重疊子問題:即子問題之間是不獨立的,一個子問題在下一階段決策中可能被多次使用到。(該性質并不是動態規劃適用的必要條件,但是如果沒有這條性質,動態規劃算法同其他算法相比就不具備優勢)
4)求解的基本步驟
動態規劃所處理的問題是一個多階段決策問題,一般由初始狀態開始,通過對中間階段決策的選擇,達到結束狀態。這些決策形成了一個決策序列,同時確定了完成整個過程的一條活動路線(通常是求最優的活動路線)。如圖所示。動態規劃的設計都有著一定的模式,一般要經歷以下幾個步驟。
初始狀態→│決策1│→│決策2│→…→│決策n│→結束狀態
圖1 動態規劃決策過程示意圖
(1)劃分階段:按照問題的時間或空間特征,把問題分為若干個階段。在劃分階段時,注意劃分后的階段一定要是有序的或者是可排序的,否則問題就無法求解。
(2)確定狀態和狀態變量:將問題發展到各個階段時所處于的各種客觀情況用不同的狀態表示出來。當然,狀態的選擇要滿足無后效性。
(3)確定決策并寫出狀態轉移方程:因為決策和狀態轉移有著天然的聯系,狀態轉移就是根據上一階段的狀態和決策來導出本階段的狀態。所以如果確定了決策,狀態轉移方程也就可寫出。但事實上常常是反過來做,根據相鄰兩個階段的狀態之間的關系來確定決策方法和狀態轉移方程。
(4)尋找邊界條件:給出的狀態轉移方程是一個遞推式,需要一個遞推的終止條件或邊界條件。
一般,只要解決問題的階段、狀態和狀態轉移決策確定了,就可以寫出狀態轉移方程(包括邊界條件)。
實際應用中可以按以下幾個簡化的步驟進行設計:
(1)分析最優解的性質,并刻畫其結構特征。
(2)遞歸的定義最優解。
(3)以自底向上或自頂向下的記憶化方式(備忘錄法)計算出最優值
(4)根據計算最優值時得到的信息,構造問題的最優解
5)算法實現的說明
動態規劃的主要難點在于理論上的設計,也就是上面4個步驟的確定,一旦設計完成,實現部分就會非常簡單。
使用動態規劃求解問題,最重要的就是確定動態規劃三要素:
(1)問題的階段 (2)每個階段的狀態
(3)從前一個階段轉化到后一個階段之間的遞推關系。
遞推關系必須是從次小的問題開始到較大的問題之間的轉化,從這個角度來說,動態規劃往往可以用遞歸程序來實現,不過因為遞推可以充分利用前面保存的子問題的解來減少重復計算,所以對于大規模問題來說,有遞歸不可比擬的優勢,這也是動態規劃算法的核心之處。
確定了動態規劃的這三要素,整個求解過程就可以用一個最優決策表來描述,最優決策表是一個二維表,其中行表示決策的階段,列表示問題狀態,表格需要填寫的數據一般對應此問題的在某個階段某個狀態下的最優值(如最短路徑,最長公共子序列,最大價值等),填表的過程就是根據遞推關系,從1行1列開始,以行或者列優先的順序,依次填寫表格,最后根據整個表格的數據通過簡單的取舍或者運算求得問題的最優解。
f(n,m)=max{f(n-1,m), f(n-1,m-w[n])+P(n,m)}
6)動態規劃算法基本框架
代碼
1 for(j=1; j《=m; j=j+1) // 第一個階段
2 xn[j] = 初始值;
3
4 for(i=n-1; i》=1; i=i-1)// 其他n-1個階段
5 for(j=1; j》=f(i); j=j+1)//f(i)與i有關的表達式
6 xi[j]=j=max(或min){g(xi-1[j1:j2]), 。。。。。。, g(xi-1[jk:jk+1])};
8
9 t = g(x1[j1:j2]); // 由子問題的最優解求解整個問題的最優解的方案
10
11 print(x1[j1]);
12
13 for(i=2; i《=n-1; i=i+1)
15 {
17 t = t-xi-1[ji];
18
19 for(j=1; j》=f(i); j=j+1)
21 if(t=xi[ji])
23 break;
25 }
















 工商網監
工商網監
評論