 電子發燒友App
電子發燒友App


交叉編譯的概念在第4章中已經詳細講述過,搭建交叉編譯環境是嵌入式開發的第一步,也是必備的一步。搭建交叉編譯環境的方法很多,不同的體系結構、不同的操作內容甚至是不同版本的內核,都會用到不同的交叉編譯器,而且,有些交叉編譯器經常會有部分的bug,這都會導致最后的代碼無法正常地運行。因此,選擇合適的交叉編譯器對于嵌入式開發是非常重要的。
交叉編譯器完整的安裝一般涉及多個軟件的安裝(讀者可以從ftp://gcc.gnu.org/pub/下載),包括binutils、gcc、glibc等軟件。其中,binutils主要用于生成一些輔助工具,如objdump、as、ld等;gcc是用來生成交叉編譯器的,主要生成arm-linux-gcc交叉編譯工具(應該說,生成此工具后已經搭建起了交叉編譯環境,可以編譯Linux內核了,但由于沒有提供標準用戶函數庫,用戶程序還無法編譯);glibc主要是提供用戶程序所使用的一些基本的函數庫。這樣,交叉編譯環境就完全搭建起來了。
上面所述的搭建交叉編譯環境比較復雜,很多步驟都涉及對硬件平臺的選擇。因此,現在嵌入式平臺提供廠商一般會提供在該平臺上測試通過的交叉編譯器,而且很多公司把以上安裝步驟全部寫入腳本文件或者以發行包的形式提供,這樣就大大方便了用戶的使用。如優龍的FS2410開發光盤里就附帶了2.95.3和3.3.2兩個版本的交叉編譯器,其中前一個版本是用于編譯Linux?2.4內核的,而后一個版本是用于編譯Linux?2.6版本內核的。由于這是廠商測試通過的編譯器,因此可靠性會比較高,而且與開發板能夠很好地吻合。所以推薦初學者直接使用廠商提供的編譯器。當然,由于時間滯后的原因,這個編譯器往往不是最新的版本,若需要更新時希望讀者另外查找相關資料學習。本書就以優龍自帶的cross-3.3.2為例進行講解(具體的名稱不同廠商可能會有區別)。
安裝交叉編譯器的具體步驟在第2章的實驗二中已經進行了詳細地講解了,在此僅回憶關鍵步驟,對于細節請讀者參見第2章的實驗二。
在/usr/local/arm下解壓cross-3.3.2.bar.bz2。
[root@localhost?arm]#?tar?–jxvf?cross-3.3.2.bar.bz2
[root@localhost?arm]#?ls
3.3.2??cross-3.3.2.tar.bz2
[root@localhost?arm]#?cd?./3.3.2
[root@localhost?arm]#?ls
arm-linux??bin??etc??include??info??lib??libexec??man??sbin??share??VERSIONS
[root@localhost?bin]#?which?arm-linux*
/usr/local/arm/3.3.2/bin/arm-linux-addr2line
/usr/local/arm/3.3.2/bin/arm-linux-ar
/usr/local/arm/3.3.2/bin/arm-linux-as
/usr/local/arm/3.3.2/bin/arm-linux-c++
/usr/local/arm/3.3.2/bin/arm-linux-c++filt
/usr/local/arm/3.3.2/bin/arm-linux-cpp
/usr/local/arm/3.3.2/bin/arm-linux-g++
/usr/local/arm/3.3.2/bin/arm-linux-gcc
/usr/local/arm/3.3.2/bin/arm-linux-gcc-3.3.2
/usr/local/arm/3.3.2/bin/arm-linux-gccbug
/usr/local/arm/3.3.2/bin/arm-linux-gcov
/usr/local/arm/3.3.2/bin/arm-linux-ld
/usr/local/arm/3.3.2/bin/arm-linux-nm
/usr/local/arm/3.3.2/bin/arm-linux-objcopy
/usr/local/arm/3.3.2/bin/arm-linux-objdump
/usr/local/arm/3.3.2/bin/arm-linux-ranlib
/usr/local/arm/3.3.2/bin/arm-linux-readelf
/usr/local/arm/3.3.2/bin/arm-linux-size
/usr/local/arm/3.3.2/bin/arm-linux-strings
/usr/local/arm/3.3.2/bin/arm-linux-strip
可以看到,在/usr/local/arm/3.3.2/bin/下已經安裝了很多交叉編譯工具。用戶可以查看arm文件夾下的VERSIONS文件,顯示如下:
Versions
gcc-3.3.2
glibc-2.3.2
binutils-head
Tool?chain?binutils?configuration:
../binutils-head/configure?…
Tool?chain?glibc?configuration:
../glibc-2.3.2/configure?…
Tool?chain?gcc?configuration
../gcc-3.3.2/configure?…
可以看到,這個交叉編譯工具確實集成了binutils、gcc、glibc這幾個軟件,而每個軟件也都有比較復雜的配置信息,讀者可以查看VERSIONS文件了解相關信息。
5.1.2??超級終端和minicom配置及使用
前文已知,嵌入式系統開發的程序只能在對應的嵌入式硬件平臺上運行,那么如何把開發板上的信息顯示給開發人員呢?最常用的就是通過串口線輸出到宿主機的顯示器上,這樣,開發人員就可以看到系統的運行情況了。在Windows和Linux中都有不少串口通信軟件,可以很方便地對串口進行配置,其中最主要的配置參數是波特率、數據位、停止位、奇偶校驗位和數據流控制位等,但是它們一定要根據實際情況進行相應配置。下面介紹Windows中典型的串口通信軟件“超級終端”和在Linux下的“minicom”。
1.超級終端
首先,打開Windows下的“開始”→“附件”→“通訊”→“超級終端”,這時會出現如圖5.1所示的新建超級終端界面,在“名稱”處可隨意輸入該連接的名稱。
圖5.1??新建超級終端界面
接下來,將“連接時使用”的方式改為“COM1”,即通過串口1,如圖5.2所示。
接下來就到了最關鍵的一步——設置串口連接參數。要注意,每塊開發板的連接參數有可能會有差異,其中的具體數據在開發商提供的用戶手冊中會有說明。如優龍的這款FS2410采用的是波特率為115200,數據位數為8,無奇偶校驗位,停止位數為1,無硬件流控,其對應配置如圖5.3所示。
 ???????????????
???????????????
圖5.2??選擇連接時使用方式???????? 圖5.3??配置串口相關參數
這樣,就基本完成了配置,最后一步單擊“確定”按鈕就可以了。這時,讀者可以把開發板的串口線和PC機相連,若配置正確,在開發板上電后,在超級終端的窗口里應能顯示類似于圖5.4的串口信息。
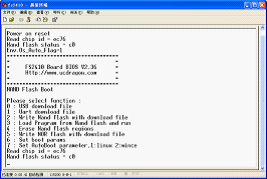
圖5.4??在超級終端上顯示信息
 注意
注意
要分清開發板上的串口1、串口2,如在優龍的開發板上標有“UART1”、“UATR2”,否則串口無法打印出信息。
2.minicom
minicom是Linux下串口通信的軟件,它的使用完全依靠鍵盤的操作,雖然沒有“超級終端”那么易用,但是使用習慣之后讀者將會體會到它的高效與便利。下面主要講解如何對minicom進行串口參數的配置。
首先在命令行中鍵入“minicom”,這就啟動了minicom軟件。minicom在啟動時默認會進行初始化配置,如圖5.5所示。可以通過“minicom?-s”命令進行minicom的配置。
圖5.5??minicom啟動
 注意
注意
在minicom的使用中,經常會遇到3個鍵的操作,如“CTRL-A?Z”,這表示先同時按下CTRL和“A”,然后松開這兩個鍵再按下“Z”。
正如圖5.5中的提示,接下來可鍵入CTRL-A?Z,來查看minicom的幫助,如圖5.6所示。按照幫助所示,可鍵入“O”(代表Configure?minicom)來配置minicom的串口參數,當然也可以直接鍵入“CTRL-A?O”來進行配置。如圖5.7所示。
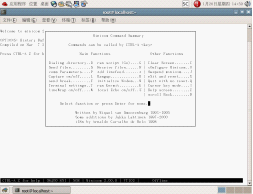
圖5.6??minicom幫助
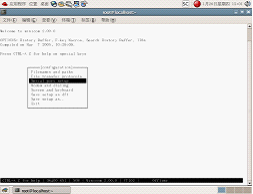
圖5.7??minicom配置界面
在這個配置框中選擇“Serial?port?setup”子項,進入如圖5.8所示的配置界面。
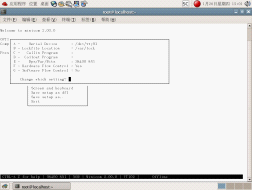
圖5.8??minicom串口屬性配置界面
上面列出的配置是minicom啟動時的默認配置,用戶可以通過鍵入每一項前的大寫字母,分別對每一項進行更改。圖5.9所示為在“Change?which?setting”?中鍵入了“A”,此時光標轉移到第A項的對應處。
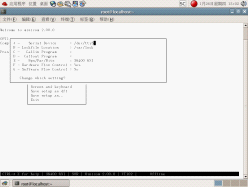
圖5.9??minicom串口號配置
 注意
注意
在minicom中“ttyS0”對應“COM1”,“ttyS1”對應“COM2”。
接下來,要對波特率、數據位和停止位進行配置,鍵入“E”,進入如圖5.10所示的配置界面。
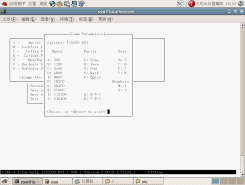
圖5.10??minicom波特率等配置界面
在該配置界面中,可以鍵入相應波特率、停止位等對應的字母,即可實現配置,配置完成后按回車鍵就退出了該配置界面,在上層界面中顯示如圖5.11所示配置信息,要注意與圖5.8進行對比,確定相應參數是否已被重新配置。
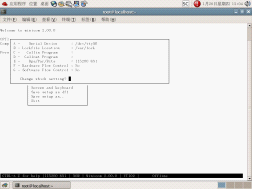
圖5.11??minicom配置完成后界面
在確認配置正確后,可鍵入回車返回上級配置界面,并將其保存為默認配置,如圖5.12所示。之后,可重新啟動minicom使剛才配置生效,在用串口線將宿主機和開發板連接之后,就可在minicom中打印出正確的串口信息,如圖5.13所示。

圖5.12??minicom保存配置信息
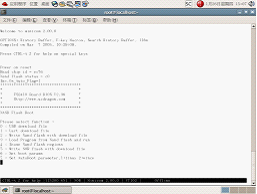
圖5.13??minicom顯示串口信息
到此為止,讀者已經能將開發板的系統情況通過串口打印到宿主機上了,這樣,就能很好地了解硬件的運行狀況。
 小知識
小知識
通過串口打印信息是一個很常見的手段,很多其他情況如路由器等也是通過配置串口的波特率這些參數來顯示對應信息的。
5.1.3??下載映像到開發板
正如第4章中所述,嵌入式開發的運行環境是目標板,而開發環境是宿主機。因此,需要把宿主機中經過編譯之后的可執行文件下載到目標板上。要注意的是,這里所說的下載是下載到目標機中的SDRAM。然后,用戶可以選擇直接從SDRAM中運行或寫入到Flash中再運行。運行常見的下載方式有網絡下載(如tftp、ftp等方式)、串口下載、USB下載等,本書主要講解網絡下載中的tftp方式和串口下載方式。
1.tftp
tftp是簡單文件傳輸協議,它可以看作是一個FTP協議的簡化版本,與FTP協議相比,它的最大區別在于沒有用戶管理的功能。它的傳輸速度快,可以通過防火墻,使用方便快捷,因此在嵌入式的文件傳輸中廣泛使用。
同FTP一樣,tftp分為客戶端和服務器端兩種。通常,首先在宿主機上開啟tftp服務器端服務,設置好tftp的根目錄內容(也就是供客戶端訪問的根目錄),接著,在目標板上開啟tftp的客戶端程序(現在很多Bootloader幾乎都提供該服務)。這樣,把目標板和宿主機用直連線相連之后,就可以通過tftp協議傳輸可執行文件了。
下面分別講述在Linux下和Windows下的配置方法。
(1)Linux下tftp服務配置。
Linux下tftp的服務器服務是由xinetd所設定的,默認情況下是處于關閉狀態。
首先,要修改tftp的配置文件,開啟tftp服務,如下所示:
[root@localhost?tftpboot]#?vim?/etc/xinetd.d/tftp
#?default:?off
#?description:?The?tftp?server?serves?files?using?the?trivial?file?transfer
#????????????protocol.??The?tftp?protocol?is?often?used?to?boot?diskless?
#????????????workstations,?download?configuration?files?to?network-aware?printers,
#????????????and?to?start?the?installation?process?for?some?operating?systems.
service?tftp
{
socket_type??????????????????=?dgram??/*?使用數據報套接字*/
protocol????????????????????=?udp????/*?使用UDP協議?*/
wait??????????????????????????=?yes????/*?允許等待?*/
user??????????????????????????=?root???/*?用戶?*/
server????????????????????????=?/usr/sbin/in.tftpd?/*?服務程序*/
server_args??????????????????=?-s?/tftpboot?/*?服務器端的根目錄*/
disable???????????????????????=?no?????????????/*?使能?*/
per_source???????????????????=?11
cps???????????????????????????=?100?2
flags?????????????????????????=?IPv4
}
在這里,主要要將“disable=yes”改為“no”,另外,從“server_args”可以看出,tftp服務器端的默認根目錄為“/tftpboot”,用戶如果需要則可以更改為其他目錄。
接下來,重啟xinetd服務,使剛才的更改生效,如下所示:
[root@localhost?tftpboot]#?service?xinetd?restart
(或者使用/etc/init.d/xinetd?restart,而且因發行版的不同具體路徑會有所不同)
關閉?xinetd:?????????????????????????????????????????????[??確定??]
啟動?xinetd:?????????????????????????????????????????????[??確定??]
接著,使用命令“netstat?-au”以確認tftp服務是否已經開啟,如下所示:
[root@localhost?tftpboot]#?netstat?–au?|?grep?tftp
Active?Internet?connections?(servers?and?established)
Proto?Recv-Q?Send-Q?Local?Address???????????????Foreign?Address???????State
udp????????0??????0?*:tftp?????????????????????????*:*
這時,用戶就可以把所需要的傳輸文件放到“/tftpboot”目錄下,這樣,主機上的tftp服務就可以建立起來了(注意:需要在服務端關閉防火墻)。
接下來,用直連線把目標板和宿主機連起來,并且將其配置成一個網段的地址(例如兩個IP都可以設置為192.168.1.XXX格式),再在目標板上啟動tftp客戶端程序(注意:不同的Bootloader所使用的命令可能會不同,例如:在RedBoot中使用load命令下載文件是基于tftp協議的。讀者可以查看幫助來獲得確切的命令名及格式),如下所示:
=>tftpboot?0x30200000?zImage
TFTP?from?server?192.168.1.1;?our?IP?address?is?192.168.1.100
Filename?'zImage'.
Load?address:?0x30200000
Loading:?#################################################################
###############################################################
#############################################
done
Bytes?transferred?=?881988?(d7544?hex)
可以看到,此處目標板使用的IP為“192.168.1.100”,宿主機使用的IP為“192.168.1.1”,下載到目標板的地址為0x30200000,文件名為“zImage”。
(2)Windows下tftp服務配置。
在Windows下配置tftp服務器端需要下載tftp服務器軟件,常見的為tftpd32。
首先,單擊tftpd32下方的設置按鈕,進入設置界面,如圖5.14所示,在這里,主要配置tftp服務器端地址,也就是宿主機的地址。
接下來,重新啟動tftpd32軟件使剛才的配置生效,這樣服務器端的配置就完成了,這時,就可以用直連線連接目標機和宿主機,且在目標機上開啟tftp服務進行文件傳輸,這時,tftp服務器端如圖5.15和圖5.16所示。
 ?????
????? ??????
??????
圖5.14??tftp文件傳輸???????圖5.15??tftpd32配置界面??????圖5.16??tftp服務器端顯示情況
 小知識
小知識
tftp是一個很好的文件傳輸協議,它的簡單易用吸引了廣大用戶。但它同時也存在著較大的安全隱患。由于tftp不需要用戶的身份認證,因此給了黑客的可乘之機。2003年8月12日爆發的全球沖擊波(Worm.Blaster)病毒就是模擬一個tftp服務器,并啟動一個攻擊傳播線程,不斷地隨機生成攻擊地址進行入侵。因此在使用tftp時一定要設置一個單獨的目錄作為tftp服務的根目錄,如上文所述的“/tftpboot”等。
2.串口下載
使用串口下載需要配合特定的下載軟件,如優龍公司提供的DNW軟件等,一般在Windows下進行操作。雖然串口下載的速度沒有網絡下載快,但由于它很方便,不需要額外的連線和設置IP等操作,因此也廣受用戶的青睞。下面就以DNW軟件為例,介紹串口下載的方式。
與其他串口通信的軟件一樣,在DNW中也要設置“波特率”、“端口號”等。打開“Configuration”下的“Options”界面,如圖5.17所示。
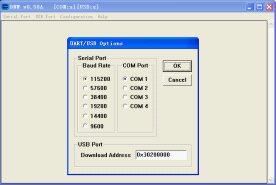
圖5.17??DNW配置界面
在配置完之后,單擊“Serial?Port”下的“Connect”,再將開發板上電,選擇“串口下載”,接著再在“Serial?Port”下選擇“Transmit”,這時,就可以進行文件傳輸了,如圖5.18和圖5.19所示。這里DNW默認串口下載的地址為0x30200000。

圖5.18??DNW串口下載圖
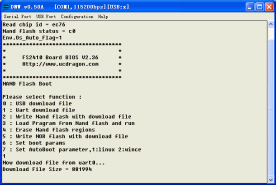
圖5.19??DNW串口下載情形圖
5.1.4??編譯嵌入式Linux內核
在做完了前期的準備工作之后,在這一步,讀者就可以編譯嵌入式Linux的內核了。在這里,本書主要介紹嵌入式Linux內核的編譯過程,在下一節會進一步介紹嵌入式Linux中體系結構相關的內核代碼,讀者在此之后就可以嘗試嵌入式Linux操作系統的移植。
編譯嵌入式Linux內核都是通過make的不同命令來實現的,它的執行配置文件就是在第3章中講述的makefile。Linux內核中不同的目錄結構里都有相應的makefile,而不同的makefile又通過彼此之間的依賴關系構成統一的整體,共同完成建立依賴關系、建立內核等功能。
內核的編譯根據不同的情況會有不同的步驟,但其中最主要分別為3個步驟:內核配置、建立依賴關系、創建內核映像,除此之外還有一些輔助功能,如清除文件和依賴關系等。讀者在實際編譯時若出現錯誤等情況,可以考慮采用其他輔助功能。下面分別講述這3步主要的步驟。
(1)內核配置。
第一步內核配置中的選項主要是用戶用來為目標板選擇處理器架構的選項,不同的處理器架構會有不同的處理器選項,比如ARM就有其專用的選項如“Multimedia?capabilities?port?drivers”等。因此,在此之前,必須確保在根目錄中makefile里“ARCH”的值已設定了目標板的類型,如:
ARCH????????:=?arm
接下來就可以進行內核配置了,內核支持4種不同的配置方法,這幾種方法只是與用戶交互的界面不同,其實現的功能是一樣的。每種方法都會通過讀入一個默認的配置文件—根目錄下“.config”隱藏文件(用戶也可以手動修改該文件,但不推薦使用)。當然,用戶也可以自己加載其他配置文件,也可以將當前的配置保存為其他名字的配置文件。這4種方式如下。
n make?config:基于文本的最為傳統的配置界面,不推薦使用。
n make?menuconfig:基于文本選單的配置界面,字符終端下推薦使用。
n make?xconfig:基于圖形窗口模式的配置界面,Xwindow下推薦使用。
n make?oldconfig:自動讀入“.config”配置文件,并且只要求用戶設定前次沒有設定過的選項。
在這4種模式中,make?menuconfig使用最為廣泛,下面就以make?menuconfig為例進行講解,如圖5.20所示。
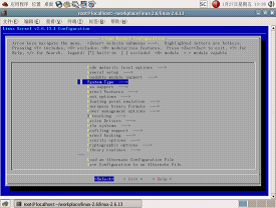
圖5.20??make?menuconfig配置界面
從該圖中可以看出,Linux內核允許用戶對其各類功能逐項配置,一共有18類配置選項,這里就不對這18類配置選項進行一一講解了,需要的時候讀者可以參見相關選項的help。在menuconfig的配置界面中是純鍵盤的操作,用戶可使用上下鍵和“Tab”鍵移動光標以進入相關子項,圖5.21所示為進入了“System?Type”子項的界面,該子項是一個重要的選項,主要用來選擇處理器的類型。
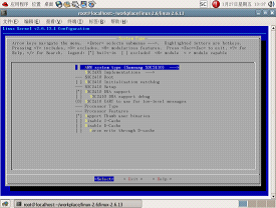
圖5.21??System?Type子項
可以看到,每個選項前都有個括號,可以通過按空格鍵或“Y”鍵表示包含該選項,按“N”表示不包含該選項。
另外,讀者可以注意到,這里的括號有3種,即中括號、尖括號或圓括號。讀者可以用空格鍵選擇相應的選項時可以發現中括號里要么是空,要么是“*”;尖括號里可以是空,“*”和“M”,分別表示包含選項、不包含選項和編譯成模塊;圓括號的內容是要求用戶在所提供的幾個選項中選擇一項。
此外,要注意2.4和2.6內核在串口命名上的一個重要區別,在2.4內核中“COM1”對應的是“ttyS0”,而在2.6內核中“COM1”對應“ttySAC0”,因此在啟動參數的子項要格外注意,如圖5.22所示,否則串口打印不出信息。
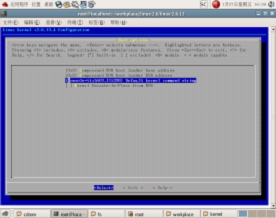
圖5.22??啟動參數配置子項
一般情況下,使用廠商提供的默認配置文件都能正常運行,所以用戶初次使用時可以不用對其進行額外的配置,在以后需要使用其他功能時再另行添加,這樣可以大大減少出錯的幾率,有利于錯誤定位。在完成配置之后,就可以保存退出,如圖5.23所示。
圖5.23??保存退出
(2)建立依賴關系。
由于內核源碼樹中的大多數文件都與一些頭文件有依賴關系,因此要順利建立內核,內核源碼樹中的每個Makefile都必須知道這些依賴關系。建立依賴關系通常在第一次編譯內核的時候(或者源碼目錄樹的結構發生變化的時候)進行,它會在內核源碼樹中每個子目錄產生一個“.depend”文件。運行“make?dep”即可。在編譯2.6版本的內核通常不需要這個過程,直接輸入“make”即可。
(3)建立內核
建立內核可以使用“make”、“make?zImage”或“make?bzImage”,這里建立的為壓縮的內核映像。通常在Linux中,內核映像分為壓縮的內核映像和未壓縮的內核映像。其中,壓縮的內核映像通常名為zImage,位于“arch/$(ARCH)/boot”目錄中。而未壓縮的內核映像通常名為vmlinux,位于源碼樹的根目錄中。
到這一步就完成了內核源代碼的編譯,之后,讀者可以使用上一小節所講述的方法把內核壓縮文件下載到開發板上運行。
 小知識
小知識
在嵌入式Linux的源碼樹中通常有以下幾個配置文件,“.config”、“autoconf.h”、“config.h”,其中“.config”文件是make?menuconfig默認的配置文件,位于源碼樹的根目錄中。“autoconf.h”和“config.h”是以宏的形式表示了內核的配置,當用戶使用make?menuconfig做了一定的更改之后,系統自動會在“autoconf.h”和“config.h”中做出相應的更改。它們位于源碼樹的“/include/linux/”下。
5.1.5??Linux內核源碼目錄結構
Linux內核源碼的目錄結構如圖5.24所示。

n /include子目錄包含了建立內核代碼時所需的大部分包含文件,這個模塊利用其他模塊重建內核。
n /init子目錄包含了內核的初始化代碼,這里的代碼是內核工作的起始入口。
n /arch子目錄包含了所有處理器體系結構特定的內核代碼。如:arm、i386、alpha。
n /drivers子目錄包含了內核中所有的設備驅動程序,如塊設備和SCSI設備。
n /fs子目錄包含了所有的文件系統的代碼,如:ext2、vfat等。
n /net子目錄包含了內核的網絡相關代碼。
n /mm子目錄包含了所有內存管理代碼。
n /ipc子目錄包含了進程間通信代碼。
n /kernel子目錄包含了內核核心代碼。
5.1.6??制作文件系統
讀者把上一節中所編譯的內核壓縮映像下載到開發板后會發現,系統在進行了一些初始化的工作之后,并不能正常啟動,如圖5.25所示。
可以看到,系統啟動時發生了加載文件系統的錯誤。要記住,上一節所編譯的僅僅是內核,文件系統和內核是完全獨立的兩個部分。讀者可以回憶一下第2章講解的Linux啟動過程的分析(嵌入式Linux是Linux裁減后的版本,其精髓部分是一樣的),其中在head.S中就加載了根文件系統。因此,加載根文件系統是Linux啟動中不可缺少的一部分。本節將講解嵌入式Linux中文件系統的制作方法。
圖5.25??系統啟動錯誤
制作文件系統的方法有很多,可以從零開始手工制作,也可以在現有的基礎上添加部分內容并加載到目標板上去。由于完全手工制作工作量比較大,而且也很容易出錯,因此,本節將主要介紹把現有的文件系統加載到目標板上的方法,主要包括制作文件系統映像和用NFS加載文件系統的方法。
1.制作文件系統映像
讀者已經知道,Linux支持多種文件系統,同樣,嵌入式Linux也支持多種文件系統。雖然在嵌入式系統中,由于資源受限的原因,它的文件系統和PC機Linux的文件系統有較大的區別,但是,它們的總體架構是一樣的,都是采用目錄樹的結構。在嵌入式系統中常見的文件系統有cramfs、romfs、jffs、yaffs等,這里就以制作cramfs文件系統為例進行講解。cramfs文件系統是一種經過壓縮的、極為簡單的只讀文件系統,因此非常適合嵌入式系統。要注意的是,不同的文件系統都有相應的制作工具,但是其主要的原理和制作方法是類似的。
在嵌入式Linux中,busybox是構造文件系統最常用的軟件工具包,它被非常形象地稱為嵌入式Linux系統中的“瑞士軍刀”,因為它將許多常用的Linux命令和工具結合到了一個單獨的可執行程序(busybox)中。雖然與相應的GNU工具比較起來,busybox所提供的功能和參數略少,但在比較小的系統(例如啟動盤)或者嵌入式系統中已經足夠了。busybox在設計上就充分考慮了硬件資源受限的特殊工作環境。它采用一種很巧妙的辦法減少自己的體積:所有的命令都通過“插件”的方式集中到一個可執行文件中,在實際應用過程中通過不同的符號鏈接來確定到底要執行哪個操作。例如最終生成的可執行文件為busybox,當為它建立一個符號鏈接ls的時候,就可以通過執行這個新命令實現列出目錄的功能。采用單一執行文件的方式最大限度地共享了程序代碼,甚至連文件頭、內存中的程序控制塊等其他系統資源都共享了,對于資源比較緊張的系統來說,真是最合適不過了。在busybox的編譯過程中,可以非常方便地加減它的“插件”,最后的符號鏈接也可以由編譯系統自動生成。
下面用busybox構建FS2410開發板的cramfs文件系統。
首先從busybox網站下載busybox源碼(本實例采用的busybox-1.0.0)并解壓,接下來,根據實際需要進行busybox的配置。
[root@localhost?fs2410]#?tar?jxvf?busybox-1.00.tar.bz2
[root@localhost?fs2410]#?cd?busybox-1.00
[root@localhost?busybox-1.00]#?make?defconfig??/*?首先進行默認配置?*/
[root@localhost?busybox-1.00]#?make?menuconfig
此時需要設置平臺相關的交叉編譯選項,操作步驟為:先選中“Build?Options”項的“Do?you?want?to?build?Busybox?with?a?Cross?Complier?”選項,然后將“Cross?Compiler?prefix”設置為“/usr/local/arm/3.3.2/bin/arm-linux-”(這是在實驗主機中的交叉編譯器的安裝路徑)。
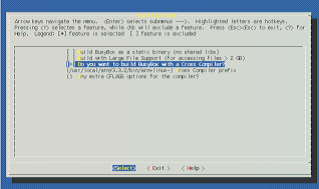
圖5.26??busybox配置畫面
下一步編譯并安裝busybox。
[root@localhost?busybox-1.00]#?make
[root@localhost?busybox-1.00]#?make?install?PREFIX=/home/david/fs2410/cramfs
其中,PREFIX用于指定安裝目錄,如果不設置該選項,則默認在當前目錄下創建_install目錄。創建的安裝目錄的內容如下所示:
[root@localhost?cramfs]#?ls
bin??linuxrc??sbin??usr
從此可知,使用busybox軟件包所創建的文件系統還缺少很多東西。下面我們通過創建系統所需要的目錄和文件來完善一下文件系統的內容。
[root@localhost?cramfs]#?mkdir?mnt?root?var?tmp?proc?boot?etc?lib
[root@localhost?cramfs]#?mkdir?/var/{lock,log,mail,run,spool}
如果busybox是動態編譯的(即在配置busybox時沒選中靜態編譯),則把所需的交叉編譯的動態鏈接庫文件復制到lib目錄中。
接下來,需要創建一些重要文件。首先要創建/etc/inittab和/etc/fstab文件。inittab是Linux啟動之后第一個被訪問的腳本文件,而fstab文件是定義了文件系統的各個“掛接點”,需要與實際的系統相配合。接下來要創建用戶和用戶組文件。
以上用busybox構造了文件系統的內容,下面要創建cramfs文件系統映像文件。制作cramfs映像文件需要用到的工具是mkcramfs。此時可以采用兩種方法,一種方法是使用我們所構建的文件系統(在目錄“/home/david/fs2410/cramfs”中),另一種方法是在已經做好的cramfs映像文件的基礎上進行適當的改動。下面的示例使用第二種方法,因為這個方法包含了第一種方法的所有步驟(假設已經做好的映像文件名為“fs2410.cramfs”)。
首先用mount命令將映像文件掛載到一個目錄下,打開該目錄并查看其內容。
[root@localhost?fs2410]#?mkdir?cramfs
[root@localhost?fs2410]#?mount?fs2410.cramgs?cramfs?–o?loop?
[root@localhost?fs2410]#?ls?cramfs
bin??dev??etc??home??lib??linuxrc??proc??Qtopia??ramdisk??sbin??testshell??tmp??usr??var
因為cramfs文件系統是只讀的,所以不能在這個掛載目錄下直接進行修改,因此需要將文件系統中的內容復制到另一個目錄中,具體操作如下所示:
[root@localhost?fs2410]#?mkdir?backup_cramfs
[root@localhost?fs2410]#?tar?cvf?backup.cramfs.tar??cramfs/
[root@localhost?fs2410]#?mv?backup.cramfs.tar?backup_cramfs/
[root@localhost?fs2410]#?umount?cramfs
[root@localhost?fs2410]#?cd?backup_cramfs
[root@localhost?backup_cramfs]#?tar?zvf?backup.cramfs.tar
[root@localhost?backup_cramfs]#?rm?backup.cramfs.tar
此時我們就像用busybox所構建的文件系統一樣,可以在backup_cramfs的cramfs子目錄中任意進行修改。例如可以添加用戶自己的程序:
[root@localhost?fs2410]#?cp?~/hello?backup_cramfs/cramfs/
在用戶的修改工作結束之后,用下面的命令可以創建cramfs映像文件:
[root@localhost?fs2410]#??mkcramfs?backup_cramfs/cramfs/?new.cramfs
接下來,就可以將新創建的new.cramfs映像文件燒入到開發板的相應位置了。
2.NFS文件系統
NFS為Network?File?System的簡稱,最早是由Sun公司提出發展起來的,其目的就是讓不同的機器、不同的操作系統之間通過網絡可以彼此共享文件。NFS可以讓不同的主機通過網絡將遠端的NFS服務器共享出來的文件安裝到自己的系統中,從客戶端看來,使用NFS的遠端文件就像是使用本地文件一樣。在嵌入式中使用NFS會使應用程序的開發變得十分方便,并且不用反復地燒寫映像文件。
NFS的使用分為服務端和客戶端,其中服務端是提供要共享的文件,而客戶端則通過掛載(“mount”)這一動作來實現對共享文件的訪問操作。下面主要介紹NFS服務端的使用。在嵌入式開發中,通常NFS服務端在宿主機上運行,而客戶端在目標板上運行。
NFS服務端是通過讀入它的配置文件“/etc/exports”來決定所共享的文件目錄的。下面首先講解這個配置文件的書寫規范。
在這個配置文件中,每一行都代表一項要共享的文件目錄以及所指定的客戶端對它的操作權限。客戶端可以根據相應的權限,對該目錄下的所有目錄文件進行訪問。配置文件中每一行的格式如下:
[共享的目錄]?[客戶端主機名稱或IP]?[參數1,參數2…]
在這里,主機名或IP是可供共享的客戶端主機名或IP,若對所有的IP都可以訪問,則可用“*”表示。這里的參數有很多種組合方式,常見的參數如表5.1所示。
表5.1 常見參數
選????項
參?數?含?義
rw
可讀寫的權限
ro
只讀的權限
no_root_squash
NFS客戶端分享目錄使用者的權限,即如果客戶端使用的是root用戶,那么對于這個共享的目錄而言,該客戶端就具有root的權限
sync
資料同步寫入到內存與硬盤當中
async
資料會先暫存于內存當中,而非直接寫入硬盤
如在本例中,配置文件“/etc/exports”的代碼如下:
[root@localhost?fs]#?cat?/etc/exports
/root/workplace????192.168.1.*(rw,no_root_squash)
在設定完配置文件之后,需要啟動nfs服務和portmap服務,這里的portmap服務是允許NFS客戶端查看NFS服務在用的端口,在它被激活之后,就會出現一個端口號為111的sun?RPC(遠端過程調用)的服務。這是NFS服務中必須實現的一項,因此,也必須把它開啟。如下所示:
[root@localhost?fs]#?service?portmap?start
啟動?portmap:????????????????????????????????????[確定]
[root@localhost?fs]#?service?nfs?start
啟動?NFS?服務:????????????????????????????????????[確定]
關掉?NFS?配額:????????????????????????????????????[確定]
啟動?NFS?守護進程:????????????????????????????????[確定]
啟動?NFS?mountd:????????????????????????????????[確定]
可以看到,在啟動NFS服務的時候啟動了mountd進程。這是NFS掛載服務,用于處理NFS遞交過來的客戶端請求。另外還會激活至少兩個以上的系統守護進程,然后就開始監聽客戶端的請求,用“cat?/var/log/messages”命令可以查看操作是否成功。這樣,就啟動了NFS的服務,另外還有兩個命令,可以便于使用NFS。
其中一個是exportfs,它可以重新掃描“/etc/exports”,使用戶在修改了“/etc/exports”配置文件之后不需要每次重啟NFS服務。其格式為:
exportfs?[選項]
exportfs的常見選項如表5.2所示。
表5.2 常見選項
選????項
參?數?含?義
-a
全部掛載(或卸載)/etc/exports中的設定文件目錄
-r
重新掛載/etc/exports中的設定文件目錄
-u
卸載某一目錄
-v
在export的時候,將共享的目錄顯示到屏幕上
另外一個是showmount命令,它用于當前的掛載情況。其格式為:
showmount?[選項]?hostname
showmount的常見選項如表5.3所示。
表5.3 常見選項
選????項
參?數?含?義
-a
在屏幕上顯示目前主機與客戶端所連上來的使用目錄狀態
-e
顯示hostname中/etc/exports里設定的共享目錄
?










 工商網監
工商網監
評論