 電子發燒友App
電子發燒友App


? 引 言
MultiBus-CPU模塊是基于AT91RM9200微控制器的智能化多總線測控模塊。該CPU模塊主要實現對下位機的控制,并建立基于Modbus-RTU總線協議的總線通信體系結構,讓系統設備可以無縫接入基于Modbus-RTU模式的總線系統,可靠、實時、準確地實現工業現場數據采集、信號輸出等功能;同時,提供標準視頻接口用于顯示16位色圖像,提供標準音頻輸入輸出接口用于實現錄放音功能。該模塊作為嵌入式開發環境的核心,可實現人機界面的交互操作和顯示、海量數據的存儲、多串口、多USB口、音頻信號輸入輸出、以太網口等接口;運行Linux操作系統,可以快速搭建面向應用的嵌入式應用系統。
1 MultIBus-CPU模塊軟件設計方案
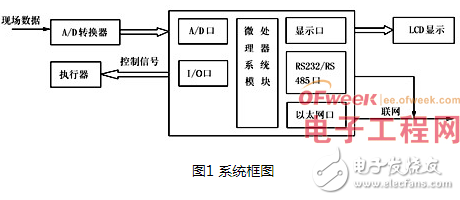
為了滿足實際應用對實時性的要求,MultiBus-CPU模塊軟件采用了Linux 2.6.21操作系統。其中,Linux 2.6的內核任務可以被搶占,這一特性使得Linux 2.6內核適用于實時系統和嵌入式系統中。驅動程序在Linux環境下進行開發,應用層采用標準的通信協議——Modbus協議,控制設備可以連成工業網絡進行集中監控。通過一致的Modbus接口,MultiBus-CPU模塊與擴展下位機均可作為對等設備在工業網絡中進行對話,使得各個設備無縫接人到工業控制網絡中。MNtiBus-CPU模塊支持現階段工業測控系統中最常用的以太網(UDP)通信及RS485通信協議。因此,本模塊在與其他功能模塊進行通信時,采用Modbus-RTU數據通信方式,利用以太網(UDP)/RS485總線進行數據的發送與接收,實現對各功能模塊的集中監控。軟件總體結構如圖1所示。

2 MultiBus-CPU模塊硬件設計方案
硬件設計原理圖如圖2所示。MultiBus-CPU模塊選用Atmel公司的AT91RM9200為主處理器,融合了ARM920T ARM Thumb處理器。其工作于180 MHz時性能高達200 MIPS;具備存儲器管理單元,可以運行Linux等實時操作系統;具備10/100 Base-T型以太網卡接口,只需外擴一個PHY即可實現以太網通信;具備USB 2.0全速(12 Mb/s)主機雙端口,可以擴展鍵盤、鼠標、U盤等標準外設。
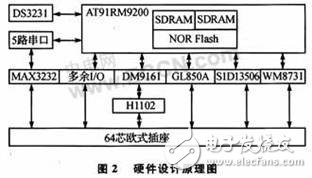
主處理器AT91RM9200具備5個串口:1個DEBUG串口,設計為RS232接口,可以直接連接PC的串口進行調試;1個RS485接口,可以與其他功能模塊的RS485接口組成網絡;其余3個串口均設計為RS232接口。
通過CPU模塊的外部總線和Epson公司的S1D13506顯示芯片擴展了一個VGA接口,分辨率為640×480,256色。IS41LVl6100為其提供獨立顯存,容量為1M×16位,支持EDO PAGE模式。
GL850A芯片是一個低功耗的USB 2.0 HUB控制器,AT91RM9200本身的USB HOST接口通過GL850A芯片擴展為4個USB HOST接口。
DS3231是精度非常高的I2C集成實時時鐘。其精度在0~40℃內高達±2 ppm,在-40~85℃內精度可達±3.5ppm;板載電池,掉電后可以保持時間;可為系統提供秒、分、小時、日、日期、月、年等信息,具有自動閏年調整功能。
WM8731是一個低功耗網絡音頻編解碼器(CODEC),具有輸出功率放大器和可編程采樣速率設定功能。WM8731芯片通過I2S接口與CPU連接,為CPU模塊擴展了音頻信號的輸入輸出接口,使系統具備音頻采樣功能,音頻信號數字化后可以通過以太網傳送。
DM9161為10/100M快速以太網物理層單芯片收發器,H1102為網絡隔離變壓器,用于實現10/100M自適應的可靠網絡傳輸功能。
MultiBus-CPU模塊通過增加顯示控制芯片及其驅動實現了顯示接口,系統運行信息可以直接通過VGA顯示器顯示出來,大大提高了人機交互的可操作性。
3 顯示模塊硬件設計方案
3.1 接口芯片選擇
接口芯片選用Epson公司生產的大規模顯示控制器S1D13506。它是以SEDl354控制器為基礎發展起來的具有更多功能的LCD顯示控制器,支持全類型、大規模的LCD及CRT/TV顯示器。S1D13506內置RAMDAC(Random Access Memory Digital-to-Analog Converter,隨機數模轉換記憶體)硬件X-Y軸轉置二維加速器,共有114個寄存器,可以靈活地設置各種不同的顯示方式。
3.2 接口硬件設計
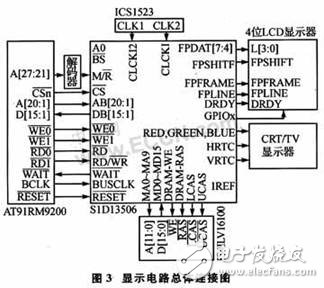
S1D13506與處理器的接口采用通用類型總線(包括數據總線、地址總線、控制總線)。接口定義如表1所列。芯片所用像素時鐘CLK1、CLK2是由同步信號發生器ICS1523來提供的,外接1M×16位的EDO-DRAM IS41LV16100。

圖3是顯示電路總體連接圖。S1D13506連接到AT9IRM9200的信號有:M/R、AB1~AB20、DB1~DB15、WE0、WE1、RD、RD/WR、CS、RFSET、BUSCLK、WAIT。連接到ICSl523的信號有:CLCKI、CLCK12(用于內部顯示及外部媒體接口時鐘)。連接到IS41LVl6100的信號有:DRAM-WE、DRAM-RAS、LCAS、UCAS、MA0~MA9、MD0~MD15。其中,MD1、MD2、MD4、MD6、MD15需要外接上拉電阻用于S1D13506初始配置。其他控制信號連接到LCD/CRT顯示器。S1D13506芯片有個測試使能引腳TFSTEN在芯片正常工作時接地。如果不使用RAMDAC的數模轉換功能,那么IREF引腳必須接地。ICS1523通過I2C串行總線(TWD、TWCK)接受AT91RM9200對它的寄存器配置。本設計中,ICS1523的輸入時鐘是50 MHz,輸出CLK1為25 MHz,CLK2為12.5 MHz。
4 顯示模塊軟件設計方案
4.1 Linux下LCD驅動程序開發
在Linux內核中,設備驅動程序是一個個獨立的“黑盒子”,可以使某個特定的硬件響應一個定義良好的內部編程接口,同時完全隱藏了設備的工作細節,用戶操作只需要通過一組標準化的調用即可完成。把這些調用映射到設備特定的操作上,則是設備驅動程序的任務。而每一個設備都可以看作是一個文件,所以打開的設備在內核中都可以由一個File結構標識,內核使用File_operations結構訪問驅動程序的函數。每個文件(設備)都與它自己的函數集相關聯。這些操作函數主要負責上面所提到的系統調用的實現,并因此被命名為open、read、fork、ioctl等。
LCD控制器的功能是顯示驅動信號,進而驅動LCD。用戶只需要通過讀寫一系列的寄存器,就可以配置和顯示驅動。配置LCD控制器時,最重要的一步是幀緩沖區(FrameBuffer)的指定。幀緩沖區為圖像硬件設備提供了一種抽象化處理,它代表了一些視頻硬件設備,允許應用軟件通過定義明確的界面來訪問圖像硬件設備。用戶程序只需與幀緩沖驅動程序抽象出來的接口打交道,就可以把要顯示的內容從緩沖區中讀出,從而顯示到屏幕上。
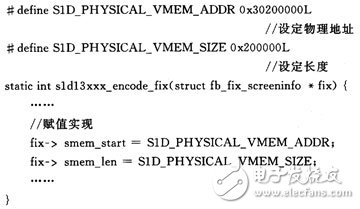
在FrameBuffer驅動程序中,最核心的結構體是幀緩沖區驅動程序接口,即struct fb_info。它記錄了當前FrameBuffer硬件設備的狀態,通常在Linux的include/Linux/fb.h中定義。最主要的結構體有:Struct fb_fiX_sereeninfo,定義顯示輸出設備自身的屬性,如屏幕緩沖區的物理地址和長度;Struct fb_var_screeninfo,記錄幀緩沖設備和指定顯示模式的可修改信息,包括顯示屏幕的分辨率、每個像素的比特數和一些時序變量。
若要先設定幀緩沖區的物理地址和長度,就要在S1D13506.h里指定,然后在驅動程序里通過對fb_fix_screeninfo賦值來實現:
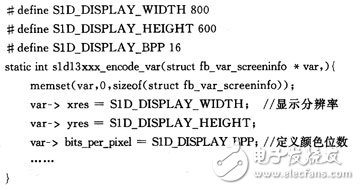
定義當前顯示輸出狀態,通過對fb_var_screeninfo結構賦值來實現:
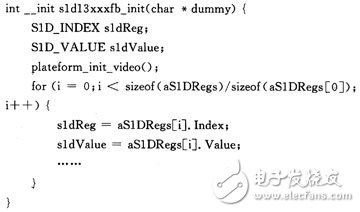
Linux下驅動程序總是先調用module_init(),因此LCD初始化通過調用module_init(sldl3xxxfb_init)來實現。sldl3xxxfb_init初始化函數部分代碼如下:
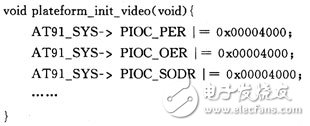
首先對LCD的背光燈進行點亮。LCD顯示是一種被動的顯示模式,不能發光,只能依靠控制透射或反射周圍環境的光來達到顯示的目的。因此,必須通過寫寄存器用高電平指示對LCD加3.2 V電壓來實現背光燈的點亮。其函數的部分代碼如下:
系統采用的彩色LCD最佳分辨率是800×600,但通過前面對結構Struct fb_var_screeninfo的賦值并不能真正設定其分辨率。因為結構Struct fb_var_screeninfo的值只是作為一個顯示記錄來用,必須通過設定寄存器的值才能達到需要的分辨率。本系統在S1D13506.h頭文件里用一個數組對寄存器的設置作了一個預定義,然后在初始化函數里利用sldReg和sldValue兩個實參寫入,從而設定了寄存器的值。
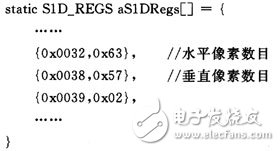
數組里每個元素的第1個值代表寄存器的名稱,第2個值代表要設定的數值(1個十六進制的數)。32h寄存器用于設定LCD顯示的水平像素數目,計算方法是把第2個值轉換成十進制,加1再乘以8就得出水平像素。例如,0x63換算成十進制為99,加1乘以8就是800。38h和39h寄存器分別設置成0x57和Ox02,就可以顯示600的垂直分辨率。計算方法是以39h寄存器的bitO和bitl位為高位,38h寄存器的bit0~bit7為低位,組成的一個十六進制的數,再轉換成十進制。除了要修改這3個寄存器外,34h和3Ah這兩個寄存器也會對顯示的分辨率有影響。
幀緩沖設備也屬于字符設備,要通過“文件層一驅動層”的接口方式來對LCD進行驅動,就必須對File_operationes數據結構的參數fh_ops進行填充,并實現其對應的成員函數。本系統在include/Limix/fb.h中定義了幀緩沖區的文件操作,部分代碼如下:
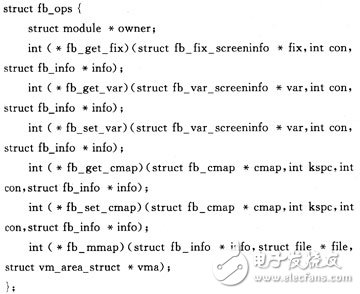
這個結構中的每一個字段都必須指向驅動程序中實現特定操作的函數。對于不支持的操作,對應的字段可以被置為NULL,或留到后續開發時再添加。本模塊中實現特定操作的成員函數的代碼如下:
接下來把一些調用的函數寫完整,編寫好程序后用arm-linux-gcc編譯驅動模塊;然后對其動態加載,或靜態將其編譯到Linux內核;加載完程序后,就可以編寫應用程序進行讀/寫等操作了。
4.2 MiniGUI的移植
在嵌入式開發環境中,獨立的顯示操作人機界面是非常必要的。它可以使嵌入式系統對PC系統的依賴性降到最低,可以直接操作嵌入式系統并顯示運行結果。MultiBus-CPU模塊采用標準的USB鍵盤、USB鼠標、VGA顯示器作為人機交互界面,使用習慣類同于PC機,簡易了開發者的開發過程,并且用戶的使用過程也變得簡單、快捷、易于操作。
MiniGUI是遵循GPL條款發布的自由軟件,其目標是為基于Linux的實時嵌入式系統提供一個輕量級的圖形用戶界面支持系統。與QT/Embedded、MicoroWindows等其他GUI相比,MiniGUI的最顯著特點就是輕型、占用資源少。據稱MiniGUI能夠在CPU主頻為30MHz、僅有4 MB RAM的系統上正常運行,這是其他多種GUI所無法達到的。
MiniGUI在AT91RM9200上的移植包括4個步驟:
①構建Linux交叉編譯環境。通常使用的交叉編譯工具是arm-Linux-gcc2.95.3版本。下載此交叉編譯工具后在Linux內安裝好,并且在PATH中添加/usr/local/arm-Linux/bin路徑,交叉編譯環境就構建好了。
②交叉編譯MiniGUI,這是最關鍵的一步。首先從網上下載MiniGUI源程序包(包括庫文件和資源文件),以及其他支持圖形界面的源程序包;然后用上一步安裝好的交叉編譯工具對其進行編譯,編譯時可指定編譯后庫文件及資源文件的安裝位置。
③拷貝MiniCUI資源到開發板。將第2步編譯好的庫文件及資源文件拷貝到開發板上。拷貝之前先用arm-Linux-strip命令清除文件中的調試信息,這樣就使文件體積大大縮小,可以滿足嵌入式系統的需要。
④板載Linux的MiniGUI環境配置。將第2步安裝好的MiniGUI配置文件MiniGUI.cfg下載到板子中,并將其中fbcon的defaultmode設置為合適的顯示模式。
結 語
本文基于嵌入式技術設計了一種MultiBus-CPU模塊,能夠滿足各種嵌入式開發環境的設計要求。該模塊軟硬件均采用模塊化設計,采用國外廣泛應用的ModBus通信協議,可滿足工業現場的測控需要。









 工商網監
工商網監
評論