 電子發燒友App
電子發燒友App


1、 節點組成
節點是無線傳感器網絡中部署到研究區域中用于收集和轉發信息、協作完成指定任務的對象。每個節點上運行的程序可以是完全相同的,唯一不同的是其ID。
1.1 節點構成
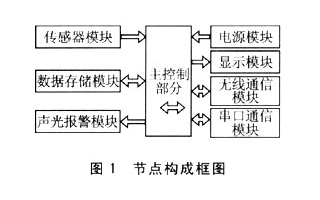
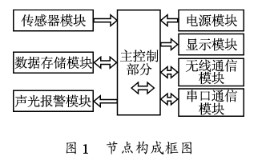
無線傳感器節點由傳感器模塊、處理器模塊、無線電通信模塊和能量供應模塊4部分組成,整個結構如圖1所示。
圖1 無線傳感器節點構成框圖
本質上,無線傳感器節點就是一個網絡化的分布式嵌入式系統,通過無線信道實現網絡間的通信。為了減少通信量,在本地完成必要計算進行數據融合,從而協作完成部署空間數據的采集。在應用上體現以網絡為中心,節點的功能通過網絡來體現。因而傳統的嵌入式設計思想在無線傳感器網絡中遇到許多挑戰:節點中運行程序存在大量并行和節點協同計算。
1.2 節點特點
無線傳感器網絡是應用相關性網絡,不同應用領域使用不同的網絡技術實現。由于無線傳感器節點是用于監測的,分布密度大且范疇廣,因此必須低成本、低功耗和小尺寸。從現有技術條件來看,值得考慮的是節點成本和能源補給。節點不可能采用太高的頻率,因為頻率與能量的消耗是正相關的,頻率高則能量消耗大。另外無線電通信模塊能量消耗也大,傳送距離同能量消耗也是正相關的,因而須在發送距離和節點數之間做出權衡。
1.3 Mica節點?
加州大學伯克利分校主持開發的低功耗無線傳感器節點Mica,處理器芯片采用Atmel公司的AVR系列(TI公司的 MSP430也是不錯的選擇),無線電收發模塊采用TR1000或CC10000,外加相應傳感器接口,實現了無線傳感器節點,如圖2所示。節點間通過無線電方式進行通信,協作完成指定任務;節點自身通過ADC通道來感知外界數據。
圖2 Mica節點實物圖
Mica節點上可感知多個不同物理量:光強度、溫度、地磁強度等。https://www.tinyos.net/網站提供了其實現的硬件布線圖,加州大學伯克利分校研發人員為這個平臺開發出微型操作系統TinyOS和編程語言nesC,同時國內外很多大學和機構利用這一平臺進行相關問題的研究。
無線傳感器網絡與現在傳感器技術最大的不同在于,將現有的傳感器技術進行網絡化,使傳感器技術應用更好,為現在傳感器技術提供更新的解決方法。
2、 節點上微型操作系統
無線傳感器網絡節點存儲容量有限。通過研究發現,要滿足其自身網絡運行的需要,可以使用一種新的嵌入式系統和嵌入式軟件來實現。
2.1 操作系統需求
從對節點結構分析不難看出,無線傳感器節點硬件簡單,可以直接在硬件上進行編程。但這在工程實踐中產生許多問題:應用程序開發的難度大大增加,程序員必須對硬件十分了解;程序員無法繼承現有的軟件成果,延長開發周期;無法形成規模化,使用新的芯片,上層模塊都必須改寫。
從現有軟件技術來看,無線傳感器可以直接使用現有的嵌入式操作系統。現有嵌入式操作系統大多是實時操作系統,很少考慮能源供應,而無線傳感器一個致命點就是能源供應無法解決;現有嵌入式操作系統大多所占用空間很大,而無線傳感器另一個致命點又是存儲容量有限。
無線傳感器節點有兩個突出特點:一個是消息到達的并發性,很密集,即存在多個需要同時執行的邏輯控制,需要操作系統在較短時間內完成這些頻繁發生的操作;另一個是無線傳感器節點模塊化程序高,要求操作系統為應用程序對硬件控制提供方便操作。
2.2 TinyOS操作系統
操作系統就是為用戶提供一個良好的用戶接口。基于以上分析,研發人員在無線傳感器節點處理能力和存儲能力有限情況下設計一種新型的嵌入式系統TinyOS,具有更強的網絡處理和資源收集能力,滿足無線傳感器網絡的要求。
為滿足無線傳感器網絡的要求,研究人員在TinyOS中引入4種技術:輕線程、主動消息、事件驅動和組件化編程。
輕線程主要是針對節點并發操作可能比較頻繁,且線程比較短,傳統的進程/線程調度無法滿足(使用傳統調度算法會產生大量能量用在無效的進程互換過程中)的問題提出的。
主動消息是并行計算機中的概念。在發送消息的同時傳送處理這個消息的相應處理函數ID和處理數據,接收方得到消息后可立即進行處理,從而減少通信量。
整個系統的運行是因為事件驅動而運行的,沒有事件發生時,微處理器進入睡眠狀態,從而可以達到節能的目的。
組件就是對軟硬件進行功能抽象。整個系統是由組件構成的,通過組件提高軟件重用度和兼容性,程序員只關心組件的功能和自己的業務邏輯,而不必關心組件的具體實現,從而提高編程效率。
2.3 TinyOS操作系統的實現
TinyOS操作系統最初是用C語言實現的,產生的目標代碼比較長。后來研究設計出基于組件化和并行模型的nesC語言,產生的目標代碼相對較小。用nesC語言可開發TinyOS操作系統和其上運行的應用程序。
2.3.1 接口
接口(interface)是一個雙向通道,表明接口具有的功能和事件通知能力是雙向的,向調用者提供命令和實現命令者進行事件通告。
interface name {
asy commandresult_t Cname(pram p);
asy eventresult_tEname(pram p);
}
其示意圖如圖3所示。
圖3 接口示意圖
在接口中聲明命令和事件實現不同的功能,命令是接口具有的功能,事件是接口具有通告事件發生的能力。Asy可以命令或事件在中斷處理程序中調用。
接口體現事件驅動功能和模塊化。通過事件通告讓使用接口者對事件進行響應;任何滿足接口功能的實現者都可被其他需要這個接口功能的組件調用。
2.3.2 組件
組件是配線文件或模塊文件,是邏輯功能的抽象。程序員完全可直接調用組件進行程序開發。
配線文件只是完成組件之間的接口連接,模塊文件則具體實現接口中的命令和事件。在這兩個文件中都可使用provides、uses語句。provides表明這個組件可以提供哪些接口,實現這些接口的命令和事件通知。uses表明這個組件使用哪些接口,組件可以接口中提供的命令和實現對接口中事件進行響應。組件結構如圖4所示。

圖4 組件結構圖
基于組件的思想,一個組件可通過多個組件實現一定的邏輯功能,對外聲明需要哪些接口和提供哪些接口。圖5所示為由組件A、B和C形成的新功能組件D。
圖5 組件D結構圖
2.3.3 并行模型
通過任務(task)和中斷處理事件(interrupt hander event)來體現TinyOS并行處理能力。任務(task)會加入一個FIFO隊列中,執行過程中,任務間沒有競爭;但中斷處理程序可以打斷任務執行。TinyOS采用二級調度機制來滿足無線傳感網絡運行特點,整個程序調度過程如圖6所示。組件中完成任務提交,由操作系統完成調度。
圖6 TinyOS程序結構框圖
基于以上分析,一個節點上應用程序的框圖如圖7所示。操作系統只是在后臺提供隊列服務。
圖7 應用程序結構框圖
3、 具體實現說明
現以節點收發計數器中的數值為例,更為詳細地說明網絡協議是如何通過主動消息傳遞來實現的。
程序要求節點啟動以后,開始讓計數器計數,每秒向外廣播自己的計數值,同時接收其他節點上計數器的值。
3.1 main組件
TinyOS應用程序從main組件開始,完成main組件的StdControl接口的3個命令init()、start()和stop()的具體實現。這個接口中命令執行次序可用init*(start|stop)*,應用程序執行前執行init()完成必要初始化工作,start是這個程序要完成的工作,stop是系統關閉前所要執行的動作。這個接口是TinyOS應用程序標準接口,與硬件操作相關的其他組件必須用到這個接口,實現接口中的命令。
3.2 使用的接口
StdControl接口完成應用程序啟動及相關硬件初始化。
interface StdControl {
command result_t init();
command result_t start();
command result_t stop();
}
Timer接口實現計數功能。
interface Timer {
command result_t start(char type, uint32_t interval);
//設定觸發類型和計數值
command result_t stop()
//中止計數器
event result_t fired();
//計數器定時觸發事件
}
SendMsg接口發送消息。
interface SendMsg {
command result_t send(uint16_t address, uint8_t length, TOS_MsgPtr msg);
//發送消息
event result_t sendDone(TOS_MsgPtr msg, result_t success);
//消息發送完成以后事件
}
ReceiveMsg接口接收消息。
interface ReceiveMsg {
event TOS_MsgPtr receive(TOS_MsgPtr m);
//接收到消息事件
}
3.3 使用的組件
組件Main, test5M,TimerC,GenericComm as Comm實現邏輯功能。Main是系統必需的。test5M提供接口的命令并實現對調用接口事件的響應。GenericComm完成消息的發送和對接收消息的通告。其配線文件如下:
Main.StdControl -》 test5M.StdControl;
Main.StdControl -》 TimerC.StdControl;
test5M.Timer -》 TimerC.Timer[unique(“Timer”)];
test5M.SubControl-》Comm;
test5M.Send -》 Comm.SendMsg;
test5M.Receive-》Comm.ReceiveMsg;
3.4 test5M模塊文件
test5M模塊接口如下:
module test5M {
provides {
interface StdControl;
}
uses {
interface Timer;
interface SendMsg as Send[uint8_t id];//發送消息接口
interface ReceiveMsg as Receive[uint8_t id];//接收消息
interface StdControl as SubControl;//子組件:完成發送初始化
}
}
provides聲明這個組件所實現接口中命令和通告相關事件的產生。需要實現StdControl接口中命令init()、start()和stop()。
Uses聲明這個組件調用接口中命令并對接口中事件進行響應。所需要響應的事件為Timer接口的fired()事件、SendMsg接口的sendDone事件和ReceiveMsg接口的receive事件。
3.5 通信實現
test5M發送和接收消息是通過組件GenericComm來實現的。GenericComm通過調用其他組件實現從消息包到主動消息、字節級數據傳數、位級數據傳送到無線電收發模塊的功能。在此不再深入分析其實現過程,采用隨機后退的CSMA/AD的MAC協議,只要明白組件GenericComm就可以完成消息的收發。
GenericComm提供了256個消息收發接口,也就是說系統可以使用256種消息,或者說256種狀態進行轉換。由于系統是非阻塞模式,一旦消息到達組件test5M中,receive事件就會立刻調用,因此在這個事件中實現不同消息的轉換,從而實現通信雙方的握手:
event TOS_MsgPtr Receive.receive[uint8_t id](TOS_MsgPtr m) {
switch(id) {
case 1: //狀態轉換1
case 2: //狀態轉換2
}
return m;
}
4、結語
分析無線傳感器節點Mica和其上運行的TinyOS操作系統出發,描述無線傳感器網絡節點體系結構,通過應用程序開發說明其通信模型建立思路,著重描述無線傳感器網絡節點應用程序體系結構和消息通信機制。
責任編輯:gt











 工商網監
工商網監
評論