 電子發燒友App
電子發燒友App


對圖像監控系統,用戶常常提出這樣的功能需求:希望能夠監控距離較遠的對象 這些對象有可能分布在郊區、深山,荒原或者其他無人值守的場合;另外,希望能夠獲取比較清晰的監控圖像,但對圖像傳輸的實時性要求并不高 很明顯,用傳統的PC機加圖像采集卡的方式很難滿足這樣的需求。
在嵌入式領域,ARM9系列微處理器在高性能和低功耗方面提供了最佳的性能,因此選用ARM9嵌入式處理器S3C2440設計實現了一個遠程圖像光線監控系統通過這個系統,可以遠在千里之外控制一個攝像機進行圖像采集并回傳。如果這個攝像機有一個485接口的云臺,還可以通過互聯網遠程控制攝像機的取景角度、鏡頭拉伸、聚焦等功能 除了獲取圖像數據.系統還提供了多路開關控制和數據采集功能,可以連接溫度、濕度等各類傳感器和控制紅外夜視燈等其他外部設備的開關狀態。最后,通過GPRS或CDMA無線通信模塊及Internel互聯網將數據傳至任何地方。
1 系統設計
本系統采用三星公司的S3C2440嵌入式處理器和arm-linux 2.4.26操作系統;S3C2440使用ARM920T內核,主頻是400 MHz;除了集成通用的串口控制器、USB控制器、A/D轉換器和GPIO等功能之外,還集成了一個攝像頭接門(CAMIF)(這個接口是遠程圖像采集的核心部分)。系統在S3C2440處理器的控制下,從CCD攝像機采集模擬視頻信號,然后經過編碼、DMA傳輸到內存緩沖,接著由軟件對內存中的數字視頻數據進行壓縮和打包.最后通過通信單元將圖像以IP包的方式發送到監控中心的服務器。整個系統的硬件結構原理如圖1所示

1.1 圖像采樣接口
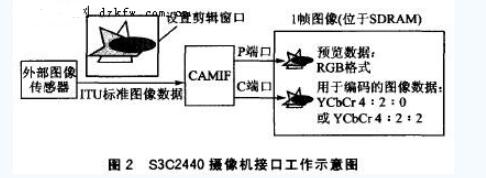
S3C2440的攝像頭接口(CAMIF)支持ITU-R BT.601/656 YCbCr 8比特標準的圖像數據輸入,最大可采樣4096×4096像素的圖像。攝像頭接口可以有兩種模式與DMA控制器進行數據傳輸:一種是P端口模式,把從攝像頭接口采樣到的圖像數據轉為RGB數據,并在DMA控制下傳輸到SDRAM(一般這種模式用來提供圖像預覽功能);另一種是C端口模式,把圖像數據按照YCbCr 4:2:0或4:2:2的格式傳輸到SDRAM(這種模式主要為MPEG-4、H.263等編碼器提供圖像數據的輸入)。上述兩種工作模式都允許設置一個剪輯窗口,只有進入這個窗口的圖像數據才能夠傳輸到SDRAM。上述過程可用圖2說明。
S3C2440的攝像機接口接收ITU標準的圖像數據,不能直接接收CCD攝像機輸出的模擬視頻信號,因此還需要1片SAA7113視頻解碼芯片。SAA7113可以輸入4路模擬視頻信號,通過內部寄存器的不同配置可以對4路輸入進行轉換,輸入可以為4路CVBS或2路S視頻(Y/C)信號,輸出8位“VPO”總線,為標準的ITU 656、YUV 4:2:2格式。對SAA7113初始化需要通過I2C 總線進行,而S3C2440內部集成的I2C控制器正好可以實現這個過程。S3C2440 的攝像機接口與SAA7113的連接原理如圖3所示。
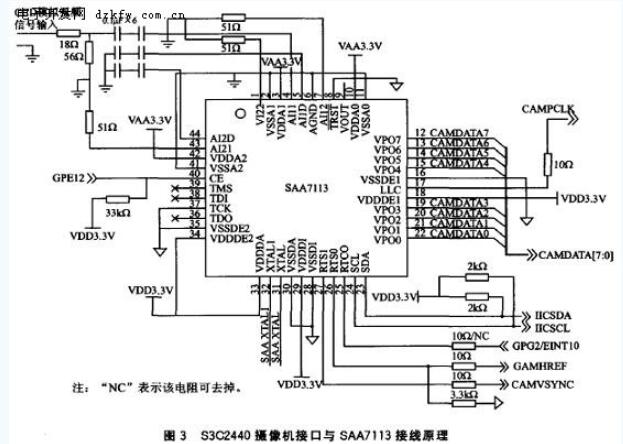
SAA7113 的CE 引腳與S3C2440 的一個GPIO 引腳相連,這樣可以控制SAA7113的工作狀態。當無須采集圖像時,將該GPIO 口輸出低電平,使SAA7113芯片處于低功耗狀態,節省電能的消耗。
對照圖2和圖3可以看出,SAA7113芯片就是圖2的“外部圖像傳感器”。它向嵌入式系統的攝像機接口提供了采樣到的標準ITU 視頻數據。這些數據經過DMA的P端口或C端口控制傳輸到了內存,這樣就可以在內存中對圖像數據作進一步的加工處理。
1.2 圖像采樣接口的驅動
按照Linux視頻設備驅動的模型V4L(video for Linux)編寫了SAA7113與S3C2440攝像機接口的驅動。驅動使用C端口模式與DMA進行通信。采樣1幀圖像之前,首先設置采樣圖像的分辨率和剪輯窗口大小等參數,然后設置DMA控制器訪問的視頻采樣輸出緩沖的內存地址,接著就可以通過設置S3C2440的CAMIF接口控制寄存器啟動1幀圖像的采集。當采集完1幀圖像時,CAMIF接口會自動啟動1次C端口的DMA通信,把采集的圖像數據傳到內存。傳輸結束后,會產生一個C端口的中斷,通知驅動1幀數據采樣和傳輸結束。具體來說,這個驅動需要實現以下功能:
初始化S3C2440的CAMIF接口的時鐘寄存器。主要是根據SAA7113的外接晶振頻率設置攝像機時鐘分頻寄存器(CAMDIVN)。該寄存器的0~3位是分頻系數,其計算方法是:
CAMCLK_DIV=UPLL/(CAMCLK * 2)-1
(初始化代碼略— — 編者注)
配置CAMIF接口的采樣參數。主要是輸入源圖像數據的格式、輸出的圖像格式、采樣的窗口大小、DMA的訪問地址等參數。這里定義了一個結構,用于存儲與CAMIF接口相關的配置信息:
struct s3c2440_camif_cfg_t {
int src_x; //輸入的源圖像寬度
int src_y; //輸入的源圖像高度
int dst_x; //輸出的目標圖像寬度
int dst_y; //輸出的目標圖像高度
int dst_fmt; //輸出的目標圖像數據格式
int pre_x; //預覽通道(P端口模式)輸出的圖像寬
int pre_y; //預覽通道(P端口模式)輸出的圖像高
int pre_fmt; //使用通道(P端口模式)時設為1
__u16 bypass; //為1時表示不啟用按比例的圖像放大/縮小
__u16 ycbcr; //輸入圖像的YcbCr順序
struct s3c2440_camif *dev; //設備的系統信息
};
上述這些配置信息最終是與一系列的寄存器相關聯的。這個結構為讀/寫寄存器提供了一個清晰的、集中的存儲緩沖。
打開、關閉和控制攝像機的接口函數。這3個接口函數是按V4L規范編寫的,其原型如下:
① 打開攝像機接口函數:
static int v4l_cam_open(struct video_device *v,int mode);
② 控制攝像機接口函數:
static int v4l_cam_ioctl(struct video_device *v,unsigned int cmd,void *arg);
③ 關閉攝像機接口函數:
static void v4l_cam_close(struct video_device *v);
中斷處理接口函數。該中斷處理函數在使用C端口模式完成1幀圖像采集后被調用。函數原型定義如下:
static void s3c2440_camif_isr_c(int irq,void *dev_id,struct pt_regs *regs);
讀取圖像數據的實現函數。該函數通過dev→rdy的值判斷1幀圖像有無采集轉換結束。如果該值置1,則表示采樣結束,這時就可以從圖像數據的緩沖中拷貝數據到用戶的存儲空間;如果為0,則函數進入阻塞或返回EAGAIN標志。順便提一下,dev→rdy的值是在中斷處理函數中設置的。(實現代碼略—— 編者注)
1.3 圖像數據的壓縮
S3C2440的CAMIF接口處理得到的1幀圖像數據比較大,還要經過進一步的壓縮才能適合進行網絡數據傳輸。S3C2440處理器內部沒有提供硬件的圖像壓縮編碼器,但因為它的主頻較高,可以使用軟件來進行圖像壓縮。考慮到CPU的處理能力和對單幀采樣圖像的清晰度有較高的要求,采用基于離散余弦變換算法(DCT)的JPEG/MJPEG方式對圖像數據進行壓縮編碼。
1.4 圖像數據的傳輸
通信單元承擔了圖像的數據傳輸任務。在本系統中,有兩種通信單元可供使用。一種是GPRS/CDMA無線傳輸模塊。它們通過串口與S3C2440處理器相連接,在以太網絡傳輸線纜難以鋪設的環境中可以使用這種通信方式。它的缺點是通信帶寬小,傳輸速度慢,但是如果對實時性要求不高,也能夠傳輸高清晰的靜態圖片。另一種通信單元是10 MHz的CS8900a以太網絡傳輸模塊。它可與局域網相連接,然后將監控圖像發送到局域網的監控服務器或者通過網關發送到互聯網上。這種通信方式速度高,實時性好,但監控現場要安裝有線的以太網絡。
1.5 攝像機云臺的控制
攝像機的云臺控制接口采用RS485通信方式。因S3C2440內部只有RS232的控制器,為此使用MAX485芯片設計了一個RS232到RS485的轉換接口。該電路原理如圖4所示。
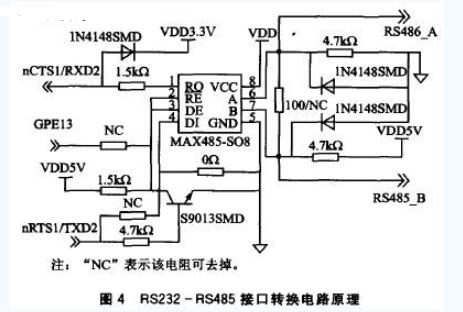
圖4中RS485的數據流方向由GPE13口的電平進行控制。
2 系統軟件的設計
系統軟件包含下位機軟件、服務器軟件和客戶端軟件。下位機軟件部署在遠程圖像監控設備上。這個軟件作為一個Linux的守護進程啟動,負責壓縮采樣到的圖像數據,并把壓縮后的圖像打包,然后通過Socket通信方式上傳到監控服務器。如果使用GPRS/CDMA無線傳輸模塊,上位機軟件在系統啟動完成后,就自動進行PPP撥號,建立起一條TCP/IP的通信管道。客戶端軟件部署在一臺連接到互聯網的PC機上,它提供給最終用戶瀏覽監控畫面,設置監控參數等功能。服務器軟件也部署在一臺連接到互聯網的計算機上。這臺計算機在互聯網上有固定的IP或者域名,服務器軟件作為一個后臺進程啟動,為客戶端和遠程圖像監控設備之間的通信起到一個橋梁的作用。因為遠程監控設備的IP地址是動態的,無法被客戶端直接尋址,因此就需要服務器作為雙方通信的中間橋梁。
下位機軟件通過驅動程序提供的接口,在遠程圖像監控設備中完成硬件的初始化、控制等功能,同時又負責圖像的壓縮和傳輸。它是所有設備的控制中樞,因此這里著重描述下位機軟件的工作流程,如圖5所示。
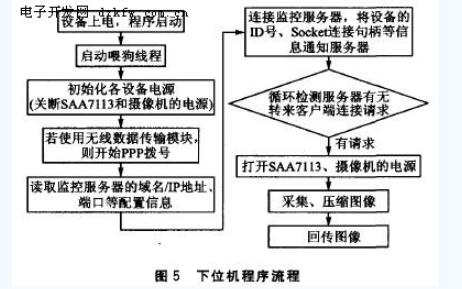
為了省電,一些像SAA7113、攝像機和夜視紅外燈等大功耗的器件和設備只有在需要時才工作,所以這些設備在初始化時都是斷開電源的。
下位機程序讀取保存在設備上的設備ID號(該ID號是唯一的),以及監控服務器的域名/IP地址和端口,然后下位機程序作為Socket連接的客戶端主動與監控服務器進行連接。連接成功之后,送出設備的ID號。這時如果有監控的客戶端想要查看某個遠程監控設備的圖像,只要向監控服務器發出請求,告訴服務器要連接的設備ID號,服務器就會根據這個ID號對應的Socket句柄,為客戶端和遠程監控設備建立一個Socket連接通道。
3 總結
遠程圖像無線監控系統在高壓輸電線路的覆冰監測中得到了成功的應用。在野外全天候環境下,適時準確地監測高壓輸電線路覆冰厚度,同時發出預警處理信息,從而有效地避免了斷纜事故的發生。
遠程圖像監控技術是隨著計算機技術、數字通信技術、網絡技術、自動控制技術以及LSI、VLSI集成電路的發展而發展的,而基于ARM9嵌入式處理器的本系統正是這些技術學科相互交叉和融合發展的集中體現。實踐證明,ARM9處理器的低功耗、高性能和多功能的特性滿足了遠程圖像監控的許多特殊需求,是實現遠程圖像監控的很好選擇。









 工商網監
工商網監
評論