現(xiàn)在做STM32兩輪車(chē)下位機(jī)已基本實(shí)現(xiàn),需要安卓手機(jī)端藍(lán)牙控制其行動(dòng),求教各位大神,給個(gè)源碼看看。
2015-05-28 22:02:27
:主從一體藍(lán)牙模塊(匯承HC-05)車(chē)體構(gòu)成:黑色陽(yáng)極化鈑金底盤(pán)和2塊3mm厚度黑色亞克力帶光柵碼盤(pán)減速電機(jī),輪胎轉(zhuǎn)一圈輸出6280個(gè)脈沖安卓控制程序:實(shí)物圖:兩輪自平衡車(chē)附件包含原理圖、源代碼、APP、視頻
2019-06-03 17:11:43
最近在做兩輪平衡車(chē),網(wǎng)上都有很多成功的兄弟,所以自己來(lái)做,用的是MPU6050(互補(bǔ)濾波),用stm32控制小車(chē),電機(jī)采用的是42步進(jìn)電機(jī)(A4988驅(qū)動(dòng)),結(jié)果在做PID控制時(shí),發(fā)現(xiàn)電機(jī)因?yàn)轭l繁
2019-02-12 06:36:01
最近在弄避障小車(chē),兩輪+一個(gè)萬(wàn)向輪的那種小車(chē)底盤(pán),現(xiàn)在小車(chē)運(yùn)行不能走直線,走著走著就偏了,還有左右轉(zhuǎn)也轉(zhuǎn)得不太好,如何調(diào)整呢,各位指點(diǎn)指點(diǎn)?下面是實(shí)物圖
2016-01-12 14:06:54
兩輪平衡小車(chē)兩輪平衡小車(chē)兩輪平衡小車(chē)兩輪平衡小車(chē)兩輪平衡小車(chē)兩輪平衡小車(chē)兩輪平衡小車(chē)兩輪平衡小車(chē)兩輪平衡小車(chē)兩輪平衡小車(chē)
2014-07-20 21:07:30
兩輪平衡小車(chē)完整資料
2014-07-28 08:54:04
兩輪平衡小車(chē)是用51單片機(jī)好,還是stm32好?
2023-10-08 08:27:06
做一個(gè)兩輪自平衡小車(chē),用陀螺儀怎樣使小車(chē)保持平衡,小車(chē)的重心怎樣測(cè)量
2012-12-04 16:39:35
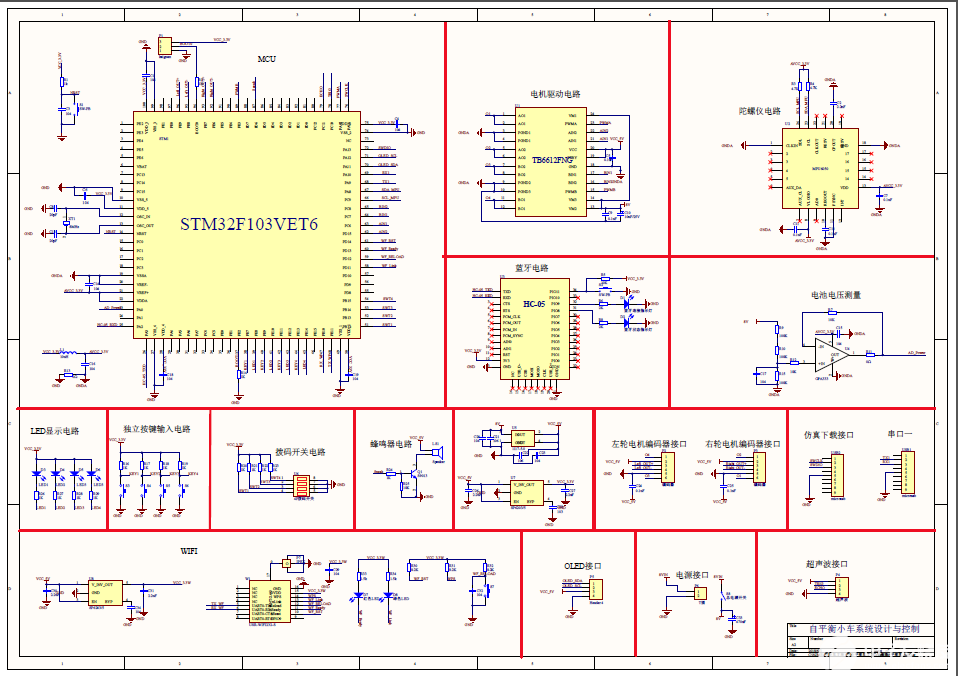
兩輪自平衡小車(chē)一直是近幾年來(lái)畢設(shè),課設(shè)的熱點(diǎn),這回帶來(lái)一片比較優(yōu)秀的設(shè)計(jì),有完整代碼的1.原理圖架構(gòu)大概整理了一下原理圖的結(jié)構(gòu),少了電源部分,電源是電池供電,輸入7.2~8V左右,用兩個(gè)LDO,變成
2022-01-20 07:40:33
本帖最后由 richthoffen 于 2019-7-19 16:40 編輯
兩輪自平衡小車(chē)資料
2019-07-18 12:29:28
兩輪自平衡小車(chē)資料
2020-05-09 09:14:37
兩輪自平衡小車(chē)資料
2020-05-09 09:14:37
主要有兩種:一種是底端固定的,另一種是底端沿著固定的軌道運(yùn)動(dòng),其中大部分在直線軌道上運(yùn)行。兩輪自平衡小車(chē)則是一個(gè)底端可以自由移動(dòng)的三自由度倒立擺系統(tǒng)。增加了控制的難度。安裝在小車(chē)上的傾角計(jì)實(shí)時(shí)地反饋小車(chē)的偏角于控制器,控制器通過(guò)先進(jìn)的控制策略實(shí)時(shí)計(jì)算輸出兩車(chē)輪的力矩來(lái)控制小車(chē)的平衡。
2011-03-07 11:11:36
教你DIY一個(gè)基于stm32的兩輪平衡小車(chē), 主要有幾個(gè)步驟:需求分析——元件選型——原理圖設(shè)計(jì)——PCB設(shè)計(jì)——焊接調(diào)試。有設(shè)計(jì)過(guò)的壇友可以一起交流,我會(huì)逐步分享
2019-08-19 09:54:39
申請(qǐng)理由:資深電子愛(ài)好者,設(shè)計(jì)過(guò)循跡、蔽障、WIFI視頻小車(chē),參加過(guò)robocup機(jī)器人大賽,一直想做一輛兩輪平衡車(chē),現(xiàn)在用飛思卡爾的MC9SXS128MAL設(shè)計(jì)出一款平衡車(chē),想借此機(jī)會(huì)申請(qǐng)一塊
2015-11-24 09:32:05
申請(qǐng)理由:申請(qǐng)F(tuán)ireBLE做兩輪平衡車(chē)實(shí)驗(yàn)。項(xiàng)目描述:開(kāi)發(fā)項(xiàng)目:兩輪平衡車(chē)開(kāi)發(fā)方案:FireBLE集成了Cortex-M0,MPU6050,藍(lán)牙4.0,剛好做平衡車(chē)可以省去三大部
2015-07-19 15:28:44
、利用MPU6050測(cè)定角速度;4、通過(guò)手機(jī)藍(lán)牙來(lái)控制小車(chē)的前進(jìn)、后退、向左、向右,打開(kāi)重力感應(yīng)模式,通過(guò)手機(jī)角度的變化,來(lái)控制小車(chē)。項(xiàng)目原理:兩輪自平衡小車(chē),兩輪著地,依靠兩輪的前進(jìn)或者后退保持車(chē)體平衡
2015-07-30 09:33:17
經(jīng)過(guò)一段時(shí)間的努力,自平衡小可以站起來(lái)了,但是這站立比較曲折,先是用FireBLE自身來(lái)處理姿態(tài)數(shù)據(jù),然后控制TB6612FNG驅(qū)動(dòng)電現(xiàn),但是沒(méi)有成功,后來(lái)轉(zhuǎn)用兩個(gè)處理器來(lái)控制,F(xiàn)ireBLE只用
2015-09-22 09:29:13
本帖最后由 將軍問(wèn)鼎 于 2016-8-20 23:06 編輯
收到板子有一段時(shí)間了,近幾日一直在研究兩輪平衡車(chē),廢話少說(shuō),先展示我的一張產(chǎn)品圖,接著我在給大家細(xì)細(xì)介紹:先看一下結(jié)構(gòu)下部是兩
2016-08-20 18:34:27
申請(qǐng)理由:我是廣西機(jī)電職業(yè)技術(shù)學(xué)院應(yīng)用電子專(zhuān)業(yè)學(xué)生,現(xiàn)在也在做嵌入式的開(kāi)發(fā)和學(xué)習(xí),想利用業(yè)余時(shí)間設(shè)計(jì)智能平衡兩輪小車(chē),同時(shí)加深學(xué)習(xí)嵌入式的開(kāi)發(fā)技術(shù)。項(xiàng)目描述:我們團(tuán)隊(duì)打算設(shè)計(jì)的智能小車(chē)預(yù)想的功能主要有:自動(dòng)平衡及語(yǔ)音提示、、語(yǔ)音控制、循跡、自動(dòng)避開(kāi)障礙物、能超聲波測(cè)距等功能
2015-07-17 08:56:14
測(cè)定角速度;4、通過(guò)WiFi來(lái)控制小車(chē)的前進(jìn)、后退、向左、向右。項(xiàng)目原理:兩輪自平衡小車(chē),兩輪著地,依靠兩輪的前進(jìn)或者后退保持車(chē)體平衡。從控制角度看,小車(chē)作為一個(gè)控制對(duì)象,它的輸入量是兩個(gè)電機(jī)的轉(zhuǎn)動(dòng)
2015-08-12 14:43:37
自平衡小車(chē)。代號(hào)MWbalancedSTC15的命名遵循“MW+xxx”的方式,MW為大寫(xiě),是Miaow的縮寫(xiě),balanced為小寫(xiě),意為“平衡的”,STC15為系統(tǒng)所用的控制芯片型號(hào)。兩輪自平衡
2016-02-24 10:31:17
這個(gè)是去年做的一個(gè)兩輪自平衡循跡小車(chē),小車(chē)采用兩片STM32,一塊負(fù)責(zé)圖像處理,另一塊負(fù)責(zé)對(duì)電機(jī)的控制。兩塊板子之間使用串口通信傳輸數(shù)據(jù)。做這個(gè)車(chē)子學(xué)會(huì)了很多,最初兩塊板子之間串口通信有問(wèn)題,程序會(huì)跑著跑著就跑飛,很是惱火。之后每次需要串口通信才打開(kāi)中斷,解決了跑飛的問(wèn)題。以下是車(chē)子的圖片,和源碼。
2015-09-10 08:59:28
直立智能車(chē)設(shè)計(jì)摘 要隨著微電子控制技術(shù)的發(fā)展和人們對(duì)出行工具的日益增長(zhǎng)的需求,一款簡(jiǎn)單易操作、容易攜帶、清潔無(wú)污染的兩輪自平衡車(chē)開(kāi)始走進(jìn)大眾的視野,但這種小型代步工具仍可能存在一定的不穩(wěn)定性
2021-08-06 08:59:50
系統(tǒng)基本框架,實(shí)現(xiàn)對(duì)車(chē)身信息的采集。驅(qū)動(dòng)直流電機(jī),實(shí)現(xiàn)車(chē)體的平衡控制。二、項(xiàng)目設(shè)計(jì) 二輪平衡小車(chē)采用直流電機(jī)驅(qū)動(dòng)方式,依靠陀螺儀和角加速度傳感器采集平衡信息
2013-11-16 00:18:41
學(xué)習(xí)一種單片機(jī)最快的方式莫過(guò)于用它實(shí)際制作一個(gè)作品了,前些天看到有人在玩平衡小車(chē),感覺(jué)非常有趣,于是就決定自己動(dòng)手制作一個(gè)基于stm32的兩輪平衡小車(chē)。從電路板設(shè)計(jì),到程序編寫(xiě),一步一步的,希望自己
2020-09-01 14:50:37
使用MSP制作兩輪自平衡車(chē)基本原理:該系統(tǒng)以MSP-EXP432P401R為主控板,采用MPU6050采集小車(chē)的姿態(tài)。然后通過(guò)卡爾曼濾對(duì)數(shù)據(jù)進(jìn)行融合處理,最后利用PID控制算法計(jì)算電機(jī)的PWM值以
2015-05-10 07:01:09
平衡小車(chē)---2.底盤(pán)電池模塊的組裝改裝刀俠DIY洞洞板stm32兩輪平衡小車(chē)---3.原理圖和模擬走線刀俠DIY洞洞板stm32兩輪平衡小車(chē)---4.控制板焊接刀俠DIY洞洞板stm32兩輪平衡小車(chē)
2016-03-15 09:56:10
俠DIY洞洞板stm32兩輪平衡小車(chē)之2.底盤(pán)電池模塊的組裝改裝下期鏈接:刀俠DIY洞洞板stm32兩輪平衡小車(chē)---3.原理圖和模擬走線刀俠DIY洞洞板stm32兩輪平衡小車(chē)---4.控制板焊接刀俠
2016-03-16 13:11:20
的組裝改裝本期名稱(chēng): 刀俠DIY洞洞板stm32兩輪平衡小車(chē)---3.原理圖和模擬走線下期鏈接:刀俠DIY洞洞板stm32兩輪平衡小車(chē)---4.控制板焊接刀俠DIY洞洞板stm32兩輪平衡小車(chē)
2016-03-18 14:45:00
平衡小車(chē)---3.原理圖和模擬走線本期名稱(chēng):刀俠DIY洞洞板stm32兩輪平衡小車(chē)---4.控制板焊接下期鏈接:刀俠DIY洞洞板stm32兩輪平衡小車(chē)---5.APP軟件Bluetooth RC
2016-03-19 18:13:54
物料工具準(zhǔn)備刀俠DIY洞洞板stm32兩輪平衡小車(chē)---2.底盤(pán)電池模塊的組裝改裝刀俠DIY洞洞板stm32兩輪平衡小車(chē)---3.原理圖和模擬走線刀俠DIY洞洞板stm32兩輪平衡小車(chē)---4.控制
2016-03-21 21:29:28
stm32兩輪平衡小車(chē)---2.底盤(pán)電池模塊的組裝改裝刀俠DIY洞洞板stm32兩輪平衡小車(chē)---3.原理圖和模擬走線刀俠DIY洞洞板stm32兩輪平衡小車(chē)---4.控制板焊接刀俠DIY洞洞板stm32
2016-04-01 07:47:15
stm32兩輪平衡小車(chē)---1.物料工具準(zhǔn)備刀俠DIY洞洞板stm32兩輪平衡小車(chē)---2.底盤(pán)電池模塊的組裝改裝刀俠DIY洞洞板stm32兩輪平衡小車(chē)---3.原理圖和模擬走線刀俠DIY洞洞板
2016-04-12 17:30:21
``主題:零基礎(chǔ)制作兩輪自平衡小車(chē)主講人:宋一標(biāo):喵嗚實(shí)驗(yàn)室創(chuàng)建者,五邑大學(xué)信息工程學(xué)院本科畢業(yè),曾獲第七屆全國(guó)大學(xué)生“飛思卡爾”杯智能汽車(chē)競(jìng)賽華南區(qū)三等獎(jiǎng),曾工作于CVTE,追求極致,熱愛(ài)技術(shù)
2016-02-24 11:57:06
喵嗚實(shí)驗(yàn)室【兩輪自平衡小車(chē)】開(kāi)源項(xiàng)目官網(wǎng):miaowlabs.com快!扶我起來(lái)看超清無(wú)碼的角度環(huán)PD調(diào)試指南來(lái)!再扶我起來(lái)看超清無(wú)碼的速度環(huán)PI調(diào)試指南
2016-04-12 10:45:36
` 本帖最后由 youzizhile 于 2015-9-17 23:28 編輯
今天上午看到兩輪自平衡車(chē)的開(kāi)發(fā)套件活動(dòng),很興奮,一直想做這樣的東西。之前在電子市場(chǎng)買(mǎi)了開(kāi)發(fā)四軸的電機(jī)和扇葉,還有
2015-04-29 15:46:49
本帖最后由 Stark揚(yáng) 于 2018-10-19 16:26 編輯
基于STM32打造的兩輪直立自平衡小車(chē)帶硬件和軟件資料畢設(shè)的資料——STM32兩輪自平衡小車(chē)系統(tǒng),完整資料分享出來(lái),給需要
2018-10-18 18:03:10
融合;4、采用PID算法實(shí)現(xiàn)小車(chē)兩輪自平衡;5、使用 TB6612電機(jī)驅(qū)動(dòng)模塊實(shí)現(xiàn)小車(chē)的驅(qū)動(dòng)電機(jī),綜合實(shí)現(xiàn)小車(chē)的直立行走。零、目的與意
2021-11-30 08:03:37
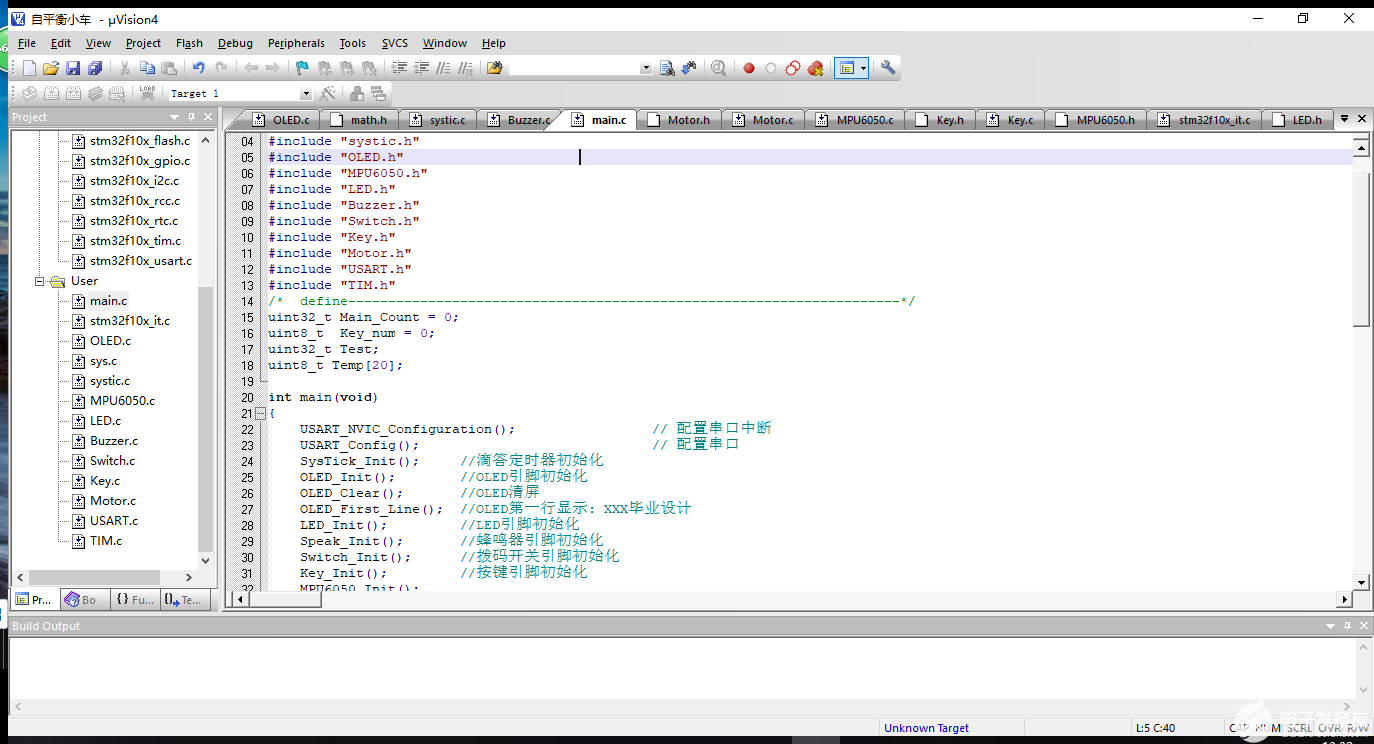
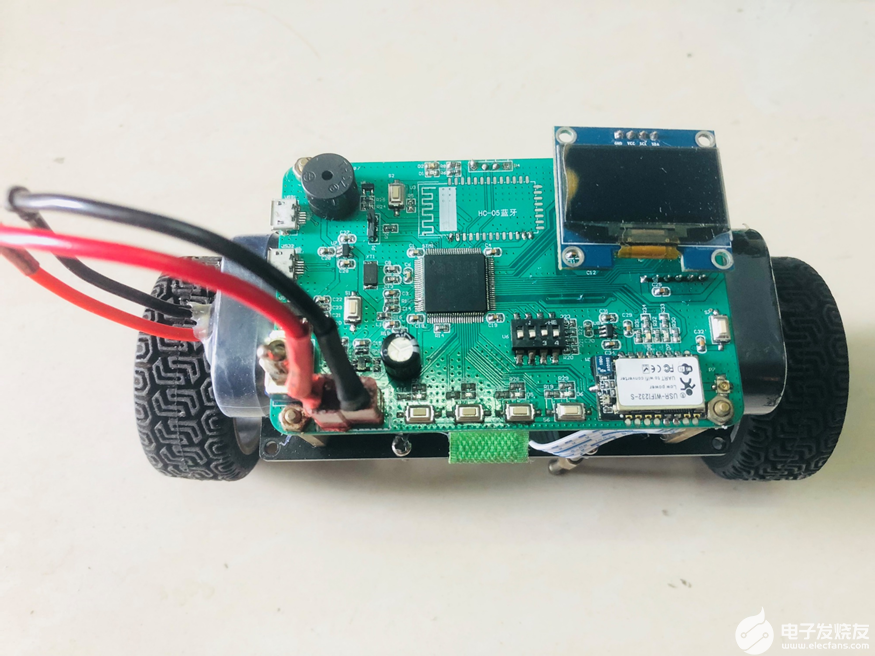
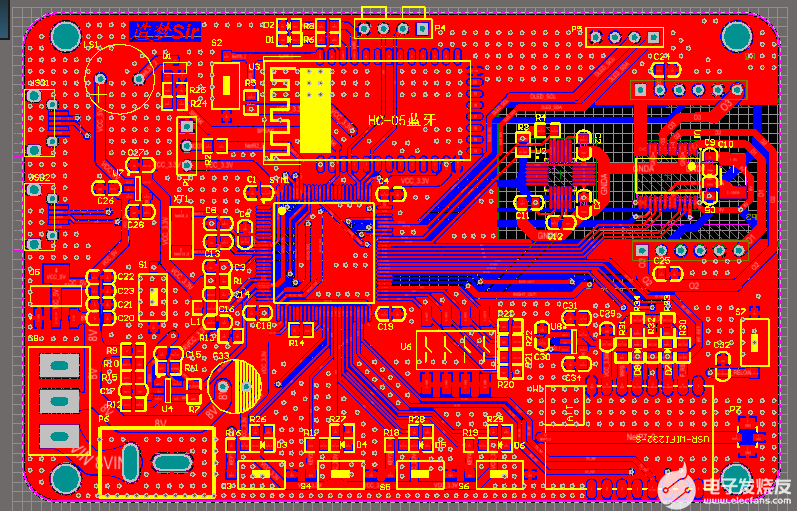
基于stm32的兩輪自平衡小車(chē),主控芯片用的是100腳的STM32F103VET6,陀螺儀用的是MPU6050,電機(jī)驅(qū)動(dòng)用的是TB6612,藍(lán)牙是匯承的HC05郵票孔封裝的,WIFI用的是濟(jì)南有人科技的USR-WIFI232-S,小車(chē)底盤(pán)用的是平衡小車(chē)之家的某一款帶編碼器的(不是我買(mǎi)的,同學(xué)的),電池用...
2021-07-27 06:17:26
最近辭職在家,想學(xué)點(diǎn)東西,看了視頻教程,覺(jué)得枯燥無(wú)聊,想著是嵌入式方向的,怎么也要會(huì)一些項(xiàng)目吧,便準(zhǔn)備開(kāi)始著手做一些項(xiàng)目,就先從stm32的兩輪自平衡小車(chē)開(kāi)始入手吧。以下物料都是自己采購(gòu)的。主控板
2021-08-09 06:48:42
一段時(shí)間學(xué)習(xí)和研究,最終還是完成了。板子焊接好后經(jīng)過(guò)調(diào)試成功的實(shí)現(xiàn)了載人的功能。話不多說(shuō)上圖:實(shí)驗(yàn)室:AD10畫(huà)圖:焊板;試騎 再發(fā)幾張其他的:我的畢業(yè)設(shè)計(jì)課題:基于視覺(jué)的巡線小車(chē)控制系統(tǒng)設(shè)計(jì)CCD攝像頭兩輪平衡小車(chē)我們學(xué)校的方程式賽車(chē)
2016-07-23 23:32:50
智能車(chē)種類(lèi)眾多,其中兩輪平衡車(chē)特別受到了工程師的喜愛(ài),整理了8個(gè)兩輪平衡車(chē)的資料,一起看看這個(gè)小可愛(ài)吧。1、基于ARM-STM32的兩輪自平衡小車(chē)小車(chē)直立和方向控制任務(wù)都是直接通過(guò)控制小車(chē)兩個(gè)電機(jī)
2021-11-30 08:15:36
以ADSP為系統(tǒng)核心實(shí)現(xiàn)的兩輪自平衡動(dòng)作模仿小車(chē),主要由自平衡模塊與控制模塊構(gòu)成。自平衡模塊采用卡爾曼濾波算法對(duì)傳感器測(cè)得的角度值和角速度值進(jìn)行數(shù)據(jù)融合后求出精確的角度值,再利用PID控制實(shí)現(xiàn)倒立
2014-11-03 17:12:35
今天開(kāi)貼貼,制作基于MSP430的兩輪平衡車(chē)。希望各路大神多多指教,提出問(wèn)題!大家一起學(xué)習(xí),提高。(預(yù)計(jì)是三個(gè)月內(nèi),完成前每一周至少一個(gè)技術(shù)貼),陸續(xù)會(huì)把開(kāi)發(fā)過(guò)程,軟硬件開(kāi)源,并附上各階段開(kāi)發(fā)圖片,
2015-05-08 16:31:12
的站立式為坐式兩輪自平衡車(chē),使得做起來(lái)更加的舒適,更加易于控制。通過(guò)使用陀螺、加速度計(jì)來(lái)測(cè)姿、測(cè)速等,采用模糊控制來(lái)控制小車(chē),實(shí)現(xiàn)小車(chē)的平衡。 技術(shù)關(guān)鍵:①測(cè)量小車(chē)的姿態(tài)、速度等。②使用處理芯片對(duì)姿態(tài)
2013-11-01 13:51:26
如何利用STM32去實(shí)現(xiàn)一種兩輪自平衡車(chē)呢?
2021-12-20 07:44:28
如何去制作一種基于stm32的兩輪平衡小車(chē)?基于stm32的兩輪平衡小車(chē)電路設(shè)計(jì)的基本過(guò)程是怎樣的?
2021-07-09 07:47:07
寒假無(wú)所事事,決定做一個(gè)兩輪平衡車(chē)來(lái)玩玩.個(gè)人覺(jué)得兩輪自平衡車(chē)是集合所有算法的精髓.它就像蛋炒飯,最簡(jiǎn)單也是最困難.他可以用簡(jiǎn)單的算法實(shí)現(xiàn),當(dāng)然也可以用最復(fù)雜的控制理論來(lái)實(shí)現(xiàn). 本質(zhì)上來(lái)說(shuō)它就是個(gè)
2021-07-13 07:24:30
現(xiàn)在有GY521模塊,有只能小車(chē)的基礎(chǔ)配件,現(xiàn)在想做兩輪平衡小車(chē),但是對(duì)于GY521模塊輸出的數(shù)據(jù),濾波算法都不太懂,還有調(diào)節(jié)的方法只知道大概,網(wǎng)上的資料都是大體說(shuō)說(shuō),希望大神分享一些做平衡小車(chē)細(xì)致點(diǎn)的資料,問(wèn)一下GY521輸出的信號(hào)是什么,有這個(gè)模塊還用不用卡爾曼濾波
2019-01-11 10:37:58
怎么實(shí)現(xiàn)基于STM32兩輪自平衡小車(chē)的設(shè)計(jì)?
2021-10-11 09:37:12
怎么實(shí)現(xiàn)基于STM32的二輪自平衡小車(chē)的制作?
2021-11-15 07:55:50
兩輪平衡小車(chē)是由哪些模塊組成的?怎樣去設(shè)計(jì)一種基于stm32的兩輪平衡小車(chē)?
2021-09-28 06:26:18
基于stm32的兩輪自平衡小車(chē)是由哪些模塊組成的?怎樣去設(shè)計(jì)一種基于stm32的兩輪自平衡小車(chē)呢?
2022-03-01 06:31:44
怎樣去設(shè)計(jì)一種基于AVR單片機(jī)的兩輪自平衡智能車(chē)?如何對(duì)其進(jìn)行測(cè)速?
2021-09-24 07:12:25
PAGE I自平衡小車(chē)設(shè)計(jì)摘要這些年來(lái),兩輪自平衡車(chē)的應(yīng)用獲得了十分快速的應(yīng)用和發(fā)展。本文提出了一種兩輪的自平衡小車(chē)的設(shè)計(jì),采用陀螺儀ENC-03以及MEMS加速度傳感器MMA7260構(gòu)成小車(chē)姿態(tài)
2021-08-23 06:32:41
畢設(shè)分享:STM32兩輪自平衡小車(chē)系統(tǒng)設(shè)計(jì)與控制 含源碼、原理圖及PCB文件
2021-07-27 07:20:05
此篇為硬件篇,接上一篇“基于stm32的兩輪自平衡小車(chē)2(原理篇)”。包含自行設(shè)計(jì)電路板原理圖與PCB電路圖的過(guò)程。詳見(jiàn)目錄。目錄stm32管腳分配硬件原理圖PCB電路圖最后效果圖stm32管腳分配
2021-08-11 07:20:11
怎樣通過(guò)手機(jī)藍(lán)牙APP去控制兩輪自平衡車(chē)呢?怎樣去設(shè)計(jì)一種兩輪自平衡車(chē)的軟硬件呢?
2021-11-11 06:21:03
我的兩輪平衡小車(chē)之路(基于STM32的腦洞大開(kāi)設(shè)計(jì))https://bbs.elecfans.com/jishu_481497_1_1.html@wqqq 基于MSP430的兩輪自平衡小車(chē)的設(shè)計(jì)和制作
2015-04-28 23:40:49
。整個(gè)過(guò)程的開(kāi)發(fā)資料會(huì)全部開(kāi)源,同時(shí)在過(guò)程中會(huì)同步更新部分干貨,不喜求輕噴。實(shí)現(xiàn)基本功能(兩輪小車(chē)自平衡)外,還附帶一些“浮夸”點(diǎn)的技能,喜歡的朋友可以后續(xù)關(guān)注一下。最后PS一下,所有開(kāi)源資源僅限學(xué)習(xí)交流,禁止進(jìn)行商用,本人保留所有追究權(quán)利。
2015-05-09 10:33:01
~原理圖沒(méi)什么難的,最小系統(tǒng)+電機(jī)控制+電機(jī)電源繪制時(shí)細(xì)心加耐心就沒(méi)什么問(wèn)題,不然就會(huì)和我畫(huà)第一版時(shí)一樣吧tx和rx給畫(huà)反了...PCB圖:各位大神看見(jiàn)我這凌亂的布線就不要吐槽了,畢竟不是電子專(zhuān)業(yè)出身,這些
2016-12-11 01:02:50
畢設(shè)的資料一STM32兩輪自 平衡小車(chē)系統(tǒng),完整資料分享出來(lái),給需要的人。硬件資源:主控芯片用的是100腳的STM32F103VET6,陀螺儀用的是MPU6050,電機(jī)驅(qū)動(dòng)用的是TB6612,藍(lán)牙
2019-03-19 14:43:28
求兩輪自平衡小車(chē)的資料,最好是與元件清單和電路圖源碼等等,自己想做一個(gè)玩玩,最好是51或者avr的也不要太貴了,個(gè)人是學(xué)生,可能承受不起,主要是學(xué)習(xí)用的,有這方面資料的大神,發(fā)一下給我,或者留下聯(lián)系方式,我的郵箱是1083552109@qq.com。有大神能夠指導(dǎo)我那就更好了
2013-12-24 17:35:00
求兩輪自平衡小車(chē)資料,本人做畢業(yè)設(shè)計(jì)。謝謝了。
2013-12-31 21:27:17
求兩輪自平衡小車(chē)資料 畢業(yè)設(shè)計(jì)用。謝謝。
2014-01-01 12:27:12
最近想弄個(gè)自平衡小車(chē)試試,便在網(wǎng)上買(mǎi)了個(gè)ADX345加速度計(jì)和L3G4200三軸陀螺儀傳感器模塊,根據(jù)數(shù)據(jù)手冊(cè)可以輸出他們的X、Y、Z的值,但接下來(lái)該怎么做,網(wǎng)上看了很多,但沒(méi)頭緒,跪求大神指導(dǎo)指導(dǎo)。
2013-11-15 15:59:58
)開(kāi)發(fā)板。本樣例效果動(dòng)圖:硬件配置資源兩輪平衡小車(chē)主要硬件資源:主控CPU:小熊派BearPi-HM Nano(Hi3861)開(kāi)發(fā)板;陀螺儀:MPU6050六軸陀螺儀傳感器;左右輪:帶有霍爾傳感器
2022-12-16 12:03:36
`主題:零基礎(chǔ)制作兩輪自平衡小車(chē)主講內(nèi)容:器件選型;原理圖講解;自平衡原理;濾波算法講解;調(diào)試經(jīng)驗(yàn)分享;課件資料:(回復(fù)可見(jiàn))[hide][/hide]`
2016-04-28 11:33:36
參照飛思卡爾智能車(chē)的方案,diy了一臺(tái)兩輪自平衡小車(chē),小車(chē)上電后能停在一點(diǎn)不動(dòng),收到干擾可以自動(dòng)平衡。另外我發(fā)現(xiàn),配合速度環(huán),即使重心不在小車(chē)中心,小車(chē)也能自己調(diào)整角度,達(dá)到重心平衡使用的材料
2014-04-19 12:39:37
研究兩輪自平衡電動(dòng)車(chē)有什么意義?怎樣去設(shè)計(jì)兩輪自平衡自動(dòng)車(chē)系統(tǒng)?設(shè)計(jì)兩輪自平衡自動(dòng)車(chē)有哪些步驟程序?兩輪自平衡電動(dòng)車(chē)有什么優(yōu)點(diǎn)?
2021-04-19 11:13:11
大神們,求一份兩輪平衡小車(chē)資料啊。主控芯片是STM32F103C8T6的。拜托大家了
2019-02-24 22:57:58
最近想做個(gè)兩輪自平衡小車(chē),有大神做過(guò)的嗎?能給點(diǎn)建議唄比如電機(jī)的選取需要的模塊需要提前了解的知識(shí),原理等等不勝感激
2018-09-21 09:29:15
給大家分享個(gè)兩輪平衡小車(chē)設(shè)計(jì),不多說(shuō)了,直接上圖 附件資料
2016-06-07 16:32:18
` 本帖最后由 fwlive 于 2015-5-13 09:53 編輯
基本材料:1.FRDM-KL25Z開(kāi)發(fā)板2.兩輪自平衡小車(chē)底盤(pán)總成3.陀螺儀4.Wifi模塊5. 亞克力外殼6. 無(wú)線
2015-05-12 16:25:50
兩輪自平衡小車(chē)的設(shè)計(jì)與實(shí)現(xiàn),基于STM32控制的自平衡雙輪小車(chē),其中機(jī)械部分包括車(chē)體、車(chē)輪、步進(jìn)電機(jī)、鋰電池等部件設(shè)計(jì)加工。
2016-05-19 15:16:15 20
20 基于滑膜干擾抑制的兩輪小車(chē)自平衡控制算法_陳運(yùn)勝
2017-01-31 15:22:443 本文主要對(duì)基于STM32和MPU-6050的兩輪自平衡小車(chē)系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)進(jìn)行了分析,采用高性能STM32F103C8T6作為主控制器,采用卡爾曼濾波算法和雙閉環(huán)PID控制算法對(duì)小車(chē)進(jìn)行自平衡控制。提高了數(shù)據(jù)采集和控制的實(shí)時(shí)性,提高了系統(tǒng)的穩(wěn)定性和抗干擾能力。
2017-12-23 16:36:40 29636
29636 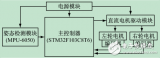
基于STM32的兩輪平衡小車(chē)源代碼說(shuō)明。
2021-03-17 14:21:0762 本文檔的主要內(nèi)容詳細(xì)介紹的是使用PID設(shè)計(jì)兩輪智能平衡小車(chē)的資料合集包括了:原理圖PCB程序源碼BOM等
2021-03-24 09:12:3434 畢設(shè)分享:STM32兩輪自平衡小車(chē)系統(tǒng)設(shè)計(jì)與控制 含源碼、原理圖及PCB文件
2021-11-23 18:07:0488 自動(dòng)補(bǔ)全代碼格式化軟件及資料總結(jié)兩輪自平衡小車(chē)學(xué)習(xí)筆記1開(kāi)始學(xué)習(xí)基于STM32CubeMX和Keil-MDK的兩輪自平衡小車(chē),之前做物理科技創(chuàng)新競(jìng)賽中有用到STM32系列,所以還是比較熟悉,但是之前做項(xiàng)目都是直接對(duì)用相關(guān)的硬件例程進(jìn)行修改,沒(méi)有系統(tǒng)的教學(xué)過(guò),也沒(méi)有用到STM32CubeMX這個(gè)軟
2021-12-01 16:36:0611 學(xué)習(xí)一種單片機(jī)最快的方式莫過(guò)于用它實(shí)際制作一個(gè)作品了,前些天看到有人在玩平衡小車(chē),感覺(jué)非常有趣,于是就決定自己動(dòng)手制作一個(gè)基于stm32的兩輪平衡小車(chē)。從電路板設(shè)計(jì),到程序編寫(xiě),一步一步的,希望自己在這個(gè)過(guò)程中有一定的收獲。
2023-07-25 15:48:311454 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論