工程公司 Melexis 今日宣布推出面向繼電器控制直流電機(jī)應(yīng)用的全新 LIN 預(yù)驅(qū)動(dòng)芯片 MLX81160。該芯片是Melexis第三代兼容性嵌入式電機(jī)驅(qū)動(dòng)芯片系列的最新成員,兼具功率高、設(shè)計(jì)緊湊
2022-10-21 13:46:28 1003
1003 
大家好。請(qǐng)問有人知道微型伺服電機(jī)(雙通道的增量式光電編碼器)一般用什么芯片驅(qū)動(dòng)嗎?主控芯片用stm32
2017-11-02 12:21:19
編碼器原理是什么?
2021-12-21 08:05:38
編碼器怎么用?
2021-10-15 07:45:37
的問題。圖2表2▲ 優(yōu)先編碼器上述機(jī)械式按鍵編碼電路雖然比較簡(jiǎn)單,但當(dāng)同時(shí)按下兩個(gè)或更多個(gè)鍵時(shí),其輸出將是混亂的。在數(shù)字系統(tǒng)中,特別是在計(jì)算機(jī)系統(tǒng)中,常常要控制幾個(gè)工作對(duì)象,例如微型計(jì)算機(jī)主機(jī)要控制打印機(jī)
2019-10-13 08:00:00
編碼器接口模式是什么?編碼器配置源碼的配置過程是怎樣的?
2021-11-23 06:03:51
編碼器的原理是什么?編碼器可分為哪幾類?編碼器是如何進(jìn)行接線的?編碼器軟件四倍頻技術(shù)是什么?
2021-08-04 06:08:39
編碼器是什么?編碼器工作原理是什么?
2021-10-19 09:59:08
編碼器是什么?編碼器主要分為哪幾種?編碼器測(cè)速的大致原理是什么?
2021-06-30 07:48:39
的應(yīng)用 增量型編碼器與絕對(duì)型編碼器區(qū)別 1、角度測(cè)量 汽車駕駛模擬器,對(duì)方向盤旋轉(zhuǎn)角度的測(cè)量選用光電編碼器作為傳感器。重力測(cè)量?jī)x,采用光電編碼器,把他的轉(zhuǎn)軸與重力測(cè)量?jī)x中補(bǔ)償旋鈕軸相連,扭轉(zhuǎn)角度儀,利用
2017-11-24 19:00:47
的刻孔方式不同分類(1)增量型:就是每轉(zhuǎn)過單位的角度就發(fā)出一個(gè)脈沖信號(hào)(也有發(fā)正余弦信號(hào),編碼器(圖1)然后對(duì)其進(jìn)行細(xì)分,斬波出頻率更高的脈沖),通常為A相、B相、Z...
2021-07-12 06:39:50
編碼器的工作原理是什么?如何通過波形得出正反轉(zhuǎn)的判據(jù)呢?編碼器的程序結(jié)構(gòu)如何實(shí)現(xiàn)?
2021-10-14 06:36:49
伺服電機(jī)的種類有哪些?伺服電機(jī)主要的作用是什么?編碼器的結(jié)構(gòu)域工作原理是什么?編碼器的分類和特點(diǎn)有哪些?伺服電機(jī)與編碼器的工作是什么?
2021-06-28 08:11:44
編碼器零點(diǎn)電角度偏移量同步電機(jī)的控制,轉(zhuǎn)子的位置是必要的反饋。電機(jī)的磁極的換向,控制的是電角度。編碼器的安裝和電角度,存在誤差。機(jī)械角度的反饋,在多極對(duì)數(shù)時(shí),需要做一個(gè)電角度的轉(zhuǎn)換,進(jìn)入控制的轉(zhuǎn)子
2021-09-03 06:08:34
為什么在使用同步機(jī)做自整定的時(shí)候,整定的角度有時(shí)候偏差會(huì)比較大,會(huì)出現(xiàn)飛車現(xiàn)象。而更改編碼器后可以正常整定。請(qǐng)問編碼器什么情況下會(huì)導(dǎo)致這樣的問題。另外,斷電測(cè)試時(shí)候,編碼器會(huì)損壞的原因有哪些?(電源穩(wěn)定)
2018-09-07 14:40:40
AS5040 是一款無接觸式磁旋轉(zhuǎn)編碼器,在單個(gè)封裝內(nèi)整合了集成式 Hall 元件、模擬前端和數(shù)據(jù)信號(hào)處理功能。使用時(shí)必須結(jié)合一塊圓柱形雙極磁鐵推薦時(shí)直徑6cm高2cm。磁鐵的安裝需要對(duì)準(zhǔn)當(dāng)磁鐵
2022-01-07 06:44:48
空心軸增量式編碼器 軸增量式編碼器輪轂軸增量式編碼器無軸承增量式編碼器套件/模塊化增量式編碼器光學(xué)增量式編碼器磁增量式編碼器危險(xiǎn)等級(jí)遞增編碼器軸絕對(duì)編碼器輪轂軸絕對(duì)編碼器空心軸絕對(duì)編碼器光學(xué)絕對(duì)編碼器磁絕對(duì)編碼器微型旋轉(zhuǎn)編碼器非接觸式旋轉(zhuǎn)編碼器
2020-07-17 09:54:48
FOC電機(jī)驅(qū)動(dòng)磁編碼器怎么校準(zhǔn)?磁編碼器受影響,出來的角度變得非線性了,要怎么做?
2016-01-19 10:50:51
Piher公司推出一款能以360°旋轉(zhuǎn)角度提供反饋的旋轉(zhuǎn)傳感器/控制器。 這種表面貼裝A-15器件還能采用無限旋轉(zhuǎn)、過孔和水平調(diào)節(jié)安裝方式,其工作溫度范圍在-40℃到+120℃之間,機(jī)械
2018-10-26 16:41:31
為什么要用編碼器?STM32編碼器的原理是什么?
2021-11-24 07:32:10
奧地利微電子發(fā)布了一款磁線性運(yùn)動(dòng)編碼器 IC AS5305,該產(chǎn)品專為包括工業(yè)驅(qū)動(dòng)、X -Y 平臺(tái)或電機(jī)等應(yīng)用在內(nèi)的線性運(yùn)動(dòng)和離軸旋轉(zhuǎn)測(cè)量而設(shè)計(jì)。汽車版本AS5305A適用于節(jié)氣門、凸輪和曲
2009-01-17 13:55:37
stm32怎么控制編碼器,讓編碼器記錄電機(jī)的轉(zhuǎn)數(shù)?
2014-02-25 19:48:17
通常情況下編碼器與轉(zhuǎn)子同軸連接后,由于其安裝的任意性,絕對(duì)位置信號(hào)、參考信號(hào)與轉(zhuǎn)子位置的初始關(guān)系是隨機(jī)且未知的,即正弦形絕對(duì)位置信號(hào)與轉(zhuǎn)子機(jī)械角度之間存在一個(gè)初相角。因此,在編碼器安裝完成后,必須
2021-08-27 06:27:11
為什么要用電機(jī)驅(qū)動(dòng)?TB6612電機(jī)驅(qū)動(dòng)怎么實(shí)現(xiàn)?為什么要用電機(jī)編碼器?電機(jī)編碼器怎么使用?
2021-10-20 07:36:53
目錄說明一、硬件介紹1.1、硬件準(zhǔn)備1.1.1、SimpleMotor方案?說明??本節(jié)比較簡(jiǎn)單,主要是演示I2C接口和SPI接口讀取編碼器角度。為增加大家對(duì)編碼器的理解,本節(jié)后半部提供四種常用
2022-02-14 07:19:42
什么是脈沖當(dāng)量?伺服電機(jī)和編碼器有什么關(guān)系?伺服電機(jī)自帶編碼器為什么還要外加編碼器?
2021-11-01 06:20:22
01 伺服輪轂傳感器(編碼器) 編碼器(encoder)可提供位置、角度和轉(zhuǎn)速等信息。分辨率由每圈的線數(shù)或脈沖數(shù)量決定,每轉(zhuǎn)一圈,編碼器將其傳遞給控制器。控制器通過計(jì)算脈沖數(shù)量確定當(dāng)前位置。輪轂有了
2020-09-23 16:57:45
編碼器的原理是什么?電機(jī)編碼器是如何進(jìn)行接線的?編碼器接口的配置方式有哪些?使用編碼器時(shí)有哪些注意事項(xiàng)?
2021-08-02 10:21:23
光柵編碼器可分為兩大類,一是旋轉(zhuǎn)編碼器,用于轉(zhuǎn)角、轉(zhuǎn)速的測(cè)量;二是直尺型編碼器,用于直線位移、運(yùn)動(dòng)速度的測(cè)量。在旋轉(zhuǎn)編碼器中,又可分為絕對(duì)式編碼器和增量式編碼器。
2019-10-18 09:03:30
最近想測(cè)電機(jī)轉(zhuǎn)動(dòng)的角度,第一想到了絕對(duì)式編碼器。。但是沒用過,所以不懂那款絕對(duì)式編碼器可以跟51單片機(jī)連接到一起使用。。求做過或者有經(jīng)驗(yàn)的大神給個(gè)用過的例子參考下。或者給個(gè)建議,我該選用什么型號(hào),什么樣子的編碼器。。。該怎么測(cè)側(cè)角度。。
2016-12-30 20:12:21
關(guān)于帶AB相編碼器直流減速電機(jī)測(cè)轉(zhuǎn)動(dòng)速度及角度的知識(shí)點(diǎn)不看肯定后悔
2021-09-18 08:04:13
增量式編碼器工作原理是什么?增量式編碼器的結(jié)構(gòu)是由哪些部分組成的?光電旋轉(zhuǎn)編碼器使用方法是什么?單片機(jī)讀取光柵編碼器角度的方法是什么?
2021-06-30 07:29:18
編碼器實(shí)現(xiàn)指標(biāo)分析LDPC碼編碼器實(shí)現(xiàn)編碼器方案驗(yàn)證與優(yōu)缺點(diǎn)分析
2021-04-30 06:08:10
本帖最后由 這般緣 于 2016-5-13 11:03 編輯
如題,我現(xiàn)在角度編碼器加電后A,B相用示波器看能看到波形。選的計(jì)數(shù)器卡是NI6284的,角度編碼器的A,Z,B與6284ctr0
2016-05-13 10:59:13
。光電編碼器,是一種集光、機(jī)、電為一體的數(shù)字測(cè)角裝置。作為一種重要的角度傳感器,在眾多領(lǐng)域用途廣泛。光電編碼器的核心部件是光電器件,它是能將光能轉(zhuǎn)換為電能的一種傳感器。光電轉(zhuǎn)換的理論基礎(chǔ)是光電效應(yīng),即
2022-01-24 06:47:03
如題,我現(xiàn)在角度編碼器加電后A,B相用示波器看能看到波形。選的計(jì)數(shù)器卡是NI6624的,角度編碼器的A,Z,B與6624ctr0的 ,SU,GATE,AUX對(duì)接好了。可是用NI MAX的計(jì)數(shù)器功能,和labview角度編碼器的范例怎么都調(diào)試不出來。求大神賜教
2019-10-24 10:35:00
如何使用高精度旋轉(zhuǎn)編碼器BH60測(cè)量步進(jìn)電機(jī)轉(zhuǎn)動(dòng)角度?
2021-10-28 06:35:20
如何利用DSP去設(shè)計(jì)一款MPEG-4編碼器?
2021-04-09 07:04:47
如何利用STM32的正交編碼器模式讀取編碼器的角度數(shù)據(jù)和速度?
2022-02-11 07:01:57
硬件:24V 直流開關(guān)電源5V 直流開關(guān)電源NI USB 6341/6210采集卡 (4計(jì)數(shù)器/2計(jì)數(shù)器)42步進(jìn)電機(jī)步進(jìn)電機(jī)驅(qū)動(dòng)器增量型旋轉(zhuǎn)編碼器600N軟件:LabviewDAQmx說明:控制步進(jìn)電機(jī)正反轉(zhuǎn),同時(shí)用編碼器采集步進(jìn)電機(jī)的旋轉(zhuǎn)角度。
2019-12-04 14:20:53
我想實(shí)現(xiàn)這樣的效果:先讀取編碼器上的角度值,然后連續(xù)發(fā)相位相差90度的脈沖去改變角度值(也就是用程序控制編碼器的旋鈕)并且不斷讀取編碼器上的值,我是用PCI-6221(37Pin)采集卡的,求各位大神幫幫忙。。。。。
2013-07-22 17:25:38
編碼器的關(guān)鍵參數(shù)有哪些呢?怎樣使用STM32的編碼器功能去讀取編碼器反饋的脈沖數(shù)呢?
2022-01-26 07:54:42
STM32編碼器的原理是什么?為什么要用STM32編碼器呢?怎樣去使用STM32編碼器呢?
2021-11-22 08:08:18
我想實(shí)現(xiàn)這樣的效果:先讀取編碼器上的角度值,然后連續(xù)發(fā)相位相差90度的脈沖去改變角度值(也就是用程序控制編碼器的旋鈕)并且不斷讀取編碼器上的值,我是用PCI-6221(37Pin)采集卡的,求各位大神幫幫忙。。。。。
2013-07-23 08:21:13
的,有電流信號(hào)的,還有電壓信號(hào)的。拉繩編碼器去掉拉線盒就是角位移傳感器主要是測(cè)量角度位移變化的,它的測(cè)量角度有0-180°,0-360°,0-1800°0-3600°,它的輸出信號(hào)有0-5K
2019-12-16 11:05:35
一、介紹?? 旋轉(zhuǎn)編碼器是一種機(jī)電裝置,可將軸或軸的角位置或運(yùn)動(dòng),轉(zhuǎn)換為模擬或數(shù)字代碼。旋轉(zhuǎn)編碼器通常放置在垂直于軸的一側(cè)。旋轉(zhuǎn)編碼器用作檢測(cè)自動(dòng)化領(lǐng)域中的角度,速度,長(zhǎng)度,位置和加速度的傳感器。二
2021-06-30 07:37:51
選擇光編碼器還是磁編碼器可靠的編碼器,必須保證每次轉(zhuǎn)過相同的角度發(fā)出同樣數(shù)量的脈沖。光編碼器光收發(fā)器和旋轉(zhuǎn)碼盤比磁編碼器的芯片更容易損壞。磁編碼器幾乎沒有運(yùn)動(dòng)部件。而光編碼器靠著脆弱的機(jī)構(gòu)來獲取
2021-06-28 11:35:40
【來源】:《電子與電腦》2010年02期【摘要】:<正>泰克公司日前宣布,為中國推出首款直流電源PWS2000-SC簡(jiǎn)體中文系列,以支持中國嵌入式系統(tǒng)設(shè)計(jì)工
2010-04-23 11:27:11
有人用過海德漢IK220卡讀取SSI編碼器角度么。運(yùn)行海德漢自己給的讀SSI的VI,總是提示找不到卡。這是什么原因呢。
2017-04-14 15:52:22
有什么辦法可以計(jì)算出相對(duì)式編碼器的轉(zhuǎn)動(dòng)角度
2023-10-12 06:30:01
Ambition 編碼器經(jīng)過十多年的技術(shù)積累,其可靠性已經(jīng)在多個(gè)領(lǐng)域得到驗(yàn)證。其最新一代基于 MT 芯片的編碼器,可以實(shí)現(xiàn)±0.5°以內(nèi)的角度檢測(cè)精度,并將整個(gè)系統(tǒng)的延時(shí)減小到了 2 微妙以內(nèi),可以
2020-03-12 11:19:31
周期范圍內(nèi)不會(huì)出現(xiàn)重復(fù)的信號(hào)輸出,每個(gè)角度的位置編碼都是獨(dú)一無二的。絕對(duì)編碼器有單圈與多圈之分,而單圈與多圈絕對(duì)值編碼器的區(qū)別,僅僅是在角度位置編碼輸出量程上的不同而已,前者的量程只有一圈,而后者可以
2023-04-20 16:19:54
脈沖編碼器的工作原理脈沖編碼器是一種光學(xué)式位置檢測(cè)元件,編碼盤直接裝在電機(jī)的旋轉(zhuǎn)軸上,以測(cè)出軸的旋轉(zhuǎn)角度位置和速度變化,其輸出信號(hào)為電脈沖。是一種常用的角位移傳感器。同時(shí)也可作速度檢測(cè)裝置。脈沖
2021-07-12 08:36:38
光電軸角編碼器是什么?TMS320F2812是什么?MAX125是什么?怎樣去設(shè)計(jì)一款高精度編碼器動(dòng)態(tài)細(xì)分誤差的快速測(cè)量系統(tǒng)?與傳統(tǒng)的靜態(tài)檢測(cè)編碼器細(xì)分誤差方法相比,高精度編碼器動(dòng)態(tài)細(xì)分誤差的快速測(cè)量系統(tǒng)有哪些長(zhǎng)處?
2021-04-15 06:55:25
這種編碼器和正交編碼器不同,B通道是一個(gè)5V或0V的信號(hào)。正交編碼器的B通道與A通道是頻率相同的信號(hào)。創(chuàng)建角度編碼器通道,只能顯示順時(shí)針角度變化和重置。使用邊沿計(jì)數(shù)通道,能看到順時(shí)針計(jì)數(shù)增加,逆時(shí)針計(jì)數(shù)減少,數(shù)據(jù)是累加或累減的,不能重置。
2019-03-01 17:52:00
尺寸至關(guān)重要決定一切!德國品牌進(jìn)口Posital博思特/小型編碼器/微型/迷你KIT多圈編碼器,在工業(yè)自動(dòng)化行業(yè),產(chǎn)品兼?zhèn)渚o湊性與卓越性能在高度緊湊的封裝中提供卓越的性能將會(huì)是一個(gè)巨大
2022-04-27 10:15:04
增量型編碼器與絕對(duì)型編碼器的區(qū)別
編碼器如以信號(hào)原理來分,有增量型編碼器,絕對(duì)型編碼器。 增 量 型 編 碼 器 (旋轉(zhuǎn)
2009-09-26 17:36:292348 光電編碼器
角度編碼器是測(cè)量角位移的最直接、最有效的數(shù)字式傳感器,它可將角位移轉(zhuǎn)換成增量脈沖或二進(jìn)制編碼,因此角度
2009-10-29 22:51:251498 HMA系列光電編碼器
HMA系列光電編碼器特點(diǎn): ■ 增量式(通用型,實(shí)心軸)● 外形尺寸:體積小,外徑?38mm,厚度為
2009-10-29 22:59:452257 
編碼器,編碼器是什么意思
編碼器
編碼器(encoder)是將信號(hào)
2010-03-08 15:04:262868 光電編碼器,光電編碼器是什么意思
光電編碼器光電編碼器,是一種通過光電轉(zhuǎn)換將輸出軸上的機(jī)械幾何位移量轉(zhuǎn)換成脈沖或
2010-03-08 15:20:401431 PCM編碼器,PCM編碼器是什么意思
優(yōu)先編碼器:
上述機(jī)械式按鍵編碼電路雖然比較簡(jiǎn)單,但當(dāng)同時(shí)按下兩個(gè)或更多個(gè)鍵時(shí),其輸出將是
2010-03-08 16:27:552243 奧地利微電子公司(SIX股票代碼:AMS)今天宣布推出一款14位的磁性編碼器芯片AS5048,其全新特性可為基于單片機(jī)的應(yīng)用帶來比以往更方便的精確、可靠的角度測(cè)量。
2012-04-19 13:39:044544 本文首先介紹了電位器和編碼器是什么,其次介紹了電位器和編碼器在旋轉(zhuǎn)角度、工作原理上的不同。
2018-10-17 17:10:4528337 絕對(duì)值編碼器安裝目前市場(chǎng)上提供的絕對(duì)值編碼器,一般情況下主要 有兩種型號(hào),分別是單圈絕對(duì)值編碼器和多圈絕對(duì)值編碼器,前者在使用過程中轉(zhuǎn)動(dòng)角度不會(huì)超過360度而后者多圈式編碼器在使用中轉(zhuǎn)動(dòng)角度會(huì)超過360度。
2018-12-06 16:49:2212057 本文主要闡述了增量式編碼器與絕對(duì)式編碼器的區(qū)別。
2019-11-06 14:56:4060888 脈沖編碼器是一種光學(xué)式位置檢測(cè)元件,編碼盤直接裝在電機(jī)的旋轉(zhuǎn)軸上,以測(cè)出軸的旋轉(zhuǎn)角度位置和速度變化,其輸出信號(hào)為電脈沖。
2019-11-07 10:15:5016668 絕對(duì)編碼器這是能將電動(dòng)機(jī)一轉(zhuǎn)內(nèi)的角度數(shù)據(jù)輸出到外部目標(biāo)的檢測(cè)器。絕對(duì)編碼器一般能夠以8到12位輸出360 °絕對(duì)值編碼器與增量編碼器工作原理非常相似。
2019-12-04 11:06:1826365 要實(shí)現(xiàn)這個(gè)功能,我們需要在被測(cè)量的軸上安裝一個(gè)編碼器一般是增量型,要測(cè)量軸的正反轉(zhuǎn)采用AB相輸出,只要測(cè)量一個(gè)方向的用A單相輸出即可,如果還需要測(cè)量角度位置的話采用ABZ相輸出的編碼器比較好。
2019-12-19 09:26:5419393 旋轉(zhuǎn)編碼器是工業(yè)中重要的機(jī)械位置角度、長(zhǎng)度、速度反饋并參與控制的傳感器,旋轉(zhuǎn)編碼器分增量值編碼器、絕對(duì)值編碼器、絕對(duì)值多圈編碼器。
2020-03-12 15:59:054680 是什么呢? 首先我們要看拉線編碼器的結(jié)構(gòu)了,顧名思義,拉線編碼器它是由編碼器和拉線盒組成的,編碼器也叫角位移傳感器,是用來測(cè)量角度的,輸出的是方波信號(hào),一圈有幾十、幾百、或者幾千個(gè)脈沖數(shù),角位移傳感器測(cè)量角度就
2020-05-12 17:10:136768 編碼器一般用在普通電機(jī)的軸端采集旋轉(zhuǎn)了多少角度,伺服和步進(jìn)電機(jī)都有自帶的信號(hào)反饋一般不需要加裝編碼器,通過轉(zhuǎn)子在編碼器內(nèi)部掃過了多少個(gè)暗刻線來輸出多少個(gè)脈沖信號(hào),精度選擇就是編碼器有多少分辨率,越高
2021-02-19 15:33:5110537 
什么是編碼器?編碼器是對(duì)旋轉(zhuǎn)角度和線性位移進(jìn)行編碼的傳感器。
2021-03-18 11:41:466337 電子發(fā)燒友網(wǎng)報(bào)道(文/李寧遠(yuǎn))在伺服驅(qū)動(dòng)器位置傳感器的設(shè)計(jì)上,通常需要具有高EMC抗擾度和較少的外機(jī)接口;同時(shí)在電源設(shè)計(jì)上要做到外形小巧,高效率和低噪聲;而在編碼器的設(shè)計(jì)上,則通常使用小尺寸,低功率
2021-11-13 10:02:503440 STM32的正交編碼器模式讀取編碼器的角度數(shù)據(jù)和速度
2021-12-08 17:06:11 137
137 Melexis推出兩款相對(duì)壓力傳感器芯片,在嚴(yán)苛的介質(zhì)中具有更優(yōu)異的魯棒性。這兩款面向市場(chǎng)推出的超高精度壓力傳感器芯片完善了Melexis無PCB平臺(tái)產(chǎn)品系列。
2023-04-03 10:35:38777 微型編碼器 RI90P1-QR20-LU4X2-0.24-AMP01-3P 微型編碼器具有超出e1/E1要求的IP68/IP69K防護(hù)等級(jí),并采用71 x 64 x 20 mm的緊湊型外殼。是圖爾克
2023-04-27 15:40:22669 fenac進(jìn)口編碼器,提供定制替換選型服務(wù)!新推出16mm外徑微型編碼器
2021-12-06 10:08:282506 
的作用。通過對(duì)生產(chǎn)裝備或機(jī)器人的位移和角度等數(shù)據(jù)的傳感和處理,可以實(shí)現(xiàn)自動(dòng)化控制和調(diào)整,提高生產(chǎn)效率和品質(zhì)。編碼器也可以幫助工程師研究和改善系統(tǒng)運(yùn)行,優(yōu)化設(shè)計(jì)并提高生
2023-03-13 17:44:184731 
,即可配置多圈絕對(duì)值編碼器也可配置單圈絕對(duì)值編碼器;設(shè)備上方的齒輪盤,可根據(jù)使用場(chǎng)所的實(shí)際安裝的尺寸定制,實(shí)現(xiàn)不同類型、不同齒輪嚙合比率的斗輪堆取料機(jī)、塔吊等機(jī)械
2023-03-22 14:12:211761 
增量型編碼器與絕對(duì)值型編碼器怎么選擇?在進(jìn)行編碼器選擇時(shí),增量型編碼器和絕對(duì)值型編碼器是兩種常見的選擇。增量型編碼器是一種基于脈沖計(jì)數(shù)的編碼器,通常由光電編碼器和霍爾編碼器組成。這種編碼器的主要優(yōu)點(diǎn)
2023-05-08 11:28:331341 
編碼器種類及型號(hào):最常見的編碼器類型是旋轉(zhuǎn)編碼器和線性編碼器。旋轉(zhuǎn)編碼器通常用于測(cè)量機(jī)器人的關(guān)節(jié)位置,以及測(cè)量車輛和船只的轉(zhuǎn)向角度。線性編碼器通常用于測(cè)量運(yùn)動(dòng)平臺(tái)的位置和速度。旋轉(zhuǎn)編碼器和線性編碼器可以分為絕對(duì)式和增量式編碼器。絕對(duì)式編碼器可以直接讀取位置信息,而增量式編碼器則需要計(jì)算位置信息。
2023-05-18 11:15:003457 
編碼器是什么?編碼器有哪些分類及應(yīng)用;編碼器是什么?在數(shù)字信號(hào)處理和通信系統(tǒng)中,編碼器是一種重要的設(shè)備,用于將原始數(shù)據(jù)轉(zhuǎn)換為字符序列或二進(jìn)制碼序列。編碼器是一種可以同時(shí)測(cè)量物體位置和方向的蒿精度
2023-05-18 11:08:473133 
多維科技TMR3103和TMR3106角度編碼器芯片產(chǎn)品適用于BLDC無刷電機(jī)位置檢測(cè)、轉(zhuǎn)速檢測(cè)、閉環(huán)步進(jìn)電機(jī)位置檢測(cè)及多種非接觸式角度檢測(cè)等應(yīng)用。
2023-07-03 14:50:461000 
光電編碼器的使用場(chǎng)合很多,很多地方都可以用到,進(jìn)行角度測(cè)量,長(zhǎng)度測(cè)量,速度測(cè)量,位置測(cè)量都可以,本文將詳細(xì)介紹如何選擇光電編碼器以及選擇光電編碼器是需要考慮的因素。
2023-07-21 14:38:20693 一種將角位移或者角速度轉(zhuǎn)換成一連串電數(shù)字脈沖的旋轉(zhuǎn)式傳感器,我們可以通過編碼器測(cè)量到位移或者速度信息。編碼器通常由一個(gè)旋轉(zhuǎn)部分和一個(gè)固定部分組成,旋轉(zhuǎn)部分隨著被測(cè)量的物體進(jìn)行旋轉(zhuǎn),固定部分則保持不動(dòng)。當(dāng)旋轉(zhuǎn)部分發(fā)生旋轉(zhuǎn)時(shí),編碼器會(huì)產(chǎn)生一系列的電數(shù)字脈沖信號(hào),這些脈沖信號(hào)可以用來確定旋轉(zhuǎn)角度或角速度。
2023-08-21 11:50:005003 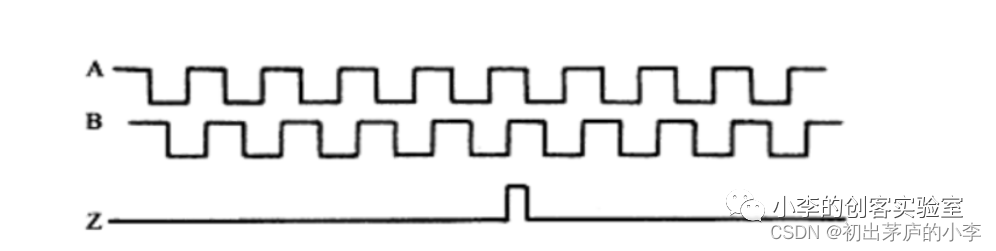
光電編碼器由光源、碼盤和光電接收器組成,其中碼盤是編碼器的重要部分。光電編碼器主要用于測(cè)量位移或角度。傳統(tǒng)光電編碼器的碼盤材料通常有玻璃、金屬和塑料。玻璃碼盤在玻璃上沉積了非常細(xì)的線條,其耐熱穩(wěn)定性和精度可以達(dá)到一般的標(biāo)準(zhǔn)和需求,但非常容易破裂。
2023-10-24 10:55:201059 
EC11編碼器是一種常用的編碼器,通常用于工業(yè)自動(dòng)化、機(jī)器人、數(shù)控機(jī)床等領(lǐng)域。為了驅(qū)動(dòng)EC11編碼器的正常工作,需要使用相應(yīng)的驅(qū)動(dòng)芯片。下面將詳細(xì)介紹EC11編碼器的驅(qū)動(dòng)芯片。 一、EC11編碼器
2023-12-13 10:43:46491 Melexis推出Triaxis微功耗磁力計(jì)MLX90394。這是一款基于霍爾效應(yīng)的微型傳感器芯片,該產(chǎn)品實(shí)現(xiàn)了低噪音、微電流消耗和成本之間的平衡設(shè)計(jì)。
2023-12-15 13:38:07423 全球微電子工程公司Melexis近日宣布,推出首款采用全新專利Triphibian?技術(shù)的壓力傳感器芯片MLX90830。
2024-01-22 13:58:09393 編碼器(Encoder)是將輸入數(shù)據(jù)轉(zhuǎn)化為特定編碼表示的一種技術(shù)。對(duì)于不同類型的編碼器,評(píng)判其好壞可以從多個(gè)方面進(jìn)行考量,包括編碼質(zhì)量、速度、模型結(jié)構(gòu)等。 編碼器的原理主要基于自動(dòng)編碼器
2024-01-23 10:58:07415
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論