 電子發燒友App
電子發燒友App


摘要:在簡要分析了多媒體監控系統發展現狀的基礎上,提出了一種基于VW2010壓縮/解壓芯片的多媒體壓縮/解壓卡的設計方案,給出了基于VW2010的多媒體監控系統壓縮和解壓卡的硬件結構圖以及在Linux系統下VW2010的驅動程序,同時給出了在Linux Redhat 7.3下編寫的測試程序,并進行了全面的測試。
1 MPEG-4標準及其在多媒體監控系統中的應用
多媒體監控系統是多媒體技術在安防領域的新應用。目前已廣泛應用到金融、文博、酒店、交通、商業、醫院、工廠、學校、住宅小區物業管理等各個領域。從目前趨勢看,多媒體監控系統的應用領域還在不斷擴展。
音視頻壓縮技術是多媒體監控系統中的關鍵技術。在數字多媒體壓縮(特別是視頻壓縮)領域內有很多國際標準(如ISO/ITU-T技術委員會的JPEG標準、CCITT制定的H.263標準以及著名的MPEG標準等)。其中,MPEG-1標準適用于傳輸1.5Mbps的運動圖形及其伴音編碼,它具有較高的壓縮比,其基本算法對于壓縮水平方向為360個像素、垂直方向為288個像素,并以每秒24~30幀畫面運動的圖像有較好的效果。早期的監控系統很多都采用此標準(如著名的以色列芯片Z1510即采用MPEG-1標準);而MPEG-4標準的主要特點是可對圖像中的內容進行編碼,其核心是基于內容尺度可變性(Content-based scalability)。內容尺度可變性意味著可以給圖像中的各個對象分配優先級。其中,比較重要的對象用較高的空間和(或)時間分辨力表示。對于比較低的比特率應用系統來說,尺度可變性是一個關鍵的因素,因為它提供了自適應可用資源的能力。例如,這個功能允許對具有較高優先級的對象用可接受的質量進行顯示,第二優先級的對象則用較低的質量顯示,而其余內容(對象)則不顯示。對于監控系統來說,在絕大部分時間內,監視畫面的背景都保持不變,因此,在要求的比特率比較低時,對于監視畫面的背景部分可以以較低的質量顯示,這樣并不會影響整個畫面的效果。
本系統采用MPEG-4壓縮標準,選擇的實現方式是硬壓縮和硬解壓,所用的壓縮解壓芯片為VWEB公司的VW2010。
2 硬件設計原理
2.1 VW2010的主要特點
VW2010是VWEB公司開發的實時MPEG-4音視頻壓縮/解壓芯片(CODEC)。該芯片具有以下主要特點:
(1)片內集成有3個信號處理/控制單元,包括一個視頻編碼(壓縮)器、一個視頻解碼(解壓)器和一個片內CPU(內部擴展一個音頻編碼DSP、一個音頻解碼DSP、一個多路復合單元和一個多路解復合單元)。VW2010芯片的內部結構圖如圖1所示。
(2)具有可編程、高性能和低功耗特點,因為每個信號處理/控制單元都由一個RISC處理器和專用的硬件加速器構成。此外,視頻編、解碼器內部還集成了一個專用的SDRAM。
(3)在系統上電/復位時,視頻編、解碼器的固件程序可由外部主機(host)載入各自專用的SDRAM;而片內CPU的固件程序則可載入VW2010外掛的SDRAM。
(4)芯片的主機接口采用標準PCI接口。符合PCI局部總線規范2.2。
(5)為了使編、解碼性能達到最佳,VW2010內部集成了一個雙通道DMAC。系統host可直接通過主機接口對VW2010進行控制,MPEG數據流采用DMA方式傳輸。
(6)提供有與PHILIPS公司兼容的I2C總線,可方便地對外圍芯片進行控制。
2.2 基于VW2010的壓縮/解壓卡硬件設計
圖2所示是用VW2010設計的壓縮卡的原理框圖。圖中,CVBS信號先經過視頻接收電路進行前端處理(包括阻抗匹配、限幅和鉗位),然后通過視頻解碼電路產生符合VW2010視頻接口標準的ITU656信號。 視頻解碼電路的核心是一個視頻解碼芯片,該解碼芯片用于對CVBS信號進行A/D轉換和編碼,以產生ITU656標準的并行數字電視信號。高檔的視頻解碼器還支持圖像尺寸縮放(scaling)和幀提取(decimating)功能,如PHILIPS公司的SAA7114、SAA7115以及Rockwell公司的BT829A等。由于VW2010的視頻輸入為ITU656/D1格式,所以只需要選擇具有基本A/D轉換和編碼功能的視頻解碼芯片如SAA7113即可。
在模擬音頻信號經過模擬音頻接收電路進行前端處理后,便可通過音頻ADC電路產生符合VW2010音頻接口標準的I2S信號。
VW2010是壓縮卡的核心處理芯片,該芯片除可完成音、視頻信號的編碼外,還可提供對解碼器和ADC的控制(通過I2C總線),其編碼產生的MPEG流可通過芯片內部集成的PCI接口輸出。VW2010的解壓操作是壓縮操作的逆過程,基本原理類似,基于VW2010的解壓卡原理框圖如圖3所示。
3 Linux下VW2010設備驅動程序設計
3.1 分層軟件體系結構
按照操作系統的觀點,系統軟件體系結構應為表1所列的分層結構。驅動程序工作在核心態,并向下通過Chip API實現對VW2010芯片的直接控制,向上則為應用程序提供驅動程序接口(Driver API)。按照Rubini先生的觀點,驅動程序提供的是機制,而不是策略。換句話說,驅動程序的主要任務是為應用提供全面、高效而可靠的服務,具體如何使用硬件則是應用需要解決的問題。
表1 分層軟件體系結構示意圖
| Software | Mode |
| Application | User mode |
| Driver API | |
| Driver | Kernel mode |
| Chip API | |
| Firmware | HardWare layer |
考慮到Linux系統下的設備驅動程序開發技術已經相當成熟,筆者不打算詳細介紹驅動程序的完整框架和各個模塊,而是在分析VW2010芯片與host通信機制的基礎上,著重討論在驅動程序中如何實現對VW2010芯片的有效控制以及如何通過應用程序實現VW2010芯片間數據的有效傳輸。
3.2 VW2010與host的通信機制
VW2010提供了三種與host通信的機制:直接訪問內部寄存器、共享存儲區(shared memory)和DMA。VW2010允許host直接訪問其內部寄存器和外部存儲單元,寄存器方式主要用于調試目的和下載固件程序;DMA方式則負責VW2010芯片和應用緩沖區之間的數據傳輸(如MPEG數據流);共享存儲區機制是設備驅動程序和VW2010間的主要通信方式。
(1) 共享存儲區(shared memory)
VW2010采用共享存儲區機制接收host的命令并返回命令執行結果。host與VW2010進行通信的共享存儲區(以下簡稱SM_PC2VW)位于encoder SDRAM中地址3F1800處,共128字節;而VW2010與host進行通信的共享存儲區(以下簡稱SM_ VW2PC)則位于encoder SDRAM中的地址3F1880處,也是128字節。
SM_PC2VW的格式如表2所列。表中,CMD為命令碼,分別為:讀數據(CMD=1)、發IOCTL碼(CMD=2)、寫數據(CMD=3)、打開命令(CMD=4)和關閉命令(CMD=5);IntFlag為中斷標識,IntFlag為1時,VW2010執行完CMD定義的任務后將產生一個中斷,為0則不產生中斷;Device Handle由打開命令從firmware中獲得,當CMD不同時,Parameters有不同的含義。
表2 host到VW2010的共享內存區格式
| Address | 31:16 | 15:8 | 7:0 |
| 3F1800 | Reserved | IntFlag | CMD |
| 3F1804 | Reserved | Reserved | Reserved |
| 3F1808 | Reserved | ||
| 3F180C | Device Handle | ||
| 3F1810 | Parameters | ||
| 3F1814 | …… | ||
表3 VW2010到host的共享內存區格式
| Address | 31:16 | 15:8 | 7:0 |
| 3F1880 | Reserved | Reserved | Reserved |
| 3F1884 | Reserved | ACK/NACK | CMD |
| 3F1888 | Return Code | ||
| 3F188C | Device Handle | ||
| 3F1890 | Parameters | ||
| 3F1894 | …… | ||
SM_VW2PC的格式如表3所列。ACK/NACK的含義是:如果SM_PC2VW中的IntFlag為1,且命令CMD成功執行,則為ACK;如果SM_PC2VW中IntFlag為1,而執行命令CMD失敗,則為NACK,并將錯誤碼保存在Return Code字段。
一般在發送其它命令之前,必須先發送打開命令,此時,Device Handle字段應為0,Parameters字段為打開類型(TSMUX,PSMUX,TSDEMUX或PSDE-MUX)。如果該命令成功執行,則會在SM_VW2PC的Device Handle字段返回所分配的Device Handle,并在SM_VW2PC的Parameters字段返回輔助參數區的首地址(下面簡稱為X)。輔助參數區由firmware在encoder SDRAM中動態分配,主要用于傳遞與命令有關的參數。
在結束使用共享內存區后,必須發送關閉命令以釋放輔助參數區。
(2)信號燈
由于共享存儲區是臨界資源,所以必須提供一種機制,以保證VW2010和host使用時不發生沖突。為此,VW2010分別給SM_PC2VW和SM_ VW 2PC提供了兩個硬件信號燈,它們由寄存器REG_INT1和REG_INT2的最低位控制。此外,VW2010還為信號燈定義了以下兩種操作。
寫操作:向REG_INT1或REG_INT2最低位寫入1,然后釋放共享存儲區。
讀操作:返回REG_INT1或REG_INT2最低位的值,同時清該位為0。
(3) host到VW2010的中斷
host通常通過向VW2010發中斷的方式通知VW2010從共享存儲區讀取主機命令。VW2010用寄存器REG_DHIU5實現host到VW2010的中斷。
REG_DHIU5的最低四位用于保存中斷計數,第五位為中斷屏蔽位。host向REG_DHIU5每寫一次,中斷計數加1;VW2010每讀REG_DHIU5一次,中斷計數減1。只要中斷計數不為0,VW2010內部的中斷請求信號將一直保持有效。
3.3 VW2010的數據讀寫和IOCTL方法的實現
VW2010的數據讀寫和IOCTL的實現依賴于上述的共享存儲區機制,下面通過假設已經用打開命令(CMD=4)從firmware獲取了Device Handle和輔助參數區(首地址為X)來進行討論。
(1) 數據讀寫的實現
圖4和圖5分別給出了VW2010在系統調用部分和中斷服務部分的讀數據流程圖。
VW2010采用DMA方式實現與應用空間的數據交換。讀/寫命令用于建立從VW2010到host的DMA通道并啟動數據傳輸,它并不等待數據傳輸完成,而是讓DMA傳輸在后臺運行,當DMA傳輸結束后,VW2010將中斷主機。
當應用程序要讀寫數據時,它首先會分配一些緩沖區用于保存讀寫數據。這些緩沖區可以用首地址和長度標識,如可以使用(Address,Len)代表首地址為Address、長度為Len的緩沖區。在發送讀/寫數據命令時,SM_PC2VW的Parameters字段為X,輔助參數區的內容為應用空間數據緩沖區的信息,其格式即為上述的首地址和緩沖長度標識對(Address,Len)。VW2010根據這些緩沖區信息來建立應用空間的DMA通道。
(2)IOCTL的實現
使用時,可定義多種IOCTL碼以用于控制VW2010芯片,各IOCTL碼的參數各不相同。需要注意的是,此處的IOCTL碼不同于Driver API中的IOCTL碼。該命令與讀寫數據命令的主要區別在于其命令輔助參數存儲區的格式不同,而控制流程類似,限于篇幅,這里不再贅述。
4 結論
為了測試壓縮/解壓卡和設備驅動程序的性能,作者在Linux Redhat 7.3下編寫了測試程序。在測試中,分別讓VW2010芯片工作在手動錄像模式、定時錄像模式和動態偵測錄像模式。結果表明:該系統卡在各種模式下都能穩定工作。
- 壓卡設計(5133)


聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。 舉報投訴
相關推薦
VW2010
嵌入式多媒體應用的存儲器分配方法
嵌入式媒體播放器
嵌入式媒體播放器怎么實現?
嵌入式媒體網關的架構是什么?
嵌入式系統與遠程監控主機的網絡通信怎么實現?
嵌入式系統怎么實現遠程監控和升級?
嵌入式Linux音頻流媒體終端系統的設計資料分享
嵌入式SIP協議棧怎么設計?
嵌入式圖像監控系統怎么設計?
嵌入式怎么促進數字多媒體的發展?
嵌入式智能無線多媒體播放系統由什么組成?
嵌入式智能網絡視頻監控終端有什么功能?
嵌入式網絡監控系統有什么優點?
嵌入式視頻監控系統有什么功能?
嵌入式視頻監控系統視頻服務器該怎么設計?
嵌入式視頻監控的相關資料分享
FPGA初學者,請問有nios ii高階多媒體嵌入式系統開發套件的資料嗎?
Linux 2.6內核針對嵌入式開發的特點是什么
【NanoPi2申請】fpga與嵌入式相結合的多媒體數據采集系統
【OK210申請】基于飛凌嵌入式OK210的多媒體播放系統
【實戰項目一:嵌入式視頻監控系統】【初學必學】
一種嵌入式系統用于多媒體實時數據的網絡傳輸設計
一種基于ADSP-BF532的嵌入式網絡視頻服務器設計研究
一種新型的具有入侵掃描功能的嵌入式智能網絡視頻監控終端設計
分享一個不錯的嵌入式網絡視頻服務器的設計方案
基于嵌入式系統的多媒體實時數據網絡傳輸
基于嵌入式WEB的網絡視頻監控系統該如何去設計?
基于ARM Linux QT的掌上多媒體系統的設計和實現 (1)
基于ARM嵌入式系統的自動化配送系統
基于ARM嵌入式系統的自動化配送系統
基于ARM嵌入式系統的自動化配送系統
基于ARM嵌入式系統的自動化配送系統
基于DirectFB怎么嵌入式開發播放器?
基于DirectFB的嵌入式播放器該怎么設計?
基于H264的嵌入式視頻服務器的設計
如何利用B/S模式設計嵌入式視頻監控系統?
如何利用FPGA和嵌入式系統設計遠程監控系統?
如何去設計嵌入式Windows CE多媒體操作系統的硬件平臺?
如何設計嵌入式DSP數字視頻監控系統的硬件電路?
如何設計嵌入式無線視頻監控系統?
如何設計一種嵌入式MPEG4視頻監控系統?
如何設計一種嵌入式網絡化視頻監控系統?
怎么實現在嵌入式環境下使用QT多媒體框架?
怎么實現基于Intel Xscale和嵌入式Linux 的視頻模塊設計?
怎么實現基于TMS320DM355的四路視頻多媒體監控器的設計?
怎么實現基于Winodws CE的嵌入式網絡監控系統的設計?
無線智能多媒體數字播放系統是什么組成的?
智能無線多媒體播放系統嵌入式設計方案
淺析嵌入式系統中的數據無損壓縮
金融系統內嵌入式DVR監控應用以及方案的設計思路探討
基于WINCE的多媒體視頻監控系統設計
 23
23基于VW2010和MPEG-4的視頻服務器設計
39基于VW2010芯片的網絡視頻壓縮編解碼器設計與實現
43基于MPC823e的嵌入式多媒體信息終端硬件開發平臺設計
13一種新的嵌入式MPEG4 DVR系統設計
17基于PNX1500的嵌入多媒體平臺
13基于PNX1500的嵌入多媒體平臺
22基于EVP-6100嵌入式多媒體處理機的智能視頻監控系統
15
多媒體數據壓縮標準
34嵌入式多媒體應用的多核編程框架
29嵌入式多媒體監控系統中壓縮/解壓卡的設計解析
0應用于廣播視頻監控系統中MPEG-4解碼卡的設計
 1552
1552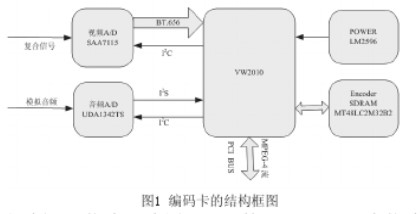
基于ET系列芯片的嵌入式多媒體導游系統的設計
342基于TMS320DM642多媒體芯片實現視頻監控系統的應用方案
2845
嵌入式QT多媒體
5嵌入式系統數據無損壓縮
1- 設計技術
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術
- 測量儀表
- 嵌入式技術
- 制造/封裝
- 模擬技術
- RF/無線
- 接口/總線/驅動
- 處理器/DSP
- EDA/IC設計
- 存儲技術
- 光電顯示
- EMC/EMI設計
- 連接器
- 行業應用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網絡
- 醫療電子
- 人工智能
- 虛擬現實
- 可穿戴設備
- 機器人
- 安全設備/系統
- 軍用/航空電子
- 移動通信
- 工業控制
- 便攜設備
- 觸控感測
- 物聯網
- 智能電網
- 區塊鏈
- 新科技
- 聯系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應鏈服務 PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區合作
- 劉勇:liuyong@huaqiu.com
-
關注我們的微信

-
下載發燒友APP

-
電子發燒友觀察



版權所有 ? 深圳華秋電子有限公司
電子發燒友 (電路圖) 粵公網安備 44030402000349 號 電信與信息服務業務經營許可證:合字B2-20210191 工商網監
湘ICP備 2023018690 號
工商網監
湘ICP備 2023018690 號
評論