 電子發燒友App
電子發燒友App


摘要 GSM/GPRS與GPS之間靈活的組合和配置,以及軟件和硬件客戶的個性化定制方案,使UB680模塊非常適用于追蹤器、防盜短信報警器、監控器、小孩/老人/病人/寵物監護、車載調度等,也可應用于帶導航功能的智能手機等手持設備和行業應用中。文中闡述UB680 GSM+GPS模塊的構建方法和實現過程,改進了GSM和GPS模塊各自獨立的解決方案,實現了GSM對GPS的各種控制。
關鍵詞? GSM? 全球定位導航系統? 低噪聲放大器? UB680
1? 系統簡介
UB680模塊集成了四頻GSM/GPRS無線通信模塊和GPS接收機模塊,系統框圖如圖1所示。GSM和GPS兩者高度結合,提供了多種靈活的工作模式。GSM/GPRS和GPS接收機既可分別獨立工作又可由GSM/GPRS控制GPS。GPS信息可由本地控制和傳送,也可空中控制和傳送。60腳板對板連接器將各個功能接口留出,主要包括:GSM電源接口 (Power Supply)、 GPS電源接口(Power Supply)、ADC接口、 GSM串行通信接口 (2 Channel UART)、GPS串行通信接口(1 Channel UART)、雙通道模擬音頻接口(2 Channel Audio)、5×5矩陣式鍵盤接口(5×5 Keypad Array)、標準SIM卡接口、后備電池(RTC Backup)等。本身內嵌了TCP/IP協議,支持AT命令擴展,可以實現各種用戶個性化定制方案。
圖1? 系統框圖
2? 軟件架構
圖2? 軟件框圖
除了GSM/GPRS通信軟件功能和GPS receiver軟件外,還有融合二者的GPS數據接收、GPS數據發送、GPS控制和GPRS網絡自恢復機制4個部分,如圖2所示。GSM/GPRS單元使用GSM_UART2接收標準NMEA-0183格式的GPS數據,并且把接收的GPS數據按照用戶AT指令設置指定的傳送方式進行本地顯示或者傳送到第三方接收單元,第三方接收單元按照NMEA-0183標準對接收到的GPS數據進行二次處理。
GSM/GPRS單元可以通過GSM_UART2發送AT指令對GPS單元進行控制,例如控制GPS輸出的波特率和匯報時間等。當選擇以GPRS方式傳送GPS數據時,可能由于GPRS網絡異常、TCP/UDP斷開導致GPS數據傳送被迫中斷,GPRS自恢復機制能夠重新連接上GPRS網絡、激活PDP和建立TCP/UDP連接,從而最大程度地保證GPS數據傳輸的連續性和穩定性,為用戶提供優質的服務。
3? 工作模式
3.1? GPS單元與GSM/GPRS單元獨立工作模式
GPS單元與GSM/GPRS單元的獨立工作模式如圖3所示。
圖3? GPS GSM/GPRS獨立工作模式
GPS單元與GSM/GPRS單元可以看作是完全獨立的兩個個體,兩者可以脫離對方依賴單獨運行。它是GSM/GPRS單元和GPS模塊在硬件上的簡單組合。兩者之間在邏輯上無任何關系,GSM/GPRS通過其AT指令串口接受用戶的控制。GPS通過其串口向用戶匯報相應的定位信息以及接受用戶的各種配置控制。
GPS單元可作為一個獨立的實體,且提供一個端口GPS_UART0供用戶使用。GPS_UART0口既可輸出標準的NMEA0183協議的定位信息又可接受用戶的控制,輸出的定位信息可供GSM/GPRS單元或其他第三方單元使用處理。
通過GPS_UART0口可控制GPS的數據包括以下內容: GPS波特率——2 400、4 800、9 600、14 400、19 200、28 800、38 400、57 600、115 200 bps,啟動模式——Cold、Warm、Hot,停止模式——Stop、Sleep,時分區——Hour zone(-11,-10,-9, …,12 ),Minute zone(0、15、30、45),Debug時間間隔配置——0、5000,位置栓——終端顯示位置可鎖定不變,滿足一定越界條件才改變。GSM/GPRS單元也可視為一個獨立的實體,且提供2個串口GSM_UART0、GSM_UART1供用戶使用。GSM_UART1作為Debug口使用,打印調試信息、log信息等;GSM_UART0作為AT指令口使用,回顯數據,對指令功能進行設置、執行、測試、查詢等。
3.2? GPS單元與GSM/GPRS單元融合工作模式
在融合工作模式下,GPS的定位數據傳輸至GSM/GPRS單元并在該單元中根據用戶的配置進行相應的處理,可將GPS數據分別在串口輸出(工作模式2)、SMS傳輸和GPRS傳輸(工作模式3)。傳送的數據為標準的NMEA0183數據格式[1](以“$”開頭和*cc
3.2.1? GPS信息由GSM/GPRS串口輸出
通過在超級終端中輸入圖4中的AT指令實現。
圖4? PC控制指令
AT+PSIPR=115200;設置GPS COM口的波特率為115 200 bps
AT+GPSDATAMODE;設置GPS數據傳輸模式為1,即GPS數據在GPRS上傳輸
AT+GPSSTART;開始GPS任務
3.2.2? GPS信息由GPRS方式傳輸
① 打開Server服務器模擬程序。
② 設置本地端口號。
③ 選擇監聽按鈕。
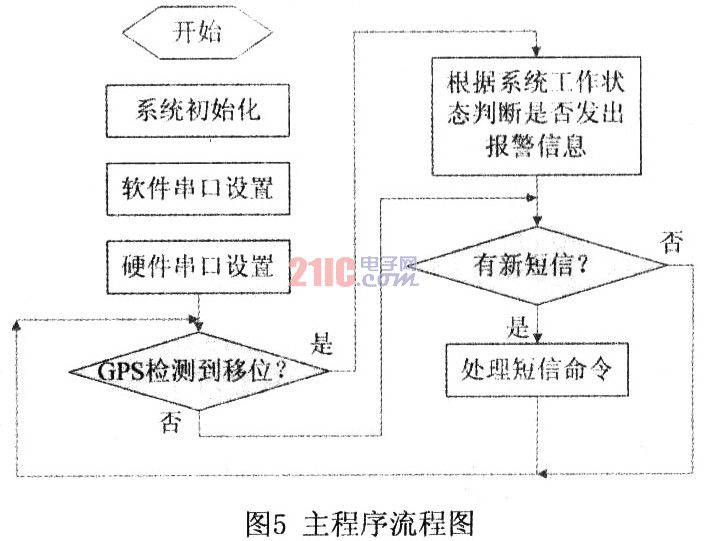
在超級終端對話框內依次輸入圖5所示命令:
AT+CGACT;激活PDP上下文
AT+GPSDATACONF;設置GPS數據以GPRS模式傳輸的網絡參數
圖5? PC控制指令
3.2.3? GPS數據通過SMS傳輸
GPS數據通過GSM的短消息形式傳輸,在超級終端對話框內依次輸入圖6所示命令:
AT+GPSDATAMOD;設置GPS數據傳輸模式為2,即GPS數據以GSM的短消息形式傳輸
AT+GPSSMSNUM;設置GPS數據以短信方式傳輸目的號碼
圖6? PC控制指令
3.3? GPS數據輸出頻率控制
GPS數據輸出,包括通過GSM/GPRS單元的串口輸出、SMS輸出和GPRS輸出。使用AT命令“AT+GPSOUTFREQ=[NUM]”可改變輸出頻率。注:NUM的取值范圍為1~65 535,單位為s。
4? GPS射頻性能調試
LNA UPG8231調試中所使用的GPS信號是由Agilent E4438C ESG矢量信號發生器[2]和409 GPS專用模塊產生的。可以生成多達8個實時GPS衛星信號,并可使用預配置的情景文件(包括多普勒頻移)對它們進行配置;或將之配置成與真正的衛星軌道保持同步,從而與衛星信號中包含的導航信息相一致。
GPS調試環境: 用E4438C矢量信號發生器(E4438C配上選件409 GPS)產生模擬GPS信號送到GPS模塊射頻輸入端,在PC端運行軟件SiRFDemo 3.86,用頻譜儀Agilent N8973A/N400A(Noise Source)測試噪聲系數。
4.1? 測試GPS射頻指標
(1) 系統噪聲系數
SirfstarIII的整個接收回路(參考接收機設計)大約有3.0 dB的系統噪聲系數,如表1所列。
表1? 系統增益和噪聲系數
根據公式: F=F1+(F2-1)/G1+(F3-1)/G1G2+(F4-1)/G1G2G3+…
F=(Input S/N)/ (Output S/N)
計算可得 F=2.5+0.06-0.15=2.41
式中F表示噪聲系數,G表示增益。
(2) LNA的S參數
按原V1.0板的匹配情況,LNA在1 575.42 MHz的S參數(S11=-2.8, S21=13.4, S22=-5.6,S12=-30)性能比較差。經過仔細調試,得到了LNA的最終匹配電路,如圖7所示。
圖7? LNA匹配后電路原理
GSC3f/LP定位所需要GPS信號的C/N為28? dB以上。本模塊在SiRFDemo3.86軟件上測試的性能為:當等效輸入功率為-120 dBm時,C/N為49 dB,當輸出功率為-136 dBm時,C/N為35 dB。Coretek自己做的另一款GPS模塊用 BGA615:-120 dBm時C/N為47 dB,-136 dBm時C/N為32 dB,NF為 2.8 dB。
最終LNA在1 575.42 MHz時的S參數為:S11=-14.6 dB,S21=16.7 dB,S22= -6.0 dB, S12=-37.2 dB NF=2.2?dB。如果考慮焊接到PCB上LNA的輸入和輸出端的那兩條射頻小線Cable Loss無法補償掉, LNA的增益在19 dB左右,LNA的真實NF應該在1.4 dB左右。
表2是對NEC的評估板實測情況(儀器為Agilent N8973A/N400A):
表2? NEC UPG8231評估板
由于焊接到電路板上LNA的輸入和輸出端的射頻線的插入損耗無法精確估計,從而帶來一些測量誤差。考慮到這些測量誤差的影響,我們認為設計取得了理想的效果,是比較成功的。
(3) 首次定位時間TTFF
TTFF如表3所列。
表3? TTFF
5? 系統設計中的缺陷
原因:設計中由于把GPS_TXD1直接連接到GSM_RXD2。沒有考慮到不同的基帶芯片之間存在的I/O電平的差異,導致系統運行時存在潛在的不穩定因素。筆者在hyperlynxV7.7中用LineSim仿真也預見了這種危險。
問題一:當GSM VBAT為0 V時,測量 GPS_TXD0的輸出(在示波器上觀察),同時在串口上測量,發現剛復位時有輸出波形,過幾十秒后串口無輸出。
查詢GSM基帶芯片手冊可知,如表4所列,Pin M5在GSM復位時為高電平。在剛加電時其狀態不穩造成GPS串口無輸出。
表4? I/O特性
問題二:剛上電時GPS串口無輸出,按GPS復位鍵后有輸出。
GSM復位信號的上升時間為800 μs,幅度為4.09 V;GPS復位信號的上升時間為1.44 ms,幅度為1.8 V。對剛上電GPS無輸出這種情況,初步認為是GPS電源部分的上電時序的問題,導致GPS復位不充分(即系統設計中沒有復位GPS用的Flash)。
編者注: 本文為期刊縮略版,全文見本刊網站www.mesnet.com.cn。
參考文獻
[1]? NMEA0183: the National Marine Electronics Association.
[2] ?Agilent E4438C應用手冊.
張國軍(研究生),主要研究方向為無線通信。
(收修改稿日期:2008-07-07)














 工商網監
工商網監
評論