 電子發(fā)燒友App
電子發(fā)燒友App


??? 關(guān)鍵詞:在系統(tǒng)可編程,存儲(chǔ)器,順時(shí)控制系統(tǒng)
1 引 言
順時(shí)控制系統(tǒng)廣泛地應(yīng)用于工廠機(jī)械、家用電器和玩具等的順時(shí)自動(dòng)控制;學(xué)校、部隊(duì)和機(jī)關(guān)企事業(yè)單位的作息時(shí)間控制也多采用順時(shí)控制系統(tǒng)。傳統(tǒng)的順時(shí)控制系統(tǒng)的實(shí)現(xiàn)方法是采用分立元件、中小規(guī)模集成電路、計(jì)算機(jī)控制法和PLC控制法等,其主要缺點(diǎn)是體積大、功耗大、成本高、實(shí)現(xiàn)起來較麻煩。本文介紹一種基于在系統(tǒng)可編程器件(ISP)和大規(guī)模IC芯片EPROM存儲(chǔ)器來實(shí)現(xiàn)的可編程的順時(shí)控制系統(tǒng)的設(shè)計(jì)方案,該方案的優(yōu)點(diǎn)是體積小、功耗小、調(diào)節(jié)靈活、多功能、可靠性高、編程簡單、實(shí)現(xiàn)簡便。該順時(shí)控制系統(tǒng)順時(shí)控制的最小時(shí)間間隔為10秒,每天可以非常方便地設(shè)定多達(dá)360個(gè)時(shí)刻(也可根據(jù)需要,設(shè)定更多時(shí)刻),并可非常隨意地改變?cè)O(shè)定時(shí)刻,實(shí)現(xiàn)一個(gè)控制系統(tǒng)同時(shí)順時(shí)控制多個(gè)目標(biāo)之功用。
2 新型多功能順時(shí)控制系統(tǒng)的工作原理
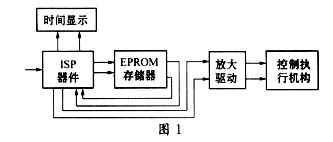
??? 圖1是多功能順時(shí)控制系統(tǒng)的工作原理框圖。
通過對(duì)ISP器件編程來實(shí)現(xiàn)時(shí)、分、秒記時(shí)顯示;同時(shí)產(chǎn)生EPROM存儲(chǔ)器的地址信號(hào),每個(gè)地址信號(hào)對(duì)應(yīng)一個(gè)時(shí)刻。通過事先對(duì)EPROM存儲(chǔ)器進(jìn)行編程,使得對(duì)應(yīng)于每個(gè)時(shí)刻的地址輸入“0”數(shù)據(jù)信號(hào),則發(fā)出負(fù)脈沖控制信號(hào)的最小時(shí)間間隔為10
秒,因此,1天(24小時(shí))可發(fā)出最多360個(gè)控制信號(hào),如果同時(shí)實(shí)現(xiàn)8路控制,每路1天最多可發(fā)出45個(gè)控制信號(hào),足以滿足任1路的控制要求。負(fù)脈沖控制信號(hào)的寬度為10秒,可以通過在ISP器件內(nèi)部編程的脈寬變窄電路使之轉(zhuǎn)換為寬度為1秒~5秒不等的正脈沖控制信號(hào),此控制信號(hào)再分別經(jīng)過放大驅(qū)動(dòng)電路來控制多路執(zhí)行機(jī)構(gòu)工作,實(shí)現(xiàn)1個(gè)控制系統(tǒng)多路控制的功能。
3 新型多功能順時(shí)控制系統(tǒng)的具體實(shí)現(xiàn)方法
本數(shù)字系統(tǒng)的設(shè)計(jì)是采用基于ISP芯片的自頂而下的模塊化設(shè)計(jì)方法。ISP芯片選用Lattice公司的ispLSI1032E器件,該器件有32個(gè)GLB,6000個(gè)PLD等效門,84個(gè)管腳,64個(gè)I/O端,8個(gè)直接輸入端,最高工作頻率為90MHz。設(shè)計(jì)工具選用Lattice公司設(shè)計(jì)的isp EXPERT7.XXSystem應(yīng)用開發(fā)軟件,該軟件是一套進(jìn)行FPLD設(shè)計(jì)的高級(jí)設(shè)計(jì)工具,它基于Windows操作系統(tǒng),支持多種模塊設(shè)計(jì)輸入方式,如:電路原理圖、ABEL-HDL、VHDL語言、Verilog-HDL語言等。該軟件支持邏輯功能仿真、器件時(shí)序仿真及邏輯綜合,可用原理圖、語言和混合法三種輸入方式工作,它是一種先進(jìn)的FPLD設(shè)計(jì)系統(tǒng)。在順時(shí)控制系統(tǒng)的數(shù)字部分,系統(tǒng)頂層設(shè)計(jì)包括子系統(tǒng)功能分配、內(nèi)部功能塊的
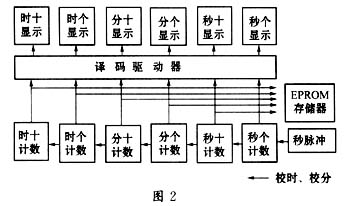
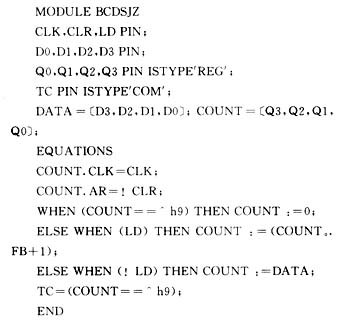
計(jì)數(shù)器和譯碼驅(qū)動(dòng)器設(shè)計(jì)在ISP內(nèi)部,10進(jìn)制計(jì)數(shù)器是最基本的模塊,用ABEL-HDL語言描述如下:
在10進(jìn)制計(jì)數(shù)器基礎(chǔ)上構(gòu)成60、24進(jìn)制計(jì)數(shù)器,譯碼驅(qū)動(dòng)器也用語言描述。通過手動(dòng)校時(shí)、校分,可以任意設(shè)定控制系統(tǒng)工作的起始時(shí)間。秒脈沖信號(hào)由石英晶體振蕩器和分頻器產(chǎn)生。為了對(duì)EPROM編程,需要把時(shí)間信號(hào)送到EPROM的地址端,為使時(shí)間最小間隔為10秒鐘,需要引出時(shí)十位Q1、Q0信號(hào),時(shí)個(gè)位Q3、Q2、Q1、Q0信號(hào),分十位Q2、Q1、Q0信號(hào),分個(gè)位Q3、Q2、Q1、Q0信號(hào),秒十位Q2、Q1、Q0信號(hào)等16根信號(hào)線。EPROM27128有14根地址線,需要用4片EPROM27128存儲(chǔ)器,圖3是全譯碼法構(gòu)成的4×16K×8存儲(chǔ)器。

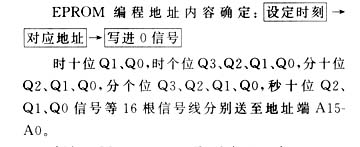
例如:時(shí)間08:25:30秒對(duì)應(yīng)地址為:212BH,即在該地址單元寫入0信號(hào)。
時(shí)間15:38:40秒對(duì)應(yīng)地址為:55C4H,即在該地址單元寫入0信號(hào)。
現(xiàn)采用SUPERPRO/L+編程器,對(duì)4片EPROM27128分別進(jìn)行編程,編程時(shí)編程器電纜線與計(jì)算機(jī)相連,編程的數(shù)據(jù)直接寫入數(shù)據(jù)緩沖區(qū),然后對(duì)EPROM27128進(jìn)行編程操作。如編程有誤或改變控制時(shí)刻,需擦除后重新編程。
因有8個(gè)數(shù)據(jù)輸出端,故同時(shí)可以控制8路執(zhí)行機(jī)構(gòu)。
??? 圖4是EPROM輸出后信號(hào)處理圖。
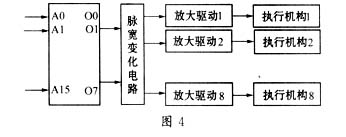
脈寬變化電路的作用是把10秒寬的負(fù)脈沖信號(hào)變?yōu)?秒~10秒寬度不等的正脈沖信號(hào)。圖5是設(shè)計(jì)在ISP器件內(nèi)部的脈寬變化電路。
預(yù)置時(shí)間到時(shí),10秒寬的正脈沖打開門電路1,讓1Hz的脈沖通過,計(jì)數(shù)器計(jì)數(shù),同時(shí),打開門電路
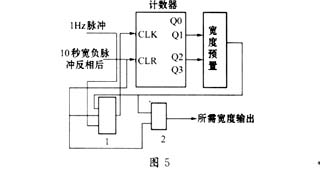
2,使之輸出從0電平到1電平,用原理圖設(shè)計(jì)的寬度預(yù)置模塊是門電路組合電路,到預(yù)置時(shí)間時(shí)發(fā)出低電平,關(guān)閉門電路1、2,使門電路2從1電平回到0電平,門電路2輸出所需寬度的脈沖信號(hào)。
在頂圖原理設(shè)計(jì)中,輸入輸出必須加緩沖器,鎖定在ispLSI1032E的管腳上,本研究的技術(shù)路線是:數(shù)字系統(tǒng)部分設(shè)計(jì)→輸入計(jì)算機(jī)產(chǎn)生JEDEC文件→下載到ISP器件里→對(duì)EPROM編程→設(shè)計(jì)外圍電路(脈沖產(chǎn)生電路、穩(wěn)壓電路、放大驅(qū)動(dòng)電路、信號(hào)處理電路等)→繪制總原理圖和接線圖→安裝、調(diào)試→測(cè)試、驗(yàn)證。
本文介紹的采用在系統(tǒng)可編程邏輯器件和EPROM存儲(chǔ)器相結(jié)合設(shè)計(jì)的新型多功能順時(shí)控制系統(tǒng),不僅簡化了硬件的開發(fā)和制造過程,而且使體積大大減少,提高了系統(tǒng)的可靠性,可同時(shí)控制8路執(zhí)行機(jī)構(gòu)。最為重要的是可以在不修改硬件電路的
基礎(chǔ)上,僅僅通過修改設(shè)計(jì)和對(duì)EPROM重新編程即可實(shí)現(xiàn)不同時(shí)間的控制,實(shí)現(xiàn)簡單,使用靈活方便。









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論