 電子發燒友App
電子發燒友App


這些數據結構都是由Video4Linux支持的,它們的用途如下:
(1)video_capability包含攝像頭的基本信息,例如設備名稱、支持的最大最小分辨率、信號源信息等,分別對應著結構體中成員變量name、maxwidth、maxheight、minwidth、minheight、channels(信號源個數)、type等;
(2)voide_picture包含設備采集圖像的各種屬性,如brightness(亮度)、hue(色調)、contrast(對比度)、whiteness(色度)、depth(深度)等;
(3)video_mmap用于內存映射;
(4)voido_mbuf利用mmap進行映射的幀信息,實際上是輸入到攝像頭存儲器緩沖中的幀信息,包括size(幀的大小)、frames(最多支持的幀數)、offsets(每幀相對基址的偏移)。
系統在采集圖像之前,需要初始化這些數據結構中的參數值,系統才能夠按照要求采集圖像數據。
在USB攝像頭被驅動后,只需要再編寫一個對視頻流采集的應用程序就可以了。根據嵌入式系統開發特征,先在宿主機上編寫應用程序,再使用交叉編譯器進行編譯鏈接,生成在目標平臺的可執行文件。宿主機與目標板通信采用打印終端的方式進行交叉調試,成功后移植到目標平臺。
V4L圖像采集編程流程:
(1)打開視頻設備;
(2)讀取設備信息;
(3)更改設備當前設置;
(4)視頻采集得到圖像信息;
(5)對采集到的圖像進行處理;
(6)關閉視頻設備。
本文編寫采集程序是在安裝Linux操作系統的宿主機PC機上進行的,之后再移植到開發板上。下面是具體論述。
之前我們講到了在V4L中定義的主要數據結構及其功能。對應著這些內容,我們需要對這些數據結構進行定義,以抽象化一個視頻設備。以下是具體的定義內容:

攝像頭、采集圖像和關閉攝像頭的操作。采集程序中定義了如下的函數,以實現前面講到的功能。
intinit_videoIn(structvdIn*vd,char*device,intwidth,intheight,intgrabmethod);初始化攝像頭設備。*vd包含了之前定義的數據結構中的基本信息。另外還要對攝像頭采集圖像的大小、采集模式等參數進行賦值。
intv4lGrab(structvdIn*vd,char*filename);采集圖像主程序。*filename為圖像的文件名,我們可以通過對文件名的設置來確定圖像保存的位置。
intclose_v4l(structvdIn*vd);關閉攝像頭intget_jpegsize(unsignedchar*buf,intinsize);采集圖像的大小。
因為我們是通過調用采集主函數intv4lGrab(structvdIn*vd,char*filename)來實現圖像的采集和保存的,所以需要詳細的講解一下該函數的構成。以下是該函數的具體內容:
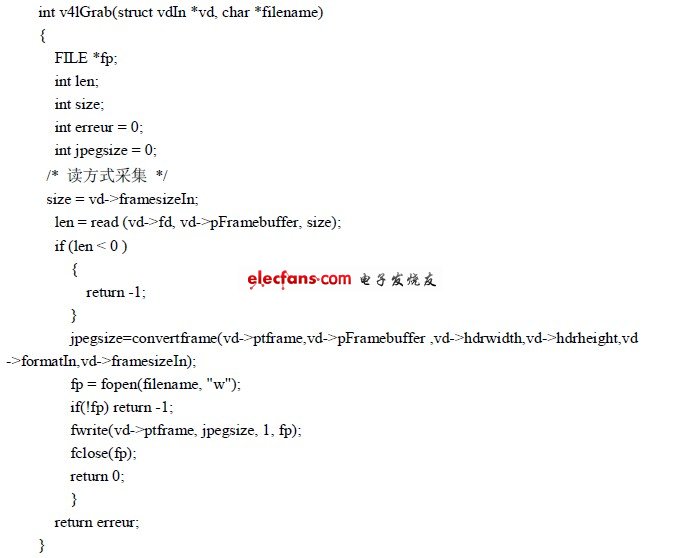
首先,我們需要定義幾個參數,如下:
FILE*fp;定義一個文件類型指針,指向我們采集到的圖像文件intlen;
????? 定義一個整型變量,記錄從內存中讀取的數據量intsize;
????? 定義一個整型變量,指明一幀圖像的數據量interreur=0;定義一個整型變量,指明運行時的錯誤返回值intjpegsize;定義一個整型變量,指明我們需要的圖像大小。
接著我們調用read(vd->fd,vd->pFramebuffer,size)函數,把存放于圖像緩沖區的數據讀入到指定的臨時文件中。之后根據我們對圖像的大小、亮度、對比度等要求轉化之前采集到的圖像數據,最后我們打開一個文件,把圖像數據寫入到該文件中并保存。
4 結論
本文設計了一種嵌入式視頻采集系統,該系統小巧,并且在保證當前信息完整的情況下,盡可能少的占用存儲容量,實現了該系統的圖像采集、存儲和重現功能。在硬件規劃上,采用實用簡單的USB接口通信。且系統中預留了豐富的外設接口,便于今后的擴展升級。









 工商網監
工商網監
評論