本文主要目的就是設計一種基于DSP的模塊化教育機器人硬件系統。該教育機器人是以只能小車為載體TMS320LF2407A微控制器的嵌入式控制平臺及編輯環境的一款開放式的機器人控制系統,以各傳感器模塊
2014-05-14 09:47:40 1930
1930 本文列舉了多核嵌入式系統存在的一些主要局限,并對解決這些局限的可行方案進行了探討。將以一些嵌入式系統為例,指出利用現有架構改進系統節能效果的機遇。多核處理器與新興的嵌入式平臺的結合能夠滿足現代嵌入式
2021-03-09 06:36:52
,應用需要高吞吐量和高能效以及小外形和低成本。多核微控制器單元(MCU)提供了一種可行的新解決方案,利用模塊化設計以經濟的價格提供多倍的性能提升。幾十年來,隨著IC上晶體管數量的增加,芯片性能不斷...
2021-07-19 09:02:45
嵌入式控制器的輸入端口設計分析,不看肯定后悔
2021-05-31 06:19:13
操作和控制。隨著機器人的智能化水平越來越高,控制器要有方便、靈活的操作方式,以及多種形式的控制方式和高度可靠性,還要有很高的實時性。
2020-03-06 07:07:07
隨著科技的進步,機器人技術正在向智能機器和智能系統的方向發展,其發展趨勢主要為結構的模塊化和可重構化;控制技術的開放化、可配置化;伺服驅動技術的數字化和分散化;多傳感器融合技術的實用化。機器人的內涵
2019-08-20 07:21:01
嵌入式多核處理器結構OpenMP并行化優化
2021-03-02 06:59:00
,嵌入式視覺系統也迎來了更多的挑戰,比如功耗、復雜的算法、處理器的性能、更高的圖像分辨率等,人們需要的是更加智能化的系統,嵌入式視覺系統是實現智能化系統重要的組成部分。
2019-08-05 08:17:02
機器狗及1997年美國發射的“索納杰”火星車就是經典的實例。就嵌入式系統的組成、特點,開發所采用的主流軟件平臺、硬件平臺作詳細的介紹,并通過Stewart平臺專用伺服控制器的設計,介紹了嵌入式技術在機電控制系統中的應用及具體實現。?
2019-11-07 07:20:04
隨著人口老齡化進程的加快,更多老年人,尤其是地震和疾病致殘的殘疾人,都需要照顧。基于此,這里提出一種基于ARM的嵌入式服務機器人控制系統設計。該服務機器人的控制系統是機器人的神經中樞,因而其設計是機器人研究的核心。該控制系統通常以MCU、 DSP等為核心,采用上、下位機二級分布式結構。
2019-10-15 08:03:16
實現語音識別和命令生成,通過藍牙無線傳輸至下位機,由下位機中的STM32F103控制器控制機器人完成用戶指令。
研究內容:
隨著微處理器技術的發展與成熟,嵌入式語音識別系統已逐漸成為各領域研究
2022-09-20 15:02:30
、智能手機、教學投影儀、音響系統、雷達系統、路由器等等;前沿嵌入式產品:無人機、智能音響、機器人控制、城市天眼系統、智能家具、自動駕駛汽車、掃地機器人、小米手環等等;一起看一些前沿的嵌入式產品:下面是大疆
2018-12-06 17:38:04
、智能手機、教學投影儀、音響系統、雷達系統、路由器等等;前沿嵌入式產品:無人機、智能音響、機器人控制、城市天眼系統、智能家具、自動駕駛汽車、掃地機器人、小米手環等等;一起看一些前沿的嵌入式產品:大疆無人機
2019-02-11 10:07:57
、游戲機、可穿戴)工業自動化(工業機器人)汽車電子(汽車控制系統、車載定位導航、車載娛樂、自動駕駛系統)航空航天(四軸飛行器、載人飛行器)物聯網(智慧農業、智慧交通、智能家居······)嵌入式發展好,穩定個,但要學的東西也挺多,各位加油。歡迎加群397 164505共同探討嵌入式!
2017-02-22 13:38:36
嵌入式系統設計要求做到可測性、高效性和靈活性。目前,嵌入式系統物理尺寸越來越小,功能越來越復雜。為了方便調試、維護系統,完全可測顯得極為重要。另一方面,模塊化的設計方法越來越引起人們的關注。模塊化
2019-08-23 07:31:35
嵌入式USB主控制器的硬件結構及驅動 嵌入式系統是軟硬件緊密結合的系統。要實現從優盤啟動,硬件上必須在嵌入式微處理器外圍添加USBHOST主控制器;在軟件上必須設計主控制器驅動程序 (HCD)、USB
2011-09-05 11:36:14
的。目前,嵌入式系統在機器人控制系統被廣泛采用。 嵌入式控制器越來越微型化、功能化。微型機器人、特種機器人等也獲得更大的發展機遇,無論從控制系統的結構還是機器人的智能程度方面都得到了很大的提高。以索尼
2018-07-06 11:08:48
度。 2)具有功能很強的存儲區保護功能。這是由于嵌入式系統的軟件結構已模塊化,而為了避免在軟件模塊之間出現錯誤的交叉作用,需要設計強大的存儲區保護功能,同時也有利于軟件診斷。
2019-07-22 07:31:30
什么是嵌入式系統的微模塊化程序設計?嵌入式系統的微模塊化程序設計有何作用?
2021-12-24 06:35:06
(一)嵌入式系統的設計過程1. 設計過程中使用的概念(1)抽象:首先要對每個問題的組件進行抽象。例如,機器人系統問題的抽象可以根據手臂和電機的控制進行。(2)硬件和軟件體系結構:在開始設計之前,必須
2021-11-08 08:13:11
模塊化嵌入式編程中需要對程序進行模塊劃分的"劃"是規劃的意思,意指怎樣合理的將一個很大的軟件劃分為一系列功能獨立的部分合作完成系統的需求。C語言作為一種結構化的程序設計語言,在
2021-12-15 08:51:07
對很多人來,嵌入式軟件開發過程中模塊化(Modularization)是一個海市蜃樓、是一個書面詞匯、是一個過氣的時尚——模塊化似乎從未真正的實現過。吹牛時人們常不屑的說:沒吃...
2021-12-20 07:22:06
今后基于計算機標準總線的運動控制器仍然是市場的主流,但是,基于網絡的嵌入式運動控制器會有較大的發展。基于計算機標準總線的通用運動控制器主要是板卡結構,采用的總線大都為ISA、PCI。由于它們的應用依附于通用PC 計算機平臺,從工業控制的角度分析,這種運動控制器的優缺點如下:
2019-07-23 06:46:17
創新設計:基于慧魚創意組合模型的機器人制作機器人的天空——基于Arduino的機器人制作機器人創意與制作系列機器人設計與控制PIC微控制器應用:PICBasic語言和PICBasic Pro語言編譯
2015-02-22 07:34:56
基于可靠性和安全性的多核片上系統(SoC)架構。因此,嵌入式系統行業似乎將進入兩個關鍵領域:智能和自治。一些感興趣的領域是機器學習和所謂的“物聯網機器人”。在機器...
2021-12-20 06:03:10
什么是PID控制?機器人設計中PID控制的編程方法是什么?
2021-06-30 06:53:20
機器人設計方案{:7:}分享
2014-06-30 13:12:48
模塊化嵌入式機器人控制單元設計,有需要的可以下載。
2022-03-25 10:08:12
設計了一種基于ARM+DSP的嵌入式運動控制器。該控制器將嵌入式CPU與專用運動控制芯片相結合,將運動控制功能以功能模塊的方式嵌入到ARM主控板的架構,把不需要的設備裁減掉,既兼顧功能又節省成本。該
2011-05-04 16:02:55
2010年1月,NI宣布推出LabVIEW Robotics 2009。作為圖形化系統設計(GSD)軟件的新成員,該軟件提供標準的開發平臺用于設計機器人和自主控制系統。NI LabVIEW
2019-05-21 07:40:08
自動或半自動機器人常常需要嵌入式控制系統,從而能夠結合高度智能化的確定性控制,并且可以方便地連接到不同的傳感器和執行器上。NI提供了多種嵌入式硬件平臺,以滿足復雜系統的需求。從尖端的機器人研究項目直至高級行業應用,NI平臺被證實是高效的機器人解決方案。
2019-11-06 07:50:49
軸運動的計算與控制,因此機器人控制器的主控就需要擁有高性能的CPU、內置實時操作系統、支持EtherCAT工業總線以及豐富的功能接口。機器人控制器基于以上需求,飛凌嵌入式推薦使用FET3568J-C
2023-02-27 09:02:22
基于SDRAM控制器實現FPGA模塊化和通用性的解決方案設計
2020-12-22 07:58:55
LabVIEW 與機器人設計
2009-05-30 16:35:13
基礎、機器人本體、電子控制設備、傳感器與導航和機器人電源系統等。《機器人設計與實現》是按照搭積木的方法指導機器人愛好者如何設計、制作機器人平臺,如何賦予機器人智能,使機器人能夠運動、感知周圍的環境和服
2017-08-01 18:21:38
申請理由:本人做嵌入式硬件開發6年,對51,NXP,STM32等控制器較為了解,也有一定的軟件編程能力。使用過Arduino 2560,覺得編程簡單方便,很適合入門,特別是了解到Landzo C1
2016-05-24 16:20:18
項目名稱:基于香橙pi的機器人設計試用計劃:本人擁有香橙pi one的使用經驗,非常熟悉香橙派的使用技巧,希望能夠使用orange pi zero完成一個輪式機器人的設計,使用開發板作為主控,加上6
2016-12-08 16:09:34
STM32單片機IO端口的應用 第3章 STM32單片機程序模塊化設計與機器人運動控制3.1 STM32單片機程序調試方法 3.2 STM32單片機程序模塊化設計 第4章 STM32單片機中斷編程與機器人觸覺
2014-03-13 10:03:30
用模塊。 總起來看,前面提到的無論串行構造還是并行構造的機器人控制器都不是開放式構造,無論從軟件還是硬件都難以擴大和更改,例如,商品化的Mo toman機器人的控制器是不開放的,用戶難以依據本人需求對其修正、擴大功用,通常的做法是對其細致解剖剖析,然后對其改造。
2020-03-27 15:22:31
一、機器人設計理論二、機器人仿真分析基礎機械臂Matlab建模仿真分析基于Matlab 與ADAMS聯合的機器人系統仿真分析三、軟體關節設計軟體機器人關節定量設計常見軟體機器人設計實例四、有限元仿真
2021-09-02 11:17:25
的模塊化零件套裝,包括多種數百個結構零件,一個控制器,多個電機、舵機執行器,多種傳感器,以及電池、電纜等附件。用這些“積木”可以搭建出各種發揮想象力的機器人模型來。所不同的是,“創意之星&
2011-03-05 10:54:52
和一體化NI cRIO-9104可重新配置嵌入式機箱更換了最初的控制器。 蠅控機器人:從蒼蠅到機器人 在實驗裝置(圖2)中,果蠅被用繩拴在一個環形的LED面板陣列的中心。雖然昆蟲不能夠移動,但仍可
2019-04-30 09:40:04
,實現全方位移動的零轉角控制,可以迅速調整機器人的運動狀態。底盤控制系統主要包括:電源模塊、微控制器模塊、電機驅動模塊、DBUS通訊控制模塊等。通過無線遙控器的搖桿可以直接控制機器人前進、后退、左平移
2018-09-04 16:00:33
BACnet網絡體系結構和控制器功能是什么基于嵌入式Linux開發軟件的可行性BACnet控制器軟件怎么實現?
2021-04-28 06:23:04
嵌入式領域。3. 1 uClinux在控制器中的系統定制Linux內核采用模塊化的設計,即有很多功能可以獨立地加上或卸下,在本控制器的要求中突出表現為對網絡服務器功能的實現,故對Linux內核重新
2016-01-16 08:50:10
競賽(FRC)的高中學生提供靈活、功能強大的機器人設計平臺。 The Solution:將配備功能強大的NI LabVIEW圖形化編程軟件的NI CompactRIO嵌入式控制器作為下一代FRC機器人
2019-05-15 09:40:01
請教一下,基于DSP和FPGA的嵌入式控制器該如何去設計?
2021-05-06 09:16:19
PC獨立運行等優勢,得到了高速發展與廣泛應用。本文主要研究基于OMAP平臺的嵌入式運動控制器,為通用嵌入式運動控制器的開發提供一種解決方案。文中首先分析了國內外運動控制器的研究現狀,并對比說明了嵌入式運...
2021-12-24 06:52:02
本文概述了上海交通大學機器人研究所研制的新型遙控移動式排爆機器人PBJ-1的嵌入式控制系統固件的情況。利用嵌入式系統技術開發適合排爆等各類遙控地面移動機器人使用的嵌入式控制系統能夠解決上述種種矛盾。
2021-06-07 06:11:02
題目:基于SLAM的移動機器人設計嵌入式PPT應具有的幾個部分1、有哪些硬件 1)小車 2)STM32F429開發板 3)樹莓派3b+開發板 4)4g通信模塊 5)GPS模塊 6
2021-11-08 06:17:14
通常是基于微控制器(如含集成內存和/或外設接口的中央處理單元)的,但在較復雜的系統中普通微處理器使用外部存儲芯片和外設接口電路。與個人計算機這樣的通用計算機系統不同,嵌入式系統通常執行的是帶有特定要求...
2021-07-30 07:49:06
縮小,本文闡述了一種通用性好、通信性能較強、采用成熟技術、運行穩定安全的模塊化通信系統, 適合大多數機器人應用 , 無論主控制器簡單還是復雜 , 有無操作系統或使用任意一種操作系統 , 只需要使用通用
2018-02-22 10:05:22
的限制,難以獨立運行和小型化。針對這些問題,設計了一種基于ARM+DSP的嵌入式運動控制器。該控制器將嵌入式CPU與專用運動控制芯片相結合,將運動控制功能以功能模塊的方式嵌入到ARM主控板的架構,把
2019-07-31 07:52:19
計算量增大,一般的單片機等處理器很難完成控制要求。而基于ARM的嵌入式服務機器人的控制器采用分層與模塊化結構,充分體現可擴展性、可移植性的設計原則.同時具有低成本、低功耗、體積小巧、可靠性高、智能化高以及通用性等特點。那么我們具體該 如何利用ARM研究嵌入式服務機器人控制器呢?
2019-07-30 07:02:31
一種基于OHCI的嵌入式USB主機控制器接口實現
2021-06-02 06:50:43
CompactRIO嵌入式硬件平臺用于FIRST項目中的機器人自主控制系統開發;TORC科技公司從傳統的編程工具轉而使用NI LabVIEW軟件平臺設計其復雜的自主系統,其CEO Michael Fleming
2019-07-31 07:17:18
目錄介紹一、底盤主控板二、嵌入式開發板1. 與上位機pc的關系2. 與STM32主控板的關系介紹自下而上的分析實體機器人(差分輪速機器人)搭建中的關鍵過程。一、底盤主控板本部分搭建實體機器人ros
2022-01-20 07:36:08
性能與可靠的機械控制性能的同時保證,才能在短時間內準確尋找到火源并滅火回家。在此以ARM9處理器為核心,對基于嵌入式系統的智能滅火機器人進行了設計。本文將從硬件和軟件方面講述智能滅火機器人控制器的實現方法,并且給出了機器人滅火的具體實驗,驗證了方案的可行性,為智能滅火機器人的進一步研究提供了平臺。
2019-07-31 06:23:18
今天,機器人正被應用于那些先前不曾使用機器人的生產領域。針對不同的情況,必須始終分別考慮各個安全方面并針對每種應用實施合適的安全解決方案。安全的傳感器技術舉足輕重:為了滿足所有安全相關的應用,需要采用滿足傳感器需要的模塊化方法。
2020-05-07 08:16:08
[本系列文章還將陸續介紹其他的傳感器模塊,歡迎訂閱我的博客] 本次所介紹的是伺服電機模塊,主要參考《基于ARM Cortex-M3的STM32系列嵌入式微控制器應用實踐》內的對機器人的伺服電機模塊
2021-06-28 08:36:59
小白求助,求基于嵌入式處理器S3C2440為核心的多任務機器人控制系統
2021-10-21 08:28:01
工業機器人控制器功能多任務功能一臺機器人可進行多個任務的操作;
2019-09-12 09:10:22
ZNT-MK01工業機器人模塊化教學工作站是什么?ZNT-MK01工業機器人模塊化教學工作站有哪些技術性能?
2021-09-28 07:35:14
模塊化的控制系統體系結構:采用分布式CPU計算機結構,分為機器人控制器(RC),運動控制器(MC),光電隔離I/O控制板、傳感器處理板和編程示教盒等。機器人控制器(RC)和編程示教盒通過串口/CAN總線
2018-11-23 10:40:38
微控制器技術現狀智能化、互聯網、物聯網和云計算讓控制器(MCU)無處不在MCU8/16/32的位數界限變得模糊MCU與嵌入式處理器界限變得模糊MCU開放核心與專有核心之爭激烈MCU的SoC化是發展趨勢MCU的部分軟件功能硬件化
2011-03-08 16:33:28
工作要求:1.正規院校本科以上學歷,計算機/自動化/機器人相關專業;2.3年以上嵌入式軟件開發工程師相關工作經驗;3.精通C語言;4.熟悉STM32單片機5.具備優秀的調試能力,能綜合利用各種軟硬件
2018-05-12 14:08:45
基于無線通信的嵌入式機器人控制系統電路設計
2020-03-05 08:31:57
嵌入式遠程控制器的硬件電路是由哪些部分組成的?怎樣去設計嵌入式遠程控制器的軟件部分?
2021-06-04 06:08:46
軸運動的計算與控制,因此機器人控制器的主控就需要擁有高性能的CPU 、內置實時操作系統、支持 EtherCAT工業總線以及豐富的功能接口。機器人控制器基于以上需求,飛凌嵌入式
2023-02-17 16:03:26
混合信號微控制器是怎樣提升車用嵌入式系統的?
2021-05-14 07:13:01
和Zigbee通訊模塊,并能夠擴展其它智能傳感器。所有機器人通過一個由Arduino控制器組成的協調器進行協同控制,既可嵌入式獨立運行,也可以通過USB 接口連接到PC 進行控制。套件可以作為工程訓練
2016-03-24 11:36:19
以太網控制器的總體結構有哪些模塊?MAC發送模塊是由哪些部分組成的?MAC接收模塊是由哪些部分組成的?MAC還有哪些其它的模塊?如何通過FPGA去設計嵌入式以太網控制器?
2021-04-14 06:09:08
的能力。紅外模塊可以實現對一些外部電器的操控,電池和電池管理模塊給整個機器人的運轉提供能量。辰漢-硬件結構是實現服務機器人運算和控制的基礎,在高性能嵌入式處理器上運行的操作系統,進行著服務機器人具體
2017-06-09 17:18:49
嵌入式推薦使用FET3568J-C工業級核心板作為機器人控制器的主控平臺。 01 高性能處理器 飛凌嵌入式FET3568J-C核心板基于瑞芯微RK3568J工業級處理器設計開發,四核64位
2023-02-24 17:05:21
本文針對地面移動機器人,在CAN總線的基礎上,設計了一種模塊化的控制器結構。這種設計具有可靠性強、擴展性好等特點。實際應用證明了該設計的可行性。關鍵詞:模塊化;
2009-05-25 11:22:11 30
30 本文針對地面移動機器人,在CAN總線的基礎上,設計了一種模塊化的控制器結構。這種設計具有可靠性強、擴展性好等特點。實際應用證明了該設計的可行性。
2010-03-02 16:24:0312 本文針對地面移動機器人,在CAN總線的基礎上,設計了一種模塊化的控制器結構。這種設計具有可靠性強、擴展性好等特點。實際應用證明了該設計的可行性
2010-06-23 15:23:4117 服務機器人控制系統是機器人的神經中樞,它決定機器人能否按照用戶要求順利完成相應工作任務。這里提出一種基于ARM和μC/OS-II的服務機器人控制系統,給出嵌入式服務機器人控
2010-12-28 16:41:5942 一種嵌入式智能尋跡機器人設計
1 引言
在信息技術的飛速發展,計算機,通訊、消費電子三種技術合一的后PC的時代,雖然計算機和網絡已經全面滲透到日
2009-12-25 17:49:50562 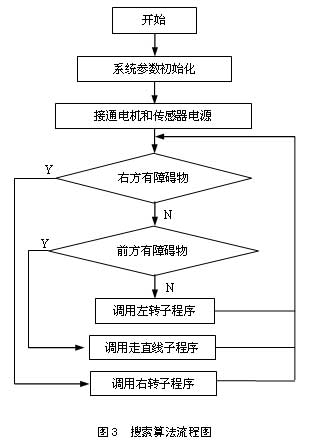
嵌入式系統設計者面臨著不斷增長的性能需求和更快的市場需求。嵌入式處理器需要執行擴展的任務集,通常是實時的。同時,應用要求高吞吐量和節能,加上外形小、成本低。多核微控制器單元(MCU)提供了一個可行的新的解決方案,利用模塊化設計,以經濟的價格提供多種性能的提高。
2017-07-20 09:46:125 ARM嵌入式系統的擬人機器人控制器的設計
2017-10-16 08:29:1912 針對松下A5N驅動器,采用嵌入式構架以及網絡通信模式,提出了基于模塊化控制核心(ARM+ FPCA)適應新型實時性網絡通信RTEX的多軸嵌入式運動控制器硬件平臺的設計方案,并移入實時多任務操作系統
2018-02-08 17:22:092 為了實現機器人激光測距控制器攜帶方便、控制效果好、成本低以及可靠性強的優勢,設計基于嵌入式技術的機器人激光測距控制器,其由上機位和下機位兩部分組成。上機位對下機位的數據進行顯示、分析和管理,由激光
2018-02-12 15:54:091 嵌入式系統設計人員面臨著對更高性能和更快上市時間的不斷增長的需求。嵌入式處理器需要經常實時地執行不斷擴展的任務。同時,應用需要高吞吐量和高能效以及小外形和低成本。多核微控制器單元(MCU)提供了一種可行的新解決方案,利用模塊化設計以經濟的價格提供多倍的性能提升。
2019-03-27 08:32:004325 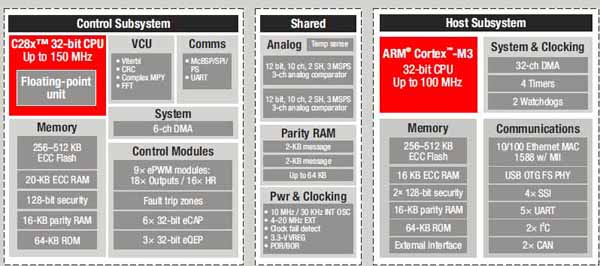
 電子發燒友App
電子發燒友App












 工商網監
工商網監
評論