 電子發燒友App
電子發燒友App


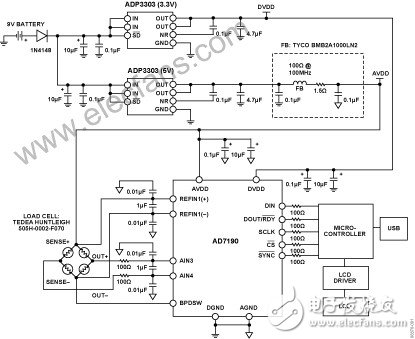
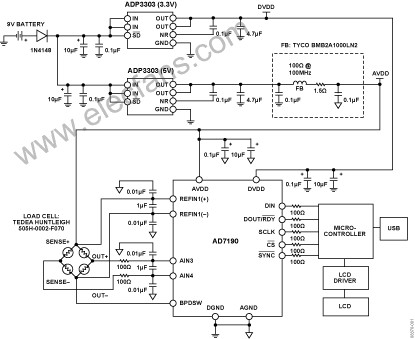
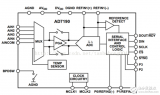
AD7190是一款適合高精密測量應用的低噪聲完整模擬前端。它集成一個低噪聲、24位Σ-Δ型模數轉換器(ADC)。片內低噪聲增益級意味著可直接輸入小信號。
AD7190保持了完整的輸出數據率范圍從4.7赫茲的良好表現,至4.8千赫,這使得它能夠被用來在權衡,在更高的速度隨著經營規模的低速稱重系統,如圖
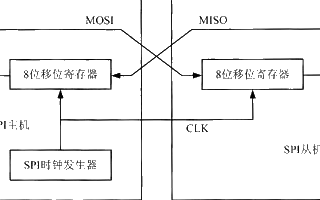
因為為STM32硬件SP1只支持單次8/16位數據傳輸,而寄存器有時需要8、24、32傳輸。所以可以不關閉使能多次傳輸,來達到多數據傳輸目的。
測試過程
以下是測試時,用邏輯分析儀截取的讀取數據狀態寄存器的數據(連續讀取不需要關閉使能,這里關閉了)。
前24位為轉換數據,后8位為狀態寄存器數據。
因為傳感器是斜放在桌面上,數據會大于配置計算出的數據
數據轉換
數據輸出編碼
當ADC配置為單極性工作模式時,輸出碼為自然(直線)二進制式,零差分輸入電壓對應的碼為00.。.00,中間電平電壓對應的碼為100.。.000,滿量程輸入電壓對應的碼為111.。.111。任意模擬輸入電壓的輸出碼可以表示為:
當ADC配置為雙極性工作模式時,輸出碼為偏移二進制式,負滿量程電壓對應的碼為000.。.000,零差分輸入電壓對應的碼為100.。.000,正滿量程輸入電壓對應的碼為111.。.111。任意模擬輸入電壓的輸出碼可以表示為:
輸出碼 = 2N– 1× [(AIN× gain/VREF) + 1]
其中:
AIN為模擬輸入電壓。
gain為PGA增益設置(1至128)。
N = 24。
根據配置情況,我們的到的輸出數據為第二個公式所得的輸出碼。
十進制:8388609。所測物體重量=讀取數據-輸出碼數據
程序源碼
讀寫函數參照官方例程,本例程使用普通GPIO模擬SPI。硬件SPI部分代碼僅為使用硬件SPI的朋友參考。
代碼片段
#define CS_ON() GPIO_ResetBits(GPIOD,GPIO_Pin_8)
#define CS_OFF() GPIO_SetBits(GPIOD,GPIO_Pin_8)
#define SCLK_LOW() GPIO_ResetBits(GPIOD,GPIO_Pin_9)
#define SCLK_HIGH() GPIO_SetBits(GPIOD,GPIO_Pin_9)
#define MOSI_LOW() GPIO_ResetBits(GPIOD,GPIO_Pin_10)
#define MOSI_HIGH() GPIO_SetBits(GPIOD,GPIO_Pin_10)
u8 buf[4] ={0,0,0,0};//數據緩沖
//u8 BUF_Data[3] ={0,0,0};
GPIO配置
voidAD7190_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOD,ENABLE); //使能PD口時鐘
GPIO_InitStructure.GPIO_Pin =GPIO_Pin_8|GPIO_Pin_9|GPIO_Pin_10;//CS,CLK,MOSI端口配置
GPIO_InitStructure.GPIO_Mode =GPIO_Mode_Out_PP; //推挽輸出
GPIO_InitStructure.GPIO_Speed =GPIO_Speed_50MHz; //IO口速度為50MHz
GPIO_Init(GPIOD, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin =GPIO_Pin_11; //MISO
GPIO_InitStructure.GPIO_Mode =GPIO_Mode_IN_FLOATING; //浮空輸入
GPIO_InitStructure.GPIO_Speed =GPIO_Speed_50MHz; //IO口速度為50MHz
GPIO_Init(GPIOD,&GPIO_InitStructure);
CS_OFF(); //關閉使能
}
讀取函數
void AD7190_Read(u8count,u8 *buf)
{
u8 i=0,j=0;
u8 Read_Data = 0;
u8 Temp = 0;
SCLK_HIGH();
// AD7190_delay(1);
CS_OFF();
// AD7190_delay(1);
CS_ON();
// AD7190_delay(1);
for(j = count;j》0;j--)
{
for(i = 0;i《8;i++)
{
SCLK_LOW();
Read_Data《《=1;
// AD7190_delay(1);
Temp =GPIO_ReadInputDataBit(GPIOD,GPIO_Pin_11);
SCLK_HIGH();
if(Temp == 1)
{
Read_Data|= 1;
}else
{
Read_Data|=0;
}
// AD7190_delay(1);
}
*(buf + j - 1) = Read_Data;
}
CS_OFF();
}
寫入函數
voidAD7190_Write(u8 count,u8 *buf)
{
u8 i=0,j=0;
u8 Write_Data = 0;
SCLK_HIGH();
// AD7190_delay(1);
CS_OFF();
// AD7190_delay(1);
CS_ON();
// AD7190_delay(1);
for(i = count;i 》0;i--)
{
Write_Data = *(buf + i - 1);
for(j = 0;j 《8 ;j++)
{
SCLK_LOW();
if(0x80 ==(Write_Data & 0x80))
{
MOSI_HIGH();
}else
{
MOSI_LOW();
}
// AD7190_delay(1);
SCLK_HIGH();
// AD7190_delay(1);
Write_Data 《《=1;
}
}
CS_OFF();
}
初始化
voidAD7190_Init(void)
{
//復位
buf[2] = 0xff;
buf[1] = 0xff;
buf[0] = 0xff;
AD7190_Write(3,buf);
AD7190_Write(3,buf);
AD7190_Write(3,buf);
// //讀默認數據寄存器
// buf[0] = 0x58;
// AD7190_Write(1,buf);
// AD7190_Read(3,buf);
// printf(“AD7190數據寄存器:%x_%x_%x ”,buf[2],buf[1],buf[0]);
// //讀模式寄存器
// buf[0] = 0x48;
// AD7190_Write(1,buf);
// AD7190_Read(3,buf);
// printf(“AD7190數據:%x_%x_%x ”,buf[2],buf[1],buf[0]);
// //讀配置寄存器
// buf[0] = 0x50;
// AD7190_Write(1,buf);
// AD7190_Read(3,buf);
// printf(“AD7190數據:%x_%x_%x ”,buf[2],buf[1],buf[0]);
//設置配置寄存器
buf[0] = 0x10;
AD7190_Write(1,buf);
buf[2] = 0x00;
buf[1] = 0x03;
buf[0] = 0x00;
AD7190_Write(3,buf);
//設置模式寄存器
buf[0] = 0x08;
AD7190_Write(1,buf);
buf[2] = 0x18;
buf[1] = 0x03;
buf[0] = 0xff;
AD7190_Write(3,buf);
// //讀模式寄存器
// buf[0] = 0x48;
// AD7190_Write(1,buf);
// AD7190_Read(3,buf);
// printf(“AD7190模式數據:%x_%x_%x ”,buf[2],buf[1],buf[0]);
// //讀配置寄存器
// buf[0] = 0x50;
// AD7190_Write(1,buf);
// AD7190_Read(3,buf);
// printf(“AD7190配置數據:%x_%x_%x ”,buf[2],buf[1],buf[0]);
// buf[0] = 0x40;
// AD7190_Write(1,buf);
// AD7190_Read(1,buf);
// printf(“AD7190狀態寄存器:%x ”,buf[0]);
buf[0] = 0x5c;
AD7190_Write(1,buf);
printf(“串口測試 ”);
// buf[0] = 0x10;
// AD7190_Write(1,buf);
// BUF_Data[0] = 0x10;
// SPI_SendByte(1,BUF_Data);
// buf[2]= 0x80;
// buf[1]= 0x0f;
// buf[0]= 0x00;
// AD7190_Write(3,buf);
// BUF_Data[2] = 0x00;
// BUF_Data[1] = 0x01;
// BUF_Data[0] = 0x08;
// SPI_SendByte(3,BUF_Data);
// buf[0]= 0x08;
// AD7190_Write(1,buf);
// BUF_Data[0] = 0x08;
// SPI_SendByte(1,BUF_Data);
// buf[2]= 0x08;
// buf[1]= 0x03;
// buf[0]= 0xff;
// AD7190_Write(3,buf);
// BUF_Data[2] = 0x08;
// BUF_Data[1] = 0x03;
// BUF_Data[0] = 0xff;
// SPI_SendByte(3,BUF_Data);
// buf[0]= 0x50;
// AD7190_Write(1,buf);
// AD7190_Read(3,buf);
// printf(“AD7190配置寄存器數據:%d%d%d ”,buf[0],buf[1],buf[2]);
// buf[0]= 0x5C;
// AD7190_Write(1,buf);
// AD7190_Read(3,buf);
//獲得數據
// AD7190_Read(3,buf);
// printf(“AD7190數據:%d.%d.%d. ”,buf[0],buf[1],buf[2]);
// AD7190_Read(1);
}
任務,如果沒系統直接將while內容寫入main函數while即可
void AD7190_DATA_task(void*p_arg)
{
OS_ERR err;
p_arg = p_arg;
while(1)
{
GPIO_SetBits(GPIOB,GPIO_Pin_5);
OSTimeDly(10,OS_OPT_TIME_TIMEOUT,&err);
if(GPIO_ReadOutputDataBit(GPIOD,GPIO_Pin_11)== 0)
{
//獲得數據
AD7190_Read(4,buf);
printf(“AD7190數據:%x_%x_%x_%x ”,buf[3],buf[2],buf[1],buf[0]);
}
GPIO_ResetBits(GPIOB,GPIO_Pin_5);
OSTimeDly(10,OS_OPT_TIME_TIMEOUT,&err);
}
}
硬件SPI1
voidSPI_Configuration(void)
{
SPI_InitTypeDef SPI_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1,ENABLE);
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_5|GPIO_Pin_6|GPIO_Pin_7;//SCLK,MISO,MOSI
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_Init(GPIOA,&GPIO_InitStructure);
SPI_InitStructure.SPI_Direction=SPI_Direction_2Lines_FullDuplex;
SPI_InitStructure.SPI_Mode=SPI_Mode_Master;
SPI_InitStructure.SPI_DataSize=SPI_DataSize_8b;
SPI_InitStructure.SPI_CPOL=SPI_CPOL_High;
SPI_InitStructure.SPI_CPHA=SPI_CPHA_2Edge;
SPI_InitStructure.SPI_NSS=SPI_NSS_Soft;
SPI_InitStructure.SPI_BaudRatePrescaler=SPI_BaudRatePrescaler_8;
SPI_InitStructure.SPI_FirstBit=SPI_FirstBit_MSB;
SPI_InitStructure.SPI_CRCPolynomial =7;
SPI_Init(SPI1,&SPI_InitStructure);
SPI_Cmd(SPI1,ENABLE); //使能SPI
}
硬件SPI1讀寫
用如下,使用時自己封裝成函數即可(程序開始時已經開啟SPI使能,這里不需要控制):
void SPI1_Send_ReveiceFull(u8 * data,u8 len)
{
u8 temp,i;
// CS_ON1();
for(i = 0;i 《 len;i++)
{
while(SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_TXE)==RESET);
SPI_I2S_SendData(SPI1,*(data + i));
while(SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_RXNE)==RESET);
temp = SPI_I2S_ReceiveData(SPI1);
*(AD7190_TempData.AD71901_ReveiceData + len - i - 1 ) = temp;
}
// CS_OFF1();
}
AD7190芯片初始化(僅供參考)
void AD71901Init(void)
{
u8 i;
for(i = 0 ;i 《 4;i ++)
{
AD7190_TempData.AD7190_SendData[i] = 0xff;
}
SPI1_Send_ReveiceFull(AD7190_TempData.AD7190_SendData,4);
SPI1_Send_ReveiceFull(AD7190_TempData.AD7190_SendData,1);
for(i = 0 ;i 《 4;i ++)
{
AD7190_TempData.AD7190_SendData[i] = 0x00;
}
delay_us(700);
//讀模式寄存器
AD7190_TempData.AD7190_SendData[0] = 0x48;
SPI1_Send_ReveiceFull(AD7190_TempData.AD7190_SendData,1);
for(i = 0 ;i 《 4;i ++)
{
AD7190_TempData.AD7190_SendData[i] = 0x00;
}
SPI1_Send_ReveiceFull(AD7190_TempData.AD7190_SendData,3);
// printf(“AD71901數據:%x_%x_%x ”,AD7190_TempData.AD71901_ReveiceData[3] + buf[2],buf[1],buf[0]);
//讀配置寄存器
AD7190_TempData.AD7190_SendData[0] = 0x50;
SPI1_Send_ReveiceFull(AD7190_TempData.AD7190_SendData,1);
for(i = 0 ;i 《 4;i ++)
{
AD7190_TempData.AD7190_SendData[i] = 0x00;
}
SPI1_Send_ReveiceFull(AD7190_TempData.AD7190_SendData,3);
// printf(“AD7190數據1:%x_%x_%x ”,buf[2],buf[1],buf[0]);
AD7190_TempData.AD7190_SendData[0] = 0x10;
SPI1_Send_ReveiceFull(AD7190_TempData.AD7190_SendData,1);
// SPI2_Send_ReveiceFull(AD7190_TempData.AD7190_SendData,1);
AD7190_TempData.AD7190_SendData[0] = 0;
AD7190_TempData.AD7190_SendData[1] = 0x03;
AD7190_TempData.AD7190_SendData[2] = 0;
SPI1_Send_ReveiceFull(AD7190_TempData.AD7190_SendData,3);
// SPI2_Send_ReveiceFull(AD7190_TempData.AD7190_SendData,3);
//設置模式寄存器
AD7190_TempData.AD7190_SendData[0] = 0x08;
SPI1_Send_ReveiceFull(AD7190_TempData.AD7190_SendData,1);
// SPI2_Send_ReveiceFull(AD7190_TempData.AD7190_SendData,1);
AD7190_TempData.AD7190_SendData[0] = 0x18;
AD7190_TempData.AD7190_SendData[1] = 0x00;
AD7190_TempData.AD7190_SendData[2] = 0x01;
SPI1_Send_ReveiceFull(AD7190_TempData.AD7190_SendData,3);
// SPI2_Send_ReveiceFull(AD7190_TempData.AD7190_SendData,3);
//讀模式寄存器
AD7190_TempData.AD7190_SendData[0] = 0x48;
SPI1_Send_ReveiceFull(AD7190_TempData.AD7190_SendData,1);
// buf[0] = 0x48;
for(i = 0 ;i 《 4;i ++)
{
AD7190_TempData.AD7190_SendData[i] = 0x00;
}
SPI1_Send_ReveiceFull(AD7190_TempData.AD7190_SendData,3);
// printf(“AD7190數據1:%x_%x_%x ”,buf[2],buf[1],buf[0]);
//讀配置寄存器
AD7190_TempData.AD7190_SendData[0] = 0x50;
SPI1_Send_ReveiceFull(AD7190_TempData.AD7190_SendData,1);
for(i = 0 ;i 《 4;i ++)
{
AD7190_TempData.AD7190_SendData[i] = 0x00;
}
SPI1_Send_ReveiceFull(AD7190_TempData.AD7190_SendData,3);
// printf(“AD7190數據1:%x_%x_%x ”,buf[2],buf[1],buf[0]);
AD7190_TempData.AD7190_SendData[0] = 0x5c;
SPI1_Send_ReveiceFull(AD7190_TempData.AD7190_SendData,1);
// SPI2_Send_ReveiceFull(AD7190_TempData.AD7190_SendData,1);
for(i = 0 ;i 《 4;i ++)
{
AD7190_TempData.AD7190_SendData[i] = 0x00;
}
}










 工商網監
工商網監
評論