 電子發(fā)燒友App
電子發(fā)燒友App


一種以ARM處理器為核心的汽車尾氣遙測(cè)儀的設(shè)計(jì)。對(duì)該遙測(cè)儀的工作原理、系統(tǒng)設(shè)計(jì)與嵌入式軟硬件實(shí)現(xiàn)作了較詳細(xì)的分析。實(shí)踐表明,該系統(tǒng)在性價(jià)比、響應(yīng)速度、可攜帶性及功耗等方面均有明顯優(yōu)勢(shì)。
汽車行駛時(shí)排出的大量有害廢氣是污染大氣環(huán)境的主要流動(dòng)污染源,占城市大氣污染的50%~80%。汽車尾氣監(jiān)測(cè)是大氣污染監(jiān)測(cè)的重要組成部分。目前應(yīng)用的監(jiān)測(cè)方法中,以氣體吸收光譜為理論背景的檢測(cè)手段應(yīng)用最多。其主要過程是:將可調(diào)諧激光二極管激光(TDL)的發(fā)射波長(zhǎng)調(diào)整至被測(cè)氣體某一吸收譜線,激光經(jīng)過氣體時(shí)被部分吸收,通過檢測(cè)光強(qiáng)的變化,即可計(jì)算出氣體的濃度。采用可調(diào)諧激光二極管氣體吸收光譜學(xué)(TDLAS)監(jiān)測(cè)技術(shù)的優(yōu)點(diǎn)是:能快速掃描各種目標(biāo)氣體濃度,實(shí)現(xiàn)實(shí)時(shí)快速非接觸多種氣體的自動(dòng)監(jiān)測(cè);靈敏度高,選取較強(qiáng)的吸收譜線,可以測(cè)出低于1ppb的濃度;遙感測(cè)量距離可以從幾米到數(shù)公里,無需多點(diǎn)采樣,就可以測(cè)出一個(gè)區(qū)域的平均污染程度;壽命長(zhǎng),無耗材,系統(tǒng)易于更新維護(hù)。激光檢測(cè)可以極大提高尾氣監(jiān)測(cè)工作效率,快速獲取城市機(jī)動(dòng)車尾氣排放數(shù)據(jù),為政府決策提供依據(jù)。
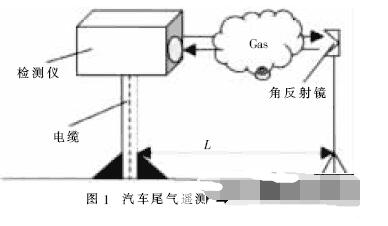
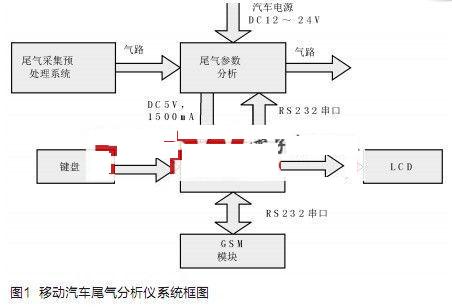
TDLAS因具有上述優(yōu)點(diǎn)而得到了廣泛的應(yīng)用。近幾年,TDLAS檢測(cè)系統(tǒng)向低成本、低功耗、體積小的方向發(fā)展,將原有的基于工業(yè)控制計(jì)算機(jī)的遙測(cè)系統(tǒng)轉(zhuǎn)變?yōu)楸銛y式是目前應(yīng)用的迫切需求。在改造機(jī)型的過程中,本文提出一種基于ARM處理器的CO和CO2遙測(cè)儀,其使用方便、體積小、功耗低,適合室外無人值守使用。汽車尾氣遙測(cè)儀如圖1所示。
1 二次諧波測(cè)量原理
簡(jiǎn)單地用檢測(cè)光強(qiáng)變化測(cè)量氣體濃度,會(huì)因?yàn)槠渌麣怏w、塵埃的吸收而受到干擾。在實(shí)踐中,更多地運(yùn)用二次諧波測(cè)量法。
1.1 接收信號(hào)中的頻譜
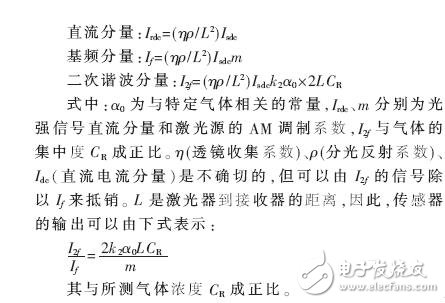
二次諧波光譜檢測(cè)氣體的方法,可以排除很強(qiáng)的干擾信號(hào),且所得檢測(cè)的污染物濃度與二次諧波的信號(hào)成正比。對(duì)發(fā)射激光進(jìn)行頻率為f的信號(hào)調(diào)制,經(jīng)被測(cè)氣體后,氣體產(chǎn)生非線性吸收,在所接收光強(qiáng)信號(hào)中(經(jīng)傅立葉變換)有以下表達(dá)式成立:
1.2 基頻及二次諧波信號(hào)的提取
用鎖相放大器能夠提取上述信號(hào),其原理如圖2所示。
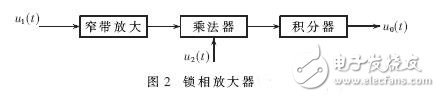
圖2中u1(t)是激光光電轉(zhuǎn)換器輸出的信號(hào),若輸入u2(t)是本地正弦調(diào)制信號(hào),頻率為f,則經(jīng)過鎖相放大器后的輸出u0(t)為基頻分量If;若u2(t)是本地正弦調(diào)制信號(hào)的二倍頻,即頻率為2f,則經(jīng)過鎖相放大器后的輸出u0(t)為二次諧波分量I2f。證明如下:
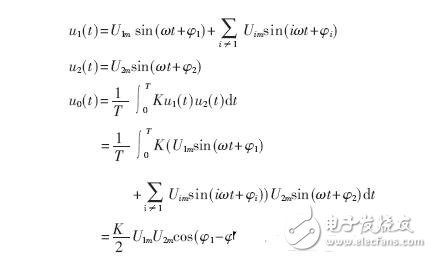
其中:K(系統(tǒng)增益)、cos(φ1-φ2)、U2m(參考信號(hào)幅值)均為固定值。顯然,鎖定放大器輸出一個(gè)與被測(cè)信號(hào)幅值U1m成正比的直流電壓,同時(shí)抑制了絕大部分的噪聲。
2 系統(tǒng)構(gòu)建
依據(jù)上述理論設(shè)計(jì)了以ARM處理器為核心的硬件電路,如圖3所示。
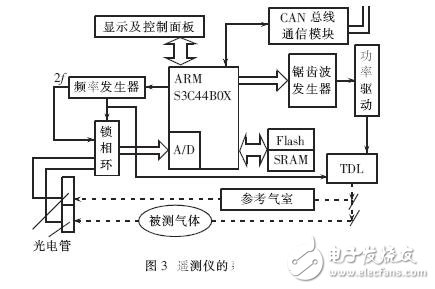
2.1 系統(tǒng)硬件設(shè)計(jì)
在硬件結(jié)構(gòu)上,系統(tǒng)分為激光調(diào)制電路、模擬信號(hào)采集、數(shù)據(jù)處理單元、通信等模塊。
2.1.1 激光調(diào)制電路
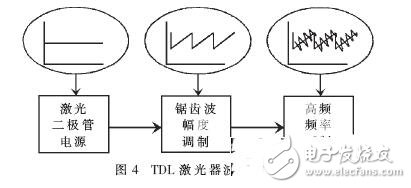
為了掃描CO和CO2的吸收譜線,需對(duì)TDL的波長(zhǎng)進(jìn)行調(diào)節(jié)(CO檢測(cè)波長(zhǎng)為1579.737nm,取鄰近的1579.574nm作為CO2的檢測(cè)工作波長(zhǎng))。
TDL激光器有溫度調(diào)節(jié)、電流調(diào)節(jié)兩種主要的波長(zhǎng)調(diào)節(jié)方法。本設(shè)計(jì)的電流調(diào)節(jié)相對(duì)于溫度調(diào)節(jié)具有線性好、可調(diào)節(jié)性好、掃描速度快的特點(diǎn),因此采用室溫溫度調(diào)制TDL注入電流的方案。在室溫變化的范圍內(nèi),始終以參考?xì)馐医o出的最大信號(hào)為準(zhǔn),避免了溫度造成的影響。調(diào)制電流分為兩個(gè)階段:(1)直流電被調(diào)制成鋸齒形電流,用于掃描CO和CO2的吸收譜線;(2)在鋸齒波電流的基礎(chǔ)上再疊加波譜調(diào)頻。如圖4所示。
此電流注入TDL轉(zhuǎn)化為被調(diào)制激光輸出,激光經(jīng)過被測(cè)氣體,經(jīng)反射鏡被透鏡收集在InGaAs PIN光電管位置上(如圖1)。光電管把接收到的攜帶氣體濃度等信息的光信號(hào)轉(zhuǎn)換為電信號(hào)。后繼信號(hào)經(jīng)鎖相放大、防混疊濾波、A/D轉(zhuǎn)換、數(shù)字信號(hào)處理,分別解讀出CO、CO2的濃度信息。
2.1.2 模擬信號(hào)采集
為了獲得極強(qiáng)的抗噪聲性能和極高的放大倍數(shù),模擬電路主要由起頻率選擇放大功能的鎖相環(huán)組成,參考頻率分別為f=5Hz和2f=10kHz。鎖相放大器電路采用互相關(guān)檢測(cè)設(shè)計(jì),由一個(gè)乘法器與一個(gè)低通濾波器組成(低通濾波器相當(dāng)于積分器),它直接測(cè)出淹沒在噪聲中的調(diào)幅信號(hào),輸出一個(gè)與被測(cè)信號(hào)成正比的直流電壓,相敏檢波器采用高精度同步解調(diào)器AD630。在電路中,AD630相當(dāng)于模擬乘法器,將諧波信號(hào)與參考信號(hào)相乘,從含有噪聲的調(diào)幅波中精密檢出被調(diào)制的信號(hào)。
系統(tǒng)使用兩路鎖相放大器,如前所述,分別檢測(cè)基頻分量獲取二次諧波信號(hào)。2f信號(hào)在吸收中心具有最大值,需將調(diào)制頻率鎖定到吸收峰處以獲得最大的靈敏度。這可由調(diào)節(jié)鋸齒波偏置電流實(shí)現(xiàn),反饋通過參考?xì)怏w室光路的信號(hào)采集實(shí)現(xiàn)(參考?xì)馐覛怏w由20% CO、20%CO2和60%N2組成,當(dāng)參考信號(hào)最大時(shí)開始檢測(cè),以達(dá)到更高的靈敏度)。
2.1.3 數(shù)據(jù)處理單元
中央處理單元采用基于ARM7TDMI-S內(nèi)核的低功耗ARM處理器S3C44B0X,它是三星公司專為手持設(shè)備和一般應(yīng)用提供的高性價(jià)比的微控制器解決方案。S3C44B0X具有ARM處理器的所有優(yōu)點(diǎn):低功耗、高性能;同時(shí)又具有豐富的片上資源,非常適合嵌入式產(chǎn)品的開發(fā)。它支持軟件使能休眠模式,適合以電池為電源的設(shè)備。內(nèi)部集成了8路10位的A/D控制器,可以精確測(cè)出傳感器的信號(hào),在本系統(tǒng)中分別應(yīng)用于鎖相放大器1、2的Pf、P2f信號(hào)、溫度檢測(cè)、觸模屏輸出及電源電壓檢測(cè)。
S3C44B0X集成了LCD控制器,可以將顯示緩存中的數(shù)據(jù)傳送到外部的LCD驅(qū)動(dòng)電路中。本設(shè)計(jì)支持單色4級(jí)灰度、320×240分辨率的SYM320240C顯示,并且通過S3C44B0X RS-232串口接無線收發(fā)模塊與上位機(jī)通信。使用該處理器眾多功能模塊使得本系統(tǒng)結(jié)構(gòu)緊湊,減少了系統(tǒng)的復(fù)雜度。
2.1.4 通信模塊
由于汽車尾氣檢測(cè)場(chǎng)地一般選擇在邊遠(yuǎn)郊區(qū),在汽車發(fā)動(dòng)機(jī)電磁干擾下,無線發(fā)射設(shè)備通常不能滿足要求,所以使用CAN總線與上位機(jī)通信,將實(shí)時(shí)采集的數(shù)據(jù)傳送到數(shù)據(jù)中心。CAN總線是現(xiàn)場(chǎng)總線中的應(yīng)用熱點(diǎn),其通信速率高、開放性好、通信距離長(zhǎng)(10km),具有多主站運(yùn)行和分散仲裁的串行總線以及廣播通信的特點(diǎn)。另外,采用CAN總線是因?yàn)槠渌囄矚鈾z測(cè)模塊,如牌照識(shí)別、速度、加速度測(cè)量等均使用CAN與上位機(jī)通信。
2.2 操作系統(tǒng)與應(yīng)用程序
由于本系統(tǒng)應(yīng)用尚處于完善階段,任務(wù)多、實(shí)時(shí)性要求高,且硬件配置有所限制,在比較當(dāng)前流行的實(shí)時(shí)操作系統(tǒng)的硬件需求、資源獲取難易程度后,選用了嵌入式實(shí)時(shí)多任務(wù)操作系統(tǒng)μC/OS-II及圖形界面μC/GUI。μC/OS-II是一個(gè)源代碼公開、可移植、可固化、可剪裁、占先式的實(shí)時(shí)多任務(wù)操作系統(tǒng)。其絕大部分源代碼是用ANSIC編寫,可讀性強(qiáng)、移植方便、運(yùn)行穩(wěn)定可靠。μC/GUI具有完善的圖形函數(shù)庫和窗口管理功能、可移植性好、占用RAM和ROM的空間小等諸多優(yōu)點(diǎn),非常適合嵌入式系統(tǒng)的應(yīng)用。
應(yīng)用程序由三個(gè)任務(wù)構(gòu)成:
(1)TaskMeasureGas():汽車駛過后,立即檢測(cè)氣體濃度。將此任務(wù)作為一個(gè)最高優(yōu)先級(jí)的任務(wù)運(yùn)行,它的啟動(dòng)取決于TaskCANcom()提供的信號(hào)量。
(2)TaskCANcom():主要將測(cè)量結(jié)果送至上位機(jī)數(shù)據(jù)庫中。當(dāng)速度測(cè)量模塊經(jīng)CAN總線送出新數(shù)據(jù)時(shí),它接收并啟動(dòng)TaskMeasureGas()。優(yōu)先級(jí)較低。
(3)TaskuCGUI():顯示刷新模塊。它作為一個(gè)低優(yōu)先級(jí)的任務(wù)運(yùn)行。
此汽車尾氣遙測(cè)儀以ARM處理器為核心,注重抗干擾設(shè)計(jì),通過相對(duì)簡(jiǎn)單的系統(tǒng)結(jié)構(gòu)實(shí)現(xiàn)高精度實(shí)時(shí)快速測(cè)量CO、CO2汽車氣體的濃度。實(shí)踐表明,定標(biāo)后對(duì)這兩種氣體的測(cè)量精度達(dá)到10ppb級(jí),完全可以代替基于工控機(jī)的尾氣檢測(cè)系統(tǒng)。適當(dāng)改造結(jié)構(gòu)后,此檢測(cè)儀在環(huán)境污染氣體監(jiān)測(cè)、工業(yè)管道氣體泄漏、煤氣泄漏等方面有廣泛的應(yīng)用前景。













 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論