 電子發燒友App
電子發燒友App


在無線遙控領域,PT2262/2272是目前最常用的芯片之一,但由于芯片要求配對使用,在很大程度上影響了該芯片的使用,筆者從PT2262波形特征入手,結合應用實際,提出軟件解碼的方法和具體措施。
一、概述
PT2262/2272是一種CMOS工藝制造的低功耗低價位通用編解碼電路,是目前在無線通訊電路中作地址編碼識別最常用的芯片之一。
PT2262/2272最多可有12位(A0-A11)三態地址端管腳(懸空,接高電平,接低電平),任意組合可提供531441地址碼,PT2262最多可有6位(D0-D5)數據端管腳,設定的地址碼和數據碼從17腳串行輸出。
PT2262/2272必須用相同地址碼配對使用,當需要增加一個通訊機時,用戶不得不求助于技術人員或廠家來設置相同地址碼,客戶自己設置相對比較麻煩,尤其對不懂電子的人來說。隨著人們對操作的要求越來越高,PT2262/2272的這種配對使用嚴重制約著使用的方便性,人們不斷地要求使用一種無須請教專業人士,無須使用特殊工具,任何人都可以操作的方便的手段來彌補PT2262/2272的缺陷,這就是PT2262軟件解碼。
二、解碼原理

上面是PT2262的一段波形,可以看到一組一組的字碼,每組字碼之間有同步碼隔開,所以我們如果用單片機軟件解碼時,程序只要判斷出同步碼,然后對后面的字碼進行脈沖寬度識別即可。
2262每次發射時至少發射4組字碼,2272只有在連續兩次檢測到相同的地址碼加數據碼時才會把數據碼中的“1”驅動相應的數據輸出端為高電平和驅動VT端同步為高電平。因為無線發射的特點,第一組字碼非常容易受零電平干擾,往往會產生誤碼,所以程序可以丟棄處理。
下面我們來仔細看一下PT2262的波形特征:?
振蕩頻率 f=2*1000*16/Rosc(kΩ) kHz 其中Rosc為振蕩電阻 這里我們選用的是一種比較常用的頻率f≈10 kHz, Rosc=3.3MΩ(以下同)。下圖是振蕩頻率與碼位波形的對應關系:同步碼頭波形:
PT2262有三種編碼:0,1,和懸空(表示為f)。
1、 數據“0”發送的碼位如:
2、 數據“1”發送的碼位如:
3、 數據“f”發送的碼位如:
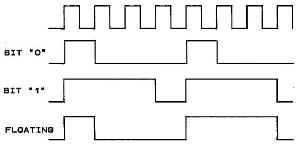
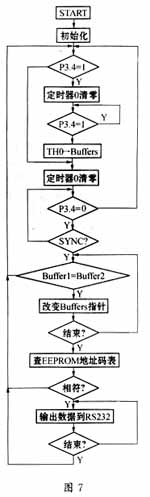
有了以上具體的波形,我們就可以進行軟件解碼了。T2262每次至少發送4次編碼,首先我們可以通過檢測11ms寬度的同步碼頭,有碼頭才開始進行編碼解碼,無碼頭則繼續等待。當收到碼頭時,還要檢測是否已經收到過碼頭,若無,則丟棄第一次編碼的信號,以防止誤碼。
從編碼圖中可以看出,每一位碼字都是從低電平開始到高電平,到低電平,再到高電平。為了檢測方便,在接收端我們把編碼信號進行了180°倒相,使碼位開始的上升沿轉化為下降沿,這樣當我們使用MCS51系列單片機解碼時可使用中斷方式及時截獲編碼。從編碼圖中還可以看出,每一位碼字都可以分成兩段,我們以每段中的電平寬度來描述碼位:
碼位 第一段 第二段 數值表示 反碼表示
??0???? 窄???? 窄??????00?????? 11
??1???? 寬???? 寬??????11?????? 00
??f???? 窄???? 寬??????01?????? 10
無效碼??寬???? 窄??????10?????? 01
軟件解碼方法1(反碼):
從第一個下降沿開始延時700us左右,檢測電平高低,記為A1,再檢測第二個下降沿,延時700us左右,檢測電平高低,記為A2,這樣一個碼位就可以譯出來了,連續檢測12個碼位。
軟件解碼方法2(反碼):
從第一個下降沿開始記時,并不斷檢測電平變化,一有電平變化,立即記錄電平寬度B1,再繼續記時直至出現第二個下降沿,記錄兩個下降沿的間隔B2,重復以上步驟,得到B3,B4,判斷B1,B2,B3,B4是否在各自允許的誤差范圍內,是則保存B1,B3,譯出一個碼位,否則認為誤碼,丟棄。連續正確檢測12個碼位。
兩種解碼方式各有優缺點如下:
??解碼方式????優點?????? 缺點
1 程序簡單,CPU開銷少 解碼精度差
2 程序復雜,CPU開銷大 解碼精度較高
為了獲得較高的解碼精度,我們推薦使用方法2,以避免大量的干擾信號的誤解碼。
三、參考解碼軟件
;軟件解碼程序(仿真PT2272) ;
;晶體頻率為11.0592Mhz ;
;本程序中的時間定位關系只適用于接3.3M振蕩電阻的PT2262解碼 ;
;使用其它阻值電阻時,應將定位時間按電阻比例縮放
;下面的程序中
;REM 為信號輸入端 ;
;RECEIVE 檢測到有效信號標志位 ;
;ENABLE_DETE 連續按鍵標志 ;
;3AH,3BH用作定時器 ; ;
;PT2262共12根地址線 ;
;31H,32H:接收的前8 位地址編碼 ;
;33H,30H:接收的后4 位地址編碼(若最后4位用作數據端,則只須讀第33H單元的內容即可) ;
;當用作數據端時,PT2262對應腳懸空被認為是低電平。
;地址數據說明 ;
;以31H.0 和32H.0 為例 ;
; 懸空 : 31H.0=0 32H.0=1 ;
;?? 1??: 31H.0=1 32H.0=1 ;
;?? 0??: 31H.0=0 32H.0=0 ;
; 出錯 : 31H.0=1 32H.0=0 ; ; ;
; 說明:為了能可靠檢測到有效信號,建議每次接收至少檢測3次,然后比較3次檢測值
;3次值相同才認為收到了正確信號。可在主程序中如下處理:第1次檢測時調用REMOTE
;第2、3次檢測時調用REMOTES,請注意必需連續調用,否則得不到正確的數據 ; ;
;注意:將T1設定為16位定時器,允許中斷,否則將導致接收數據錯誤
REMOTE: CLR RECEIVE ;;檢測50ms 內有沒有編碼接收 ;
MOV 3AH,#55
REMOTEA:MOV 3BH,#250
REMOTEB:JB REM,REMOTE0;有碼發送則跳轉
DJNZ 3BH,REMOTEB
DJNZ 3AH,REMOTEA
REMOTE_END_1:
CLR ENABLE_DETE
REMOTE_END:
CLR REMOTING ;清除探頭檢測標志
RET
REMOTE0:JB ENABLE_DETE,REMOTE_END_1 ;按鍵沒有放開則返回
REMOTES:MOV 34H,#12 ;接收12位編碼 ;解碼 ; ;先找出接收碼的開頭即10ms左右的高電平 ;
MOV TH1,#00H ;;設置高電平時間為8~12ms ; ;檢測和等待8ms 的 低電平,70ms門限 ;
CLR T_OVER
MOV TL1,#00H
SETB TR1
REMOTE1:MOV 3AH,#50
REMOTE2:MOV 3BH,#25
REMOTE3:JB REM,REMOTE1
JB T_OVER,REMOTE_END
DJNZ 3BH,REMOTE3
DJNZ 3AH,REMOTE2 ;; ;等待在4ms 內接收到的高電平 ;
CLR T_OVER
MOV TH1,#0F1H
MOV TL1,#0F0H
SETB TR1
REMOTE_4:
JB T_OVER,REMOTE_5
JNB REM,REMOTE_4
CLR TR1
AJMP REMOTE6 ;;超出12ms 接收錯誤返回 ;
REMOTE_5:
AJMP REMOTE_END
REMOTE6:MOV 3AH,#00 ;等待550us 后采集接收信號 ;
DJNZ 3AH,$ ;;采集接收信號并記錄 ;
MOV C,REM
MOV A,33H
RLC A
MOV 33H,A
MOV A,31H
RLC A
MOV 31H,A ;;等待第二個上升沿,限時1.5ms ;
CLR T_OVER
MOV TH1,#0FAH
MOV TL1,#099H
SETB TR1
RM1: JB T_OVER,REMOTE_END
JB REM,RM1
CLR TR1 ;;
CLR T_OVER
MOV TH1,#0FAH
MOV TL1,#099H
SETB TR1
RM2: JB T_OVER,REMOTE_END
JNB REM,RM2
CLR TR1 ;;等待550us 后采集接收信號 ;
MOV 3AH,#00
DJNZ 3AH,$
MOV C,REM
MOV A,30H
RLC A
MOV 30H,A
MOV A,32H
RLC A
MOV 32H,A ;;等待第二個碼值的上升沿 ;
CLR T_OVER
MOV TH1,#0FAH
MOV TL1,#099H
SETB TR1
RM3: JB T_OVER,RM5
JB REM,RM3
CLR TR1 ;;
CLR T_OVER
MOV TH1,#0FAH
MOV TL1,#099H
SETB TR1
RM4: JB T_OVER,RM5
JNB REM,RM4
CLR TR1
DJNZ 34H,REMOTE6 ;;把接收的編碼左移4 位將8 位密碼放在同一字節上
MOV 34H,#4
AJMP REMOTE7
RM5: AJMP REMOTE_END
REMOTE7:CLR C
MOV A,33H
RLC A
MOV 33H,A
MOV A,31H
RLC A
MOV 31H,A
CLR C
MOV A,30H
RLC A
MOV 30H,A
MOV A,32H
RLC A
MOV 32H,A
DJNZ 34H,REMOTE7 ;;把4 位數據編碼由高4 位移到低4 位上 ;
MOV A,33H
SWAP A
MOV 33H,A
MOV A,30H
SWAP A
MOV 30H,A
SETB ENABLE_DETE
SETB RECEIVE ;;
AJMP REMOTE_END_1
END
四、硬件抗干擾
在無線通訊中使用單片機會對通訊系統造成嚴重的干擾,相信許多技術人員一定有過同樣的苦惱。如果硬件設計不當,會造成原先硬件解碼時通訊距離為200米,而用軟件解碼后可能只有十幾米,因此解決硬件抗干擾問題在很大程度上可減少軟件解碼的誤碼率。
1、收發模塊:早期常用的頻率為47MHz,在這種頻率下,很難有好的解決方法;建議采用目前國家允許無線遙控使用的頻率315 MHz。
2、單片機振蕩頻率:大量的MCS51教材中推薦大家使用的是12MHz及11.0592MHz的晶體,這些晶體在一般場合使用沒有問題,但在此卻不可以,它們在300MHz左右仍然能夠產生較大的干擾,為解決單片機運行速度與電磁干擾的矛盾,建議采用頻率為4MHz或3.58MHz的晶體。
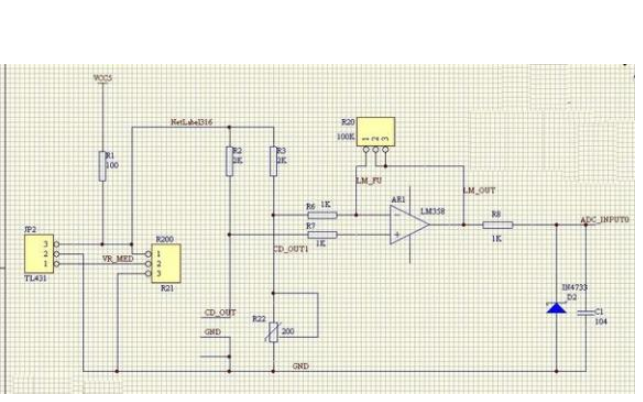
3、隔離:為了有效抑制單片機對接收模塊的電磁干擾,建議采用①電源隔離;②端口隔離;端口隔離可采用三極管或比較器。實踐表明采用隔離的效果非常明顯。
五、結束語
PT2262的軟件解碼在實際應用中有較好的用武之地。采用軟件解碼的系統,廠家再也無須對收發設備進行配套,以利于生產于保管;對客戶來說,使用軟件解碼無須求助,廠家只須再軟件中加入自動學習功能,用戶可自行使用該功能,只須輕按學習鍵即可學習新的通訊設備,如遙控器等。目前,該軟件解碼已經在某









 工商網監
工商網監
評論