 電子發燒友App
電子發燒友App


????? 使用超聲波可以很方便的對一定空間內的運動物體進行有效的探測,具有安裝方便,探測效果好的特點。本文介紹一種利用超聲波多普勒效應設計的來人探測裝置。該設計使用了PICl6F628A單片機,對以往用到的超聲波探測硬件電路進行改進,利用軟件編程對來人情況進行有效地探測,繼而輸出控制信號控制照明裝置的開關。
1 工作原理及特點
當聲源與聲波接收器之間存在有相對運動時,聲波接收器所接收到的信號頻率將與傳播的聲波頻率有所不同,頻率差量與聲源和接收器之間的相對運動速度有關,這就是多普勒效應造成的。本設計采用超聲波發送器和接收器均朝同方向固定不動,當有障礙物體朝向或者遠離二者運動時,可以看作是由障礙物表面對聲波的反射效應所形成的鏡像聲源與接收器之間存在相對運動,同樣可以利用多普勒效應,根據接收器收到的信號來判斷是否有人在探測范圍內移動。
該裝置同時具有超聲波發射和接收換能器,使用時安裝方便。正面最大探測距離在1~5.5 m可調,可以對該空間內運動物體進行有效地探測。當探測到運動物體之后輸出+12 V信號控制照明裝置的開關。其輸出+12 V的持續時間可以在15~1 800 s可調。
2 硬件系統
本裝置采用發射和接收分別獨立的超聲波換能器,硬件系統基本可以分為微處理器部分、發射部分和接收部分。
微處理器使用的是Microchip公司生產的PICl6F628A單片機,其引腳如圖1所示。該單片機為精簡指令集型處理器(RISC),共有35條匯編指令,使用起來簡捷有效。PICl6F628A共有18個引腳,標準工作電壓為5 V,外接晶振最大可以達到20 MHz。其內部資源非常豐富,含有2 KB的Flash程序存儲器、224B的數據存儲器、2個模擬比較器、1個PWM控制器、1個16位的定時器/計數器,1個8位定時器/計數器,1個8位定時器,以及上電啟動電路、掉電復位電路和看門狗電路等。PICl6F628A還能夠響應定時器、比較器、RB端口等多種硬件中斷合理地使用這些資源可以有效簡化外圍電路,降低產品的成本(本設計未用的片內資源此處沒有列出)。

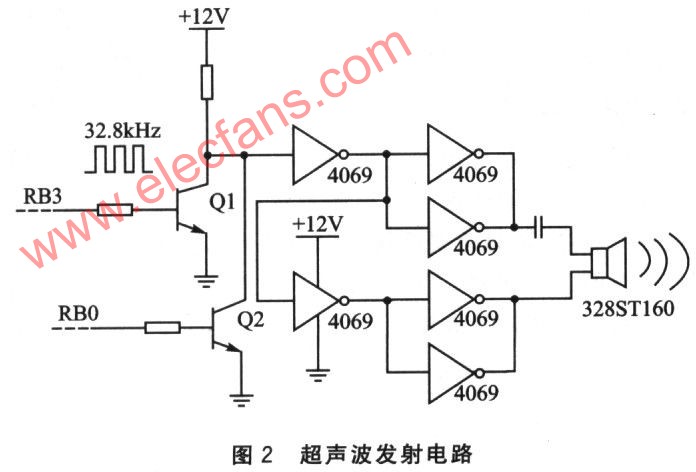
發射部分電路圖如圖2所示。超聲波發射換能器采用328STl60,其中心頻率為32.81.O kHz。使用PIcl6F628A單片機的PWM控制器,由RB3端口輸出約32.8 kHz的方波信號,并通過三極管Q1和4069進行電壓和電流的放大,從而驅動發射換能器發射出超聲波信號。其中三極管Q2是為系統自檢而設計的。在正常的探測過程中,RBO端口一直輸出低電平,使三極管Q2保持截止狀態,不會影響超聲波發送換能器的正常發射。
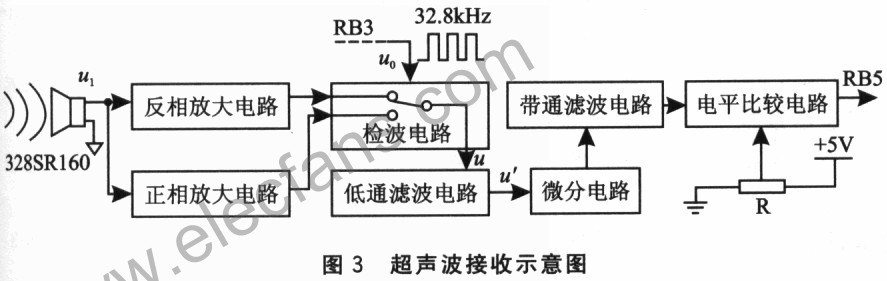
接收部分電路圖如圖3所示。超聲波接收換能器采用328SRl60,其中心頻率亦為32.8士1.0 kHz。由于接收換能器直接接收到的信號比較微弱,首先需要通過運算放大器進行放大。這里使用的運算放大器型號為TLO62,為了配合后面進行檢波,分別組成正相和反相放大電路。檢波電路實際上使用了雙向模擬開關芯片4066,利用超聲波發送的驅動信號作為檢波的參考信號,即由RB3控制4066的模擬開關的切換。當RB3電平為高時,連通正相放大電路;當RB3電平為低時,連通反相放大電路。這相當于把放大之后的信號不停地乘以土1,其切換頻率和超聲波的發送頻率一樣。設該頻率為,fo,則模擬開關所產生的等效信號是頻率為fo,幅值為土1的方波,設之為uo。則由傅里葉級數可得uo。的表達式為:

,
設接收信號為u1=Usin(2πf1t+π),設正相和反相放大電路的放大倍數為A,則通過檢波電路之后的信號u的表達式為:
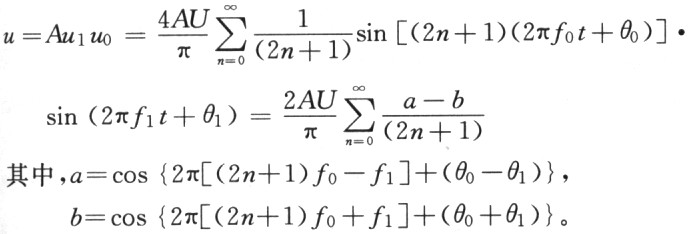
其中,fo。為超聲波發送信號的頻率,θ0為其初相角,f1為接收到的超聲波信號的頻率,θ1為其初相角,U為其幅值。
由于多普勒效應,如果沒有運動物體反射超聲波,則,fo=f1;一旦有運動物體反射超聲波,則fo一f1≠O。雖然fo和f1都比較大,但是由人體運動所產生的頻差,即,fo一fl的絕對值卻不會太大。由上面的公式推導結果可以看出,只要經過一個低通RC濾波器把高頻信號濾掉,便可以得到由人體運動所產生的特征信號

接著通過一個微分器對u’進一步處理,得到變化更加明顯的波形,從而可以有效提高探測靈敏度。再通過帶通濾波器除去無用信號或者干擾信號之后,經過比較器輸出波形送至單片機RB5端口,利用單片機的RB口中斷便可以實時處理接收到的脈沖信號。如圖3,調節R可以改變電平比較電路的比較電平,從而使該裝置的正面最大探測距離在1~5.5 m可調。
如圖4所示,利用PICl6F628A單片機RA4端口為集電極開路的結構特點,可直接在RA4端口加個上拉電阻,即可方便地實現對照明裝置的控制。PIC系列單片機端口的驅動能力非常強,能夠直接驅動LED。當探測到運動物體時,單片機通過RA4端口輸出+12 V電平信號驅動照明設備,同時通過RB2端口控制LED閃亮一次。
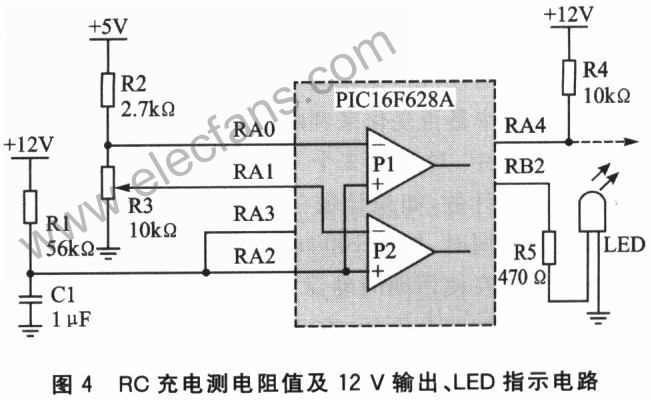
另外,調節R3可以使+12V電平信號的持續時間在15~1800 s變化。該功能主要利用單片機內部的兩個比較器,結合外圍RC充電電路來實現對:R3位置的檢測。具體過程如下:通過對單片機的控制字進行設置,使比較器P1和P2的正相輸入端在單片機內部連接在一起并與RA2端口相連,RA0、RAl、RA2都為輸入端口,如圖4所示。
在正常狀態下RA3為輸出端口,且輸出為低電平,此時電容Cl和比較器P1、P2處于穩定狀態。當需要測試R3滑動頭的位置時,RA3端口則從輸出變為輸入,并且單片機內部的定時器開始計時。這樣一來+12 V便通過電阻R1開始對電容C1進行充電,當端口RA2的電平超過端口RAl時,比較器P2的輸出會發生變化,引起單片機的比較器中斷。在中斷服務程序里,讀取定時器的數值便可以計算出電阻R3滑動頭的位置。然后再把端口.RA3恢復成輸出低電平,使電容C1放電,整個電路回到初始的狀態,為下一次檢測做好準備。比較器P1的作用是防止比較器P2出現意外。當端口RA2的電平超過端口RAl時還沒產生中斷的話,就由比較器P1產生中斷,并使電容C1停止充電,避免端口RA2和RA3的電平過高,使單片機損壞。對電阻R3的測量是為了設定照明設備的點亮時間,精度要求并不高,所以使用該電路進行測量不但簡單方便成本低,而且實際當中使用效果良好。
3 軟件編程
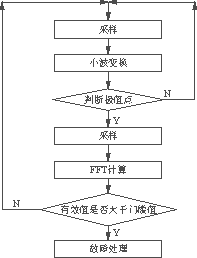
在硬件處理的基礎上,到達單片機的波形已經比較理想了,但是并不能單純以收到脈沖信號作為探測的標準,仍然需要利用軟件編程進一步增加抗干擾性能。由于該裝置主要目的是探測人體的運動情況,而人體稍微地一個小動作至少都能使單片機接收到幾百個ms時間的脈沖信號。為了提高可靠性,本設計對于持續時間不到100 ms的信號忽略不計。另外,如果多臺裝置同時工作,由于各種硬件誤差可能導致發送出來的超聲波頻率不能完全相同,當差別比較大時會持續收到一定頻率的脈沖信號,如果不作處理,這也會影響正常的探測。考慮到在沒有人通過時,如果有干擾,且干擾源穩定的話,單片機收到脈沖信號的頻率是基本不變的,所以,比較理想的探測機制為:根據返回頻差信號的頻率是否變化來判斷是否有人體運動存在。
在本設計中,對連續2個100 ms時間段內對接收到脈沖信號進行計數,如果計數值有增加,則判斷為探測成功。在計數的同時,如果1OOms內的計數值小于5,則舍棄不計。為了在使用期間確保可靠,本裝置間隔一定時間就進行自檢。如圖2所示,在正常的探測過程中,RBO端口一直輸出低電平,只有在需要自檢時,RB0端口才輸出一定頻率的方波,作為自檢信號。此時,超聲波信號在發射之前就已經被自檢信號調制了,如果整個裝置工作正常,即使在沒有運動物體反射超聲波的情況下,單片機也能接收到脈沖信號。依此便可進行自檢,判斷自身工作是否正常。假如自檢失敗,則使LED不停閃爍以指示自身出現故障,并且一直輸出+12 V信號控制照明裝置常亮,避免影響行人正常通過。
4 總 結
該裝置外形如圖5所示,底部有懸掛卡口,可以方便地安裝在通道的墻壁上。頂部的靈敏度旋鈕可以調節探測的靈敏度,延時時間旋鈕可以調節來人之后照明裝置點亮的時間。頂部的LED能夠指示正常狀態下的探測情況以及自檢失敗時的故障。

實踐證明,該裝置不僅安裝方便,而且使用效果良好,能夠滿足多種場合下的來人探測要求。另外,該裝置探測靈敏度高,稍作調整也可以作為安防系統的報警裝置使用。











 工商網監
工商網監
評論