 電子發燒友App
電子發燒友App


?????? 本文主要進行了一個超聲儀的控制系統的研究詳細介紹了控制器的軟硬件設計
?????? 采用了TI公司的MSP430單片機作為控制器的核心器件滿足目前儀器設計中低功耗、高度集成化和小型化的發展趨勢PC機的監控軟件用VC++6.0開發單片機的程序用C設計通過RS-232C實現PC機和單片機的串口通信進而實現了控制器對超聲儀的控制功能
????? 1 引言
?????? 隨著計算機技術、微控制器和超聲技術的不斷發展超聲儀器的發展也十分迅速有著廣泛的應用和發展市場超聲學應用技術主要有兩個方面即功率超聲和檢測超聲由于功率超聲處理技術具有許多特點與其它處理技術比較能極大地提高處理速度和效率提高處理質量和完成一般技術不能完成的處理工作本文的主要任務是研究應用于功率超聲儀的控制系統并對其的工作過程和工作狀態進行測控其主要功能包括:①調節驅動脈沖的占空比;②控制超聲儀運行時序;③ 檢測信號源頻率
????? 2 超聲儀控制系統框圖
?????? 超聲儀控制系統用于控制超聲儀的工作并檢測其信號源的頻率全要由PC機和超聲儀控制器組成控制器為一個智能測控儀器由MSP430單片機及其外圍電路組成PC機和MSP430單片機通過RS232-C完成串口通信控制系統框圖如圖l系統采用異步串行通信方式以RS-232C全雙工傳輸方式實現PC機和單片機之間的數據傳送從而達到PC機對單片機進行控制的目的實現超聲儀控制系統控制功能

圖1 超聲儀控制系統框圖
?????? 3 超聲儀控制系統硬件詳細設計
?????? 控制系統硬件部分由PC機和超聲儀控制器組成PC機選擇常用的微機即可滿足要求超聲儀控制器的設計是這個系統的核心整個控制器的硬件電路由MSP430及其接口電路組成
???? ? 1、電平轉換電路由于MSP430單片機的串門電平是TTL電平TTL電平特性與RS232的電氣特性不匹配為了使MSP430單片機的串口能與 RS-232C接口通信必須將串行口的電平進行轉換本系統中異步通信接口電路采用新型的電平轉換器件MAX3233EMAX3233E芯片內部有一個電源電壓變換器可以把輸入的+3.3V電源電壓變換成為RS-232C輸出電平所需的±12V電壓采用此芯片接口的串行通信系統只需單一+ 3.3V電源
?????? 2、電源與晶振電路主要由7805和LM317組成集成三端穩壓器7805的輸出端和共地端之間始終保持5V的穩定電壓即7805的輸出電流在內部電阻上的壓降始終是5V所以只要內部電阻被確定7805的輸出電壓就確定并保持非常穩定LM317L是可調整的三端正電壓穩壓器在輸出電壓范圍為1.2伏到37伏時能夠提供超過100毫安的電流對于一個高可靠性的系統設計晶體的選擇非常重要尤其是設計帶有睡眠喚醒(往往用低電壓以求低功耗)的系統本電路選用8M和32768兩個外部晶振
?????? 3、復位與PWM輸出電路系統復位電路的設計一定要使系統能夠充分復位在各種復雜情況下穩定可靠地工作復位性能不好會影響系統的正常運行本系統采用常用的上電復位電路能保證有充分的低電平時間由MSP430單片機的P4.3管腳輸出占空比和頻率可調的PWM波形輸出的信號經施密特觸發器SN7414脈沖整形后再經光耦TPL521隔離然后由J6的1腳輸出在MSP430中就是采用CCRO來控制周期T而用與定時器對應的CCR3 寄存器來控制可變占空比
?????? 4、開關量輸出電路PC機發出命令單片機由串口接收到PC機的指令然后執行相應的操作完成由P1.4管腳輸出高低電平時間可以調整的開關量信號輸出的信號經SN7414脈沖整形后再經光耦TPL521隔離由J6的4腳輸出為了保證MSP430單片機系統運行的穩定性及更好地避免外界信號的干擾用TPL521對輸入輸出信號進行電氣隔離在光耦的4腳接上拉電阻起到加大驅動能力和抗干擾的作用電路圖如2所示

?圖2 整形電路與光耦隔離電路
???? (a) 7414整形電路?????????????????????????????
???? (b) 光耦隔離電路
?????? 5、頻率檢測與JTAG接口電路該檢測電路用于檢測外來頻率信號信號經由J5的4腳輸入3腳接地該信號由7414整形后送入149的 P1.2管腳當頻率檢測命令到來時用看門狗打開P1.2管腳的中斷功能看門狗作定時器P1.2管腳每發生一次管腳中斷就計數一次當一秒的時間到時看門狗就關掉P1.2管腳的中斷功能這樣得到的數值就是檢測到的頻率值將可編程接口與MSP430對應的引腳相接接口另一端接JTAG仿真器 就可以實現在線編程向電路板上MSP430重新下載程序
?????? 6、液晶顯示控制電路設計單片機通過向液晶顯示控制器寫入指令及其參數來實現對顯示效果的控制液晶顯示控制器控制部的主要工作是將單片機寫到顯示存儲器的數據以某種形式傳給液晶顯示驅動系統僅有驅動系統是不能實現液晶顯示器件顯示的還需要有控制電路提供驅動系統所必須的掃描時序信號和顯示數據SED1335液晶控制板是用于單片機與液晶模塊之間控制的控制板它接收來自單片機的指令和數據并產生相應的時序及數據控制液晶模塊的顯示可用于所有適合SED1335的液晶模塊SED1335硬件分為:CPU接口部、內部控制部和驅動LCD的驅動部如圖3所示

圖3 SED1335硬件原理圖
?????? 4 超聲儀控制軟件設計
?????? 超聲儀控制系統的軟件設計分為兩部分包括PC機監控軟件設計和單片機程序設計PC機監控軟件采用功能強大的VC進行開發主要考慮到控制功能的復雜性和靈活性單片機程序設計在一個新型的開發平臺上進行的
?????? 4.1 PC機監控軟件設計
?????? PC機監控軟件是控制系統的管理軟件它根據我們提出的控制系統的技術要求來負責發出相應的命令控制控制器進行相應的操作進而控制超聲儀的工作作為智能測控系統其強大的控制功能及控制的靈活性都離不開軟件的支持在本程序異步通信中收、發雙方必須事先規定兩件事:一是字符格式即規定字符各部分所占的位數是否采用奇偶校驗以及校驗的方式(偶校驗還是奇校驗)等的通信協議;二是采用的波特率以及時鐘頻率和波特率的比例關系
?????? PC機監控軟件包括以下幾個程序:開關量輸出開始開關量輸出暫停開關量輸出時間調節PWM信號輸出PWM信號停止PWM頻率調節PWM占空比調節實時頻率檢測間斷頻率檢測選定程序運行時刻退出程序運行下面是它的軟件框圖4
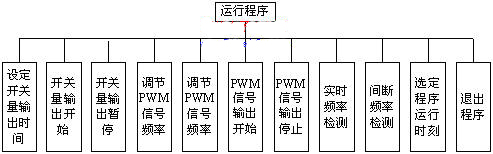
圖4 PC機監控軟件框圖
?????? 4.2 單片機程序設計
?????? 單片機的程序由主程序和若干子程序組成程序用C語言編寫實現了串口通信、開關量輸出、PWM信號輸出、頻率檢測及液晶顯示的功能由于篇幅限制此處僅介紹主程序與PWM輸出程序
?????? 1、單片機的主要任務是接收PC機發來的數據并作相應的回應當單片機一旦接收到一個數據立刻根據所得數據進行判斷以決定需要進行什么操作當操作完成之后向PC機返回一些數據以報告所操作器件當前的運作狀態然后再回到數據的檢測循環中去單片機采用中斷方式接收和發送數據主程序中先進行初始化當F1agWord的0位非0時即檢測到有數據的接收然后進入CommandProcess流程完成各個子程序的功能;當檢測到 FdetectDone(頻率檢測完成)信號時調用SendOut函數將檢測到的頻率值送給PC機和LCD框圖如圖5

圖5 主程序框圖
??????? 2、單片機的程序中PWM-Propo_ Adj、PWM-Frequ_ Adj函數分別完成占空比和頻率的調節占空比從0到100可調頻率從0.1到10Hz可調程序中采取增計數模式輸出模式3 (PWM置位/復位)這種輸出模式輸出在TBR的值等于TBCCR3時為高電平直到TBR的值增加到TBCCR0我們定義高電平的占空比為 ProportionProportion/100=(TBCCR0-TBCCR3)/TBCCR0TBCCR3= TBCCR0* (100-Proportion)/100
???????頻率調節采取分段調節的方法在1-10Hz步長為1采用時鐘頻率為32768 Hz;在0.5-0.9步長為0.1采用時鐘頻率32768 Hz;在0.1-0.4步長為0.1將時鐘頻率32768Hz經過8分頻方能滿足要求以上兩點是程序中值得注意的技巧具體分析如下:選用時鐘頻率為 32768 Hz時如果要輸出的頻率值為1Hz則TBCCRO中的值為32768那么如果要輸出的頻率值
???????為2Hz則TBCCRO中的值為32768/2在本程序中單片機根據PC機滑塊的位置變化來控制輸出PWM信號的頻率值
???????本文作者創新點
???????本文進行了基于MSP430的超聲儀控制系統研究主要利用MSP430系列單片機開發工具進行了單片機的程序設計完成了一個智能測控系統的軟硬件設計通過整個系統的研究體現了MSP430FLASH系列單片機的特點適合用在低功耗場合和小型化儀器中








 工商網監
工商網監
評論