 電子發(fā)燒友App
電子發(fā)燒友App


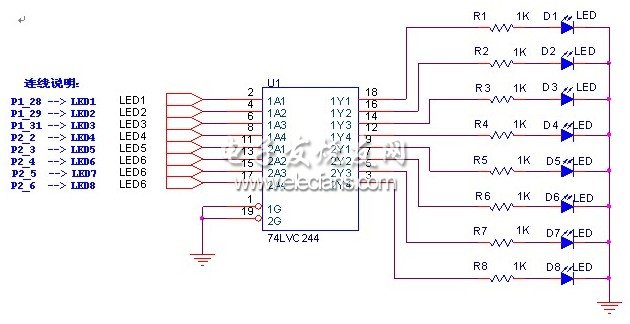
因?yàn)轫?xiàng)目所需,所以不得不開始研究M3,我用的是NXP公司的LPC1768這個(gè)芯片,它是具有三級(jí)流水線的哈佛結(jié)構(gòu),帶獨(dú)立的本地指令和數(shù)據(jù)總線以及用于外設(shè)的稍微低性能的第三條總線,還包含一個(gè)支持隨機(jī)跳轉(zhuǎn)的內(nèi)部預(yù)取指單元。好了,今天只是初步測試一下它的GPIO功能,所謂的GPIO也就是通用輸入/輸出口(General Purpose Input Output),萬丈高樓平地起,慢慢來吧。實(shí)驗(yàn)的原理圖很簡單,就是幾個(gè)LED燈,關(guān)于燈的電流及電壓參數(shù),這里不作詳細(xì)介紹,有興趣的可以到網(wǎng)上或供應(yīng)商那里要一份數(shù)據(jù)手冊看一下,做技術(shù)的不能懶,有些東西該看的還是要看的。
?
圖1 硬件原理圖
硬件原理圖很簡單了,74LVC244是用來驅(qū)動(dòng)LED的,74LVC244內(nèi)部就是8個(gè)三態(tài)門,關(guān)于它的詳細(xì)電氣參數(shù),請參閱它的數(shù)據(jù)手冊。關(guān)于程序也不是太難,有幾個(gè)地方要說一下。即然是GPIO實(shí)驗(yàn),當(dāng)然要關(guān)注GPIO的配置了,由于大部分引腳都具有一個(gè)以上功能,所以首先要配置引腳功能寄存器PINSEL,只有當(dāng)引腳配置為GPIO功能時(shí),GPIO的方向位才有效,對于其它功能來說,方向是自動(dòng)的。關(guān)于引腳功能寄存器PINSEL功能如下表所示:
PINSEL0~PINSEL9的值功能復(fù)位后的值
00默認(rèn)功能,通常為GPIO口00
01第一個(gè)可選功能
10第二個(gè)可選功能
11第三個(gè)可選功能
PINSEL寄存器每兩位控制一個(gè)引腳,由于各個(gè)引腳的功能不一樣,所以PINSEL0~PINSEL9的配置也相應(yīng)的有所不同,想詳細(xì)了解這10個(gè)寄存器的功能可以參看《user.manual.lpc17xx》,這個(gè)手冊可以到NXP的網(wǎng)站上去下載。由于這次實(shí)驗(yàn)只是用到GPIO功能,所以暫時(shí)不用管這個(gè)寄存器,用它的默認(rèn)值就可以了。
另一個(gè)寄存器是引腳模式選擇寄存器PINMODE,它控制所有端口的工作模式,包括是否配置上拉/下拉電阻和特定的開漏操作模式等。引腳模式選擇寄存器PINMODE的功能如下表所示:
PINMODE0~PINMODE9的值功能復(fù)位后的值
00引腳使能片內(nèi)上拉電阻00
01中斷模式
10引腳沒有使能片內(nèi)上拉/下拉電阻
11引腳使能下拉電阻
當(dāng)引腳處于邏輯高電平時(shí),中繼模式使能上拉電阻,當(dāng)引腳處于邏輯低電平時(shí),使能下拉電阻,當(dāng)引腳配置為輸入且不是通過外部驅(qū)動(dòng)時(shí),引腳將保持上一個(gè)已知狀態(tài)。PINMODE_0D寄存器控制寄存器的開漏模式,引腳配置為輸出且值為0時(shí),開漏模式會(huì)正常地將引腳電平拉低。但是如果輸出引腳為1,則引腳輸出驅(qū)動(dòng)關(guān)閉,等同于改變了引腳的方向,實(shí)際上是模擬了一個(gè)開漏輸出。
PINMODE_0D0~PINMODE_0D4的值功能復(fù)位后的值
00引腳處于正常模式(非開漏模式)00
01引腳處于開漏模式
除了以上兩個(gè)寄存器要配置,與GPIO端口相關(guān)的寄存器還有快速端口值寄存器FIOPIN可以用來讀/寫端口的值,端口輸出置位寄存器FIOSET,當(dāng)這個(gè)寄存器的相應(yīng)位置1時(shí),相應(yīng)端口引腳輸出1,當(dāng)然也可以從這個(gè)寄存器讀取當(dāng)前引腳輸出的值,與它對應(yīng)的寄存器是FIOCLR,當(dāng)寄存器FIOCLR相應(yīng)位置1時(shí),相應(yīng)引腳輸出0,但這個(gè)寄存器是只寫寄存器,不能讀取數(shù)據(jù)。好了,關(guān)于這些寄存器先總結(jié)到這,詳細(xì)的配置還要看LPC1768的用戶手冊《user.manual.lpc17xx》,當(dāng)然也可以經(jīng)常去NXP網(wǎng)站逛逛看看其它的handbook或whitepaper 好了,下面給出實(shí)驗(yàn)程序,由于程序太多,只給出部分,剩下的源文件可以到工程文件夾中去找:
/*********************************************************************************
文件名稱:mian.c
功 能: 主要調(diào)度函數(shù)及應(yīng)用函數(shù)
編譯環(huán)境: MDKV4.12
時(shí) 鐘: 外部12Mhz
日 期: 11/08/16
作 者: 懶貓愛飛
備 注:NULL
---------------------------------------------------------------------------------
修改內(nèi)容:NULL
修改日期:XXXX年xx月xx日 xx時(shí)xx分
修改人員:xxx xxx xxx
**********************************************************************************/
#include"main.h"
volatile unsigned lONg SysTickCnt; /* 用于系統(tǒng)時(shí)鐘計(jì)數(shù)*/
/********************************************************************************
* 函數(shù)名稱:void SysTick_Handler (void)
* 函數(shù)功能: 系統(tǒng)節(jié)拍定時(shí)器中斷函數(shù),每1ms計(jì)數(shù)一次
* 入口參數(shù): 無
* 出口參數(shù): 無
* 備 注:無
*******************************************************************************/
void SysTick_Handler (void)
{
SysTickCnt++;
}
/********************************************************************************
* 函數(shù)名稱:void Delay (unsigned long tick)
* 函數(shù)功能: 毫秒級(jí)延時(shí)函數(shù)
* 入口參數(shù): unsigned long tick -- 延時(shí)時(shí)長
* 出口參數(shù): 無
* 備 注:無
*******************************************************************************/
void DelayMs (unsigned long tick)
{
unsigned long systickcnt;
systickcnt = SysTickCnt;
while ((SysTickCnt - systickcnt) < tick);
}
/********************************************************************************
* 函數(shù)名稱:void PortInit(void)
* 函數(shù)功能: 端口初始化
* 入口參數(shù): 無
* 出口參數(shù): 無
* 備 注:無
*******************************************************************************/
void PortInit(void)
{
GPIO1->FIODIR = 0xB0000000; /* LEDs on PORT1 defined as Output */
GPIO2->FIODIR = 0x0000007C; /* LEDs on PORT2 defined as Output */
Led1Off(); /* 初始化時(shí)熄滅所有的燈*/
Led2Off();
Led3Off();
Led4Off();
Led5Off();
Led6Off();
Led7Off();
Led8Off();
}
/********************************************************************************
* 函數(shù)名稱:int main(void)
* 函數(shù)功能: 主函數(shù)
* 入口參數(shù): 無
* 出口參數(shù): 無
* 備 注:無
*******************************************************************************/
int main(void)
{
SystemInit(); /* 系統(tǒng)初始化,函數(shù)在system_LPC17xx.c文件夾中定義*/
SysTick_Config(SystemFrequency/1000 - 1); /* 配置時(shí)鐘中斷,每1ms中斷一次*/
/* 在core_cm3.h中定義*/
PortInit(); /* 端口初始化*/
while(1)
{
Led1On(); //LED1開
Led4On(); //LED4 開
DelayMs(200);
Led1Off(); //LED1關(guān)
Led4Off(); //LED4關(guān)
DelayMs(200);
}
}
因?yàn)槌绦蚴亲罨A(chǔ)的實(shí)驗(yàn),所以不是太難,程序中延時(shí)函數(shù)用的是系統(tǒng)節(jié)拍定時(shí)器,每1m中斷一次,系統(tǒng)節(jié)拍定時(shí)器的中斷配置函數(shù)是SysTick_Config(uint32_t ticks)它在core_cm3.h中有定義,有興趣的話可以看看。GPIO是一個(gè)結(jié)構(gòu)體指針,原型在LPC17XX.H這個(gè)頭文件中,其定義的原型如下所示:
typedef struct
{
__IO uint32_t FIODIR;
uint32_t RESERVED0[3];
__IO uint32_t FIOMASK;
__IO uint32_t FIOPIN;
__IO uint32_t FIOSET;
__O uint32_t FIOCLR;
} GPIO_TypeDef;
還有幾個(gè)宏定義,如下所示:
1)、#define GPIO1 (( GPIO_TypeDef *) GPIO1_BASE)
上面這個(gè)宏是把GPIO1指向芯片GPIO1的基址上,
2)、#define GPIO1_BASE (GPIO_BASE + 0x00020)
3)、#define GPIO_BASE (0x2009C000UL)
這三個(gè)宏就把GPIO的基址定義了出來,關(guān)于LPV1768內(nèi)部地址的分配情況,可以參看它的數(shù)據(jù)手冊,也可參考一下《ARM Cortex-M3 權(quán)威指南》。
??????? 有輸出總會(huì)有輸入,今天測試一下按鍵的功能,第一節(jié)已經(jīng)說過了與GPIO端口相關(guān)的寄存器,這里不在重復(fù),想要從端口讀取數(shù)據(jù),首先把FIODIR這個(gè)寄存器設(shè)置為輸入,再從FIOPIN寄存器讀取數(shù)據(jù)就可以了,這個(gè)寄存器具有讀寫功能。下面說一下這個(gè)實(shí)驗(yàn)的電路圖,如下所示:

?
圖1 JoySTick按鍵連線圖
關(guān)于按鍵電路還有一個(gè),不過是接在外部中斷0 上的,其電路圖如下圖所示:

?
這次實(shí)驗(yàn)沒有涉及到外部中斷,都是做普通的IO輸入使用的,所以在這里外部中斷就做學(xué)習(xí)總結(jié)了。下面給出這次實(shí)驗(yàn)的主程序:
/*********************************************************************************
文件名稱:mian.c
功 能: 主要調(diào)度函數(shù)及應(yīng)用函數(shù)
編譯環(huán)境: MDKV4.12
時(shí) 鐘: 外部12Mhz
日 期: 11/08/16
作 者: 懶貓愛飛
備 注:NULL
---------------------------------------------------------------------------------
修改內(nèi)容:NULL
修改日期:XXXX年xx月xx日 xx時(shí)xx分
修改人員:xxx xxx xxx
**********************************************************************************/
#include"main.h"
volatile unsigned lONg SysTickCnt; /* 用于系統(tǒng)時(shí)鐘計(jì)數(shù)*/
/********************************************************************************
* 函數(shù)名稱:void SysTick_Handler (void)
* 函數(shù)功能: 系統(tǒng)節(jié)拍定時(shí)器中斷函數(shù),每1ms計(jì)數(shù)一次
* 入口參數(shù): 無
* 出口參數(shù): 無
* 備 注:無
*******************************************************************************/
void SysTick_Handler (void)
{
SysTickCnt++;
}
/********************************************************************************
* 函數(shù)名稱:void Delay (unsigned long tick)
* 函數(shù)功能: 毫秒級(jí)延時(shí)函數(shù)
* 入口參數(shù): unsigned long tick -- 延時(shí)時(shí)長
* 出口參數(shù): 無
* 備 注:無
*******************************************************************************/
void DelayMs (unsigned long tick)
{
unsigned long systickcnt;
systickcnt = SysTickCnt;
while ((SysTickCnt - systickcnt) < tick);
}
/********************************************************************************
* 函數(shù)名稱:void PortInit(void)
* 函數(shù)功能: 端口初始化
* 入口參數(shù): 無
* 出口參數(shù): 無
* 備 注:無
*******************************************************************************/
void PortInit(void)
{
GPIO1->FIODIR = 0xB0000000; /* LEDs on PORT1 defined as Output */
GPIO2->FIODIR = 0x0000007C; /* LEDs on PORT2 defined as Output */
LedAllOff(); /* 初始化時(shí)熄滅所有的燈*/
}
/********************************************************************************
* 函數(shù)名稱:int main(void)
* 函數(shù)功能: 主函數(shù)
* 入口參數(shù): 無
* 出口參數(shù): 無
* 備 注:無
*******************************************************************************/
int main(void)
{
unsigned char LedFlag = 1; // 記錄LED狀態(tài)
SystemInit(); /* 系統(tǒng)初始化,函數(shù)在system_LPC17xx.c文件夾中定義*/
SysTick_Config(SystemFrequency/1000 - 1); /* 配置時(shí)鐘中斷,每1ms中斷一次*/
/* 在core_cm3.h中定義*/
PortInit(); /* 端口初始化*/
while(1)
{
if(!LedFlag)
{
Led1On(); // 點(diǎn)亮LED
}
else
{
Led1Off(); // 熄滅LED
}
if(!KEY_VAL)
{
DelayMs(10);
while(!KEY_VAL);
LedFlag ^=1; // Led狀態(tài)改變一次
}
if(!KEY_EN) // 此處是為了測試搖桿按鍵的功能是否正常
{
DelayMs(10);
while(!KEY_EN);
Led8Neg(); // 點(diǎn)亮LED // Led狀態(tài)改變一次
}
}
}
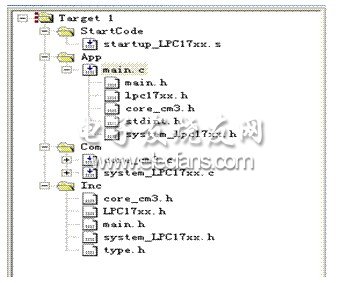
上一節(jié)對程序沒有做過多的解釋,這里詳細(xì)分析一下,工程中包含的源文件如下圖所示:
?
工程中startup_LPC17XX.s是M3的啟動(dòng)文件,啟動(dòng)文件由匯編語言寫的,它的作用一般是下面這幾個(gè):
1)堆和棧的初始化
2)向量表定義
3)地址重映射及中斷向量表的轉(zhuǎn)移
4)設(shè)置系統(tǒng)時(shí)鐘頻率
5)中斷寄存器的初始化
6)進(jìn)入C應(yīng)用程序
工程中main.c是我寫的應(yīng)用程序,也就是這次實(shí)驗(yàn)的程序,core_cm3.c與core_cm3.h主要是M3外圍驅(qū)動(dòng)源代碼與頭文件,使用時(shí)一般不需要修改,直接調(diào)用就可以。system_LPC17xx.c與system_LPC17xx.h是關(guān)于系統(tǒng)的文件,里面主要提供了系統(tǒng)初始化函數(shù)SystemInit(),文件中默認(rèn)情況下定義的晶振的大小為12M,使用的是外部晶振,還使用了PLL0倍頻,關(guān)于倍頻的問題,以后慢慢再總結(jié)。芯片LPC1768的初始化主要包括時(shí)鐘配置,電源管理,功耗管理等。相比較而言,時(shí)鐘配置相對復(fù)雜,因?yàn)樗▋蓚€(gè)PLL倍頻電路,一個(gè)是主PLL0主要是為系統(tǒng)和USB提供時(shí)鐘,另一個(gè)是PLL1專門為USB提供48M時(shí)鐘,但也可以不使用它們。由于時(shí)鐘配置比較靈活,所以相以設(shè)置這些參數(shù)也比較復(fù)雜,但是這些在系統(tǒng)文件中已有明確的定義,所以想要變動(dòng)時(shí)只需修改系統(tǒng)文件中相應(yīng)的宏或函數(shù)即可。
下面簡要總結(jié)一下main()函數(shù),首先是系統(tǒng)初始化函數(shù)SystemInit(),上面說過它在system_LPC17xx.c這個(gè)源文件中,這個(gè)函數(shù)主要完成了對時(shí)鐘的配置,系統(tǒng)功耗PCONP,時(shí)鐘輸出,flash加速等系統(tǒng)資源配置。如果要進(jìn)行修改可以參考源文件的修改方法,雖然是英文注釋,但都非常簡單,有興趣的可以打開看看,不過一般情況下我們拿來直接用就好了不用修改的。
函數(shù)SysTick_Config(SystemFrequency/1000 - 1) 是用來配置系統(tǒng)時(shí)鐘節(jié)拍的,它的原型在core_m3.c這個(gè)源文件中。實(shí)驗(yàn)程序中用的延時(shí)函數(shù)都是硬件延時(shí),其實(shí)就是系統(tǒng)節(jié)拍定時(shí)器所產(chǎn)生的。使用硬件延時(shí)的原因是1、不占用軟件系統(tǒng)資源,2、比較精確。系統(tǒng)定時(shí)器配置很簡單,使用也很方便,專為系統(tǒng)軟件或系統(tǒng)管理軟件提供間隔中斷。系統(tǒng)節(jié)拍定時(shí)器的時(shí)鐘源可以是內(nèi)核時(shí)鐘也,可以是外部時(shí)鐘,外部時(shí)鐘P3.26腳引入,當(dāng)然想從這個(gè)引腳輸入時(shí)鐘,需要將這個(gè)引腳先配置成STCLK功能。系統(tǒng)節(jié)拍定時(shí)器是一個(gè)24位定時(shí)器,當(dāng)計(jì)數(shù)值達(dá)到0時(shí)產(chǎn)生中斷。系統(tǒng)節(jié)拍定時(shí)器的功能就是為下一次中斷提供前提供一個(gè)固定時(shí)間間隔。由于節(jié)拍定時(shí)器是24位的,所以使用時(shí)不能與其它定時(shí)器混為一談,一定要注意定時(shí)時(shí)長的限制,不能超過界限。
最后再說一下數(shù)據(jù)類型的問題,在8位機(jī)中數(shù)據(jù)位找一般就是8位的所以,定義變量時(shí)一般選用單字節(jié)處理速度會(huì)快些,但到了32位機(jī)中,數(shù)據(jù)位寬一般是32位的,所以定義變量時(shí)一般用4字節(jié)會(huì)好些。在core_cm3.c中有關(guān)于數(shù)據(jù)類型的定義,有興趣的可以打開看看。
?????? 無論是哪款單片機(jī)應(yīng)該都有對應(yīng)的中斷的功能,中斷在嵌入式系統(tǒng)的地位毋庸置疑。LPC1768微處理器包括4個(gè)外部中斷,分別是EINT0、EINT1、EINT2、EINT3對應(yīng)的引腳分別是P2.10~P2.13,這幾個(gè)引腳也可以作為通用IO口使用。名個(gè)外部中斷可以設(shè)置成低電平/高電平或上升沿/下降沿有效,它們還有一個(gè)功能就是可用于將處理器從睡眠、深度睡眠或掉電模式中喚醒。涉及到外部中斷的寄存器主要有以下幾個(gè):
寄存器名稱描述功能默認(rèn)值
EXTINT外部中斷標(biāo)志寄存器設(shè)置或查看中斷標(biāo)志0x00
EXTMODE外部中斷模式寄存器設(shè)置電平觸發(fā)或邊沿觸發(fā)0x00
EXTPOLAR外部中斷極性寄存器設(shè)置為高/低電平或上升/下降沿觸發(fā)0x00
PINSEL4引腳功能選擇寄存器選擇P2引腳的功能0x00
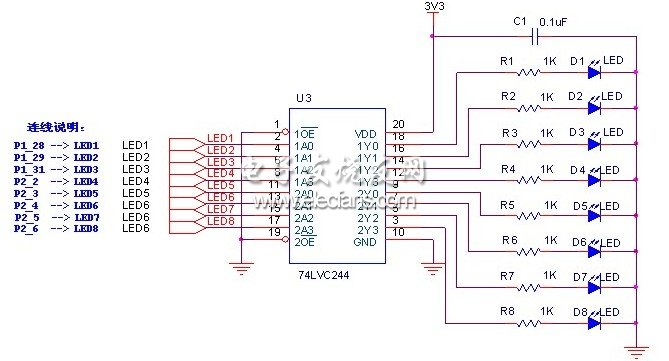
因?yàn)閷?shí)驗(yàn)選用中斷方式而非查詢方式來測試中斷,因中P2.10口接有一個(gè)按鍵,所以就用這個(gè)按鍵來作個(gè)簡單的中斷實(shí)驗(yàn),由于是選用的是下降沿觸發(fā),所以還涉及一個(gè)寄存器:IO2IntenF這個(gè)寄存器的功能是使能P2口的下降沿中斷功能。因?yàn)橹皇菍?shí)驗(yàn),所以電路很簡單,還是使用的前兩次用的電路圖,如下所示:
?
圖1 LED指示電路
還有一個(gè)電路,其實(shí)就是在P2.10口上接了一個(gè)輕工觸按鍵,以觸發(fā)外部中斷,這里就不上圖了。好了,由于實(shí)驗(yàn)內(nèi)容簡單,下面給出中斷程序,關(guān)于主程序有興趣的話可以參看附件中的,里面有完整的Real MDK4.10建立的工程工件:
/*********************************************************************************
文件名稱:extint.c
功 能: LPC1768的外部中斷函數(shù)
編譯環(huán)境: MDKV4.12
時(shí) 鐘: 外部12Mhz
日 期: 11/08/18
作 者: 懶貓愛飛
備 注:NULL
---------------------------------------------------------------------------------
修改內(nèi)容:NULL
修改日期:XXXX年xx月xx日 xx時(shí)xx分
修改人員:xxx xxx xxx
**********************************************************************************/
#include "includes.h"
volatile uint32_t eint0_counter = 8; // 初始化時(shí)第一個(gè)燈亮
/********************************************************************************
* 函數(shù)名稱:void EINT0_IRQHandler (void)
* 函數(shù)功能: 外部中斷0函數(shù)入口
* 入口參數(shù): 無
* 出口參數(shù): 無
* 備 注:無
*******************************************************************************/
void EINT0_IRQHandler (void)
{
SC -> EXTINT = EINT0; /* 清中斷*/
switch(eint0_counter%8)
{
case 0: Led1Neg(); /* LED1狀態(tài)取反*/
break;
case 1: Led2Neg(); /* LED2狀態(tài)取反*/
break;
case 2: Led3Neg(); /* LED3狀態(tài)取反*/
break;
case 3: Led4Neg(); /* LED4狀態(tài)取反*/
break;
case 4: Led5Neg(); /* LED5狀態(tài)取反*/
break;
case 5: Led6Neg(); /* LED6狀態(tài)取反*/
break;
case 6: Led7Neg(); /* LED7狀態(tài)取反*/
break;
case 7: Led8Neg(); /* LED8狀態(tài)取反*/
break;
default:break;
}
eint0_counter++; /* 計(jì)數(shù)值加1 */
}
/********************************************************************************
* 函數(shù)名稱:uint32_t EINTInit( void )
* 函數(shù)功能: 外部中斷0初始化函數(shù)
* 入口參數(shù): 無
* 出口參數(shù): 返回TURE或FALSE
* 備 注:如果是返回false則說明中斷入口函數(shù)沒有在中斷向量表中建立
*******************************************************************************/
uint32_t EINTInit( void )
{
PINCON -> PINSEL4 = 0x00100000; /* 將P2.10腳設(shè)置為EINT0即第二功能*/
GPIOINT -> IO2IntEnF = 0x200; /* 設(shè)置為下降沿觸發(fā)*/
SC -> EXTMODE = EINT0_EDGE; /* 外部中斷模式選擇為邊沿觸發(fā)*/
SC -> EXTPOLAR = 0; /* 外部中斷1極性設(shè)置,此處選默認(rèn)的低電平或下降沿*/
NVIC_EnableIRQ(EINT0_IRQn); /* 使能外部中斷0 */
return( TRUE );
}
這個(gè)程序只有兩個(gè)函數(shù),一個(gè)是中斷處理函數(shù),沒有什么不好理解,在這里不總結(jié),關(guān)于中斷初始化函數(shù),前面都是設(shè)置相關(guān)的中斷寄存器的,關(guān)于寄存器是怎么設(shè)置的可以看一下LPC1768的手冊,上面都有詳細(xì)的說明,在這里不再碼字總結(jié)。關(guān)于void NVIC_EnableIRQ(IRQn_Type IRQn)這個(gè)函數(shù),它在core_cm3.h中有定義,其實(shí)就是設(shè)置中斷使能寄存器ISER,從名字就可以看出來了,它的功能就是使能中斷。這次外部中斷沒有用查詢的方式,查詢方式的原理就是設(shè)置好中斷,使能中斷,然后主程序一直查詢中斷位是否有中斷,然后再執(zhí)行相應(yīng)的措施。








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論