 電子發(fā)燒友App
電子發(fā)燒友App


閱讀相關(guān)系列章節(jié)
單片機關(guān)鍵技術(shù)基礎(chǔ)詳解(一)
單片機關(guān)鍵技術(shù)基礎(chǔ)詳解(二)
? ? ? ?作為經(jīng)驗豐富的嵌入式系統(tǒng)的開發(fā)人員,既有大型系統(tǒng)的經(jīng)驗(波音777飛行控制)又有小型單人項目(筆記本電腦熱風(fēng)扇控制)經(jīng)驗,應(yīng)避開單臺機器或語言的具體利弊,將更多的時間花在應(yīng)用程序設(shè)計和構(gòu)建上,并且獨立于語言和CPU內(nèi)核。這方面部分來自于對類似系統(tǒng)的工作,只是“再用于“下一個項目(雖然要求完全不同,并且切換到了微控制器)。我也參與過由幾個獨立的設(shè)備組成的系統(tǒng),每個設(shè)備都有自己的程序和微控制器,各部分經(jīng)常在不同的子項目之間來回使用:某個子項目中的編碼器可能是另一個項目的測試器,或當(dāng)完成自己的子項目的編碼后,會投入另一個子項目,以幫助完成項目。缺乏基于系統(tǒng)的設(shè)計方法會覺得這些情況很困難,難以按照計劃完成。通過獨立的系統(tǒng)設(shè)計可避免機器依賴性,讓設(shè)計復(fù)用和基于團隊的設(shè)計不僅成為可能,而且加大了成功機會(如以后的增加要求)。
最近的一個項目是我更加疑慮,幾乎每次都是,必須使設(shè)計適應(yīng)(有時根本就是)所選的語言和機器。我們已經(jīng)以某個系統(tǒng)架構(gòu)和設(shè)計開始,只是按一般方式考慮了集成微控制器及其外圍設(shè)備,我們只關(guān)注我們需要什么并不關(guān)心它是如何實現(xiàn)的,至少我們是這么認(rèn)為的。我們選擇了一些非常專業(yè)外設(shè)的新器件,并且開始編碼時,發(fā)現(xiàn)需要花費大量的時間來了解如何構(gòu)建硬件,以及如何根據(jù)需求最好地利用。當(dāng)我們發(fā)現(xiàn)好的方式來利用設(shè)備的某特征時,設(shè)備的此特點通過代碼嵌入了系統(tǒng)級設(shè)計。我們已不再堅持我們的系統(tǒng),不得不讓機器和具體操作改變了系統(tǒng)設(shè)計。于是只好停下來檢查問題和實施方案,通過系統(tǒng)重新設(shè)計分離出依賴機器的“修復(fù)”,然后將“修復(fù)”融入系統(tǒng)四周的“包裝”中。
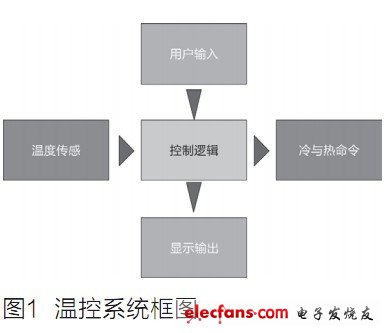
當(dāng)設(shè)計某個應(yīng)用時(甚至單一微控制器),以調(diào)溫器為例,有一個創(chuàng)建好了的系統(tǒng)級視圖,描述了硬件和實施某種方式的應(yīng)用程序。該視圖用于多種用途,例如,可作為與高層管理人員或另一個小組進(jìn)行交流的工具(不希望知道所有細(xì)節(jié)),如自動化測試人員。如果僅將其視為“視圖”而不是系統(tǒng)設(shè)計,并且實施不是從系統(tǒng)設(shè)計自上而下,而是將其用作起點,則問題就出現(xiàn)了。考慮圖1所示的溫控系統(tǒng)。
?
顯示系統(tǒng)相對簡單,卻反映了許多嵌入式產(chǎn)品設(shè)計。在“溫度傳感”部分包含溫度輸入,其輸出進(jìn)入主系統(tǒng)“控制邏輯”部分。“控制邏輯”的其它輸入是標(biāo)記“用戶輸入”的部分,代表人機接口,大概設(shè)置了恒溫器的溫度調(diào)節(jié)。“控制邏輯”部分根據(jù)這些輸入確定了如何命令供暖、通風(fēng)和空調(diào)(HVAC)系統(tǒng),以保持恒溫器設(shè)定的溫度,將這些命令發(fā)送到“熱與冷命令”部分。最后一個部分是“顯示輸出”,將當(dāng)前系統(tǒng)狀態(tài)傳遞到用戶。當(dāng)前系統(tǒng)狀態(tài)的一部分是恒溫設(shè)置,另一部分是最新的溫度讀數(shù),最后部分是正在執(zhí)行的命令,以迫使溫度返回恒溫設(shè)置(即加熱、冷卻和/或打開或關(guān)閉風(fēng)扇)。
正如前面所述,這是一個直接和相對簡單的應(yīng)用,非常簡單以至于不需要考慮系統(tǒng),而是很自然地跳到實施(我相信大多數(shù)讀者甚至可以說出最喜歡的微控制器供應(yīng)商的型號)。可以是用于次級市場的高端PC游戲圖形系統(tǒng)的墻恒溫器或溫度管理裝置。用于墻恒溫器的微控制器的具體實施基本不需用于圖形系統(tǒng)。重點是,無論設(shè)計顯得多么簡單,都有很好的理由先設(shè)計系統(tǒng),然后實現(xiàn)它。將其盡量設(shè)計成適合通常應(yīng)用。
開始時,需要考慮理想的系統(tǒng)設(shè)計,然后生成layers,在理想的系統(tǒng)和實際實施之間構(gòu)建wrappers(有時是雜亂的)。“控制邏輯”部分作為框圖的核心是有充分理由的-因為它是系統(tǒng)的內(nèi)核。周圍的每個部分都服務(wù)于“控制邏輯”部分,要根據(jù)需要提供“服務(wù)”。
應(yīng)自“溫度傳感器”部分開始。其理由是獲得當(dāng)前/瞬時溫度,并以一致的格式提供出來。從“控制邏輯”的角度來看,其作用是“獲取溫度”,并以格式化的值(xxx.xx攝氏度)返回當(dāng)前溫度值。溫度傳感器部分的硬件wrappers將包括實施中任何需要用來將原溫度傳感輸入“翻譯”成預(yù)期格式的攝氏度。這可能意味著需要考慮獲得新讀數(shù)的最佳時間,如果溫度讀數(shù)中有太多的噪音(無論何種原因),應(yīng)添加過濾算法,并且如果溫度硬件出現(xiàn)故障,應(yīng)采用決策邏輯。重點是,“溫度傳感器”部分的輸出是什么,而且傳遞到“控制邏輯”應(yīng)為理想的溫度,所有的噪音,實際隱藏的細(xì)節(jié)都應(yīng)很容易的由wrapper代替。
如果設(shè)計需要從系統(tǒng)中三個不同的點測量三個溫度值(對于計算機箱內(nèi)的計算機很普遍)怎么辦?處理這三個溫度是控制邏輯問題(例如,何時多路輸出也將受到控制)?如果是這樣,從1個溫度轉(zhuǎn)換到3個溫度首先意味著“溫度傳感器”部分要更新,以提供3個溫度和為每個溫度實施創(chuàng)建的wrappers(允許多種類型的輸入),然后控制邏輯也因為多個輸出而更新。這可能意味著三個不同的“GetTemperature_n”服務(wù)或需要更新服務(wù)以確定是識別哪個溫度的參量。
如果三個溫度僅僅用于加權(quán)以得到一個“更真實”的系統(tǒng)溫度,控制邏輯不需要改變,只需將含wrappers的溫度傳感塊以統(tǒng)一格式輸入這三個溫度,然后通過一個wrappers來對這三個溫度進(jìn)行加權(quán),生成控制邏輯所需的單一溫度。這種方法易于包含來自不同的溫度輸入(例如,圖形處理器的二極管結(jié)測量和連接到PCB的模擬熱敏電阻),因為wrappers將系統(tǒng)邏輯與硬件隔離開。
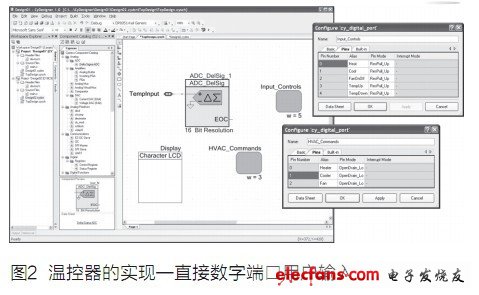
讓我們以兩個不同的實現(xiàn)例子驗證這個論點:一個用于墻恒溫器,另一個是顯卡上的溫度控制子系統(tǒng)。首先對于墻恒溫器,如圖2所示,假定使用基于8051的賽普拉斯PSoC3設(shè)備。“溫度傳感器”部分的硬件由連接到ADC(16位Δ-Σ轉(zhuǎn)換器)的熱敏電阻組成。“用戶輸入”部分的硬件由5個常開按鍵開關(guān)組成,一邊連接到電路接地端,另一邊連接到含內(nèi)部上拉電阻的5輸入數(shù)字端口。“熱和冷命令”模塊的硬件部分包括三個功率場效應(yīng)管,由配置為開漏低輸出的3輸出端口驅(qū)動。最后,“顯示輸出”塊的硬件實現(xiàn)是串行字符液晶顯示器,能夠根據(jù)需要顯示字母數(shù)字字符串。
?
對于第2個應(yīng)用,即顯示卡,將用戶輸入從離散開關(guān)變?yōu)?a href="http://www.1cnz.cn/tags/i2c/" target="_blank">I2C基于寄存器的從接口(由主CPU而不是人類直接控制),并將串行LCD顯示變?yōu)镾PI-從控制顯示器(使用一系列的寄存器和指令,可能是安裝在主計算機外殼前面板上的遠(yuǎn)程變頻顯示,未安裝到顯卡上)。溫度輸入和HVAC命令保持不變。圖3顯示了早期實施的變化,假定使用基于8051的賽普拉斯PSoC3設(shè)備。

?
用戶輸入的兩種實現(xiàn)均可服務(wù)于“GetThermostatSetting”、“IsHeaterEnabled”、“IsCoolerEnabled”和“IsFanOn”。對于第一個墻恒溫器應(yīng)用,“用戶輸入”將數(shù)字端口包裝到所列的服務(wù)中,當(dāng)設(shè)備被調(diào)用時,提供端口的實時讀數(shù)(一種可能的實施)。對于另一個應(yīng)用,基于I2C從機的實現(xiàn),相同的服務(wù)將來自I2C主機寫入的寄存器的最新值返回到“控制邏輯”部分,也許經(jīng)常返回也許僅在上電時返回。并且這些實現(xiàn)還有很多其它特點,包括用作切換鍵的墻上按鈕開關(guān)而不是瞬間讀數(shù),甚至在“用戶輸入”部分的wrappers深層進(jìn)行邊沿觸發(fā)異步處理。
綜合上述的關(guān)鍵是:系統(tǒng)設(shè)計隱藏了硬件細(xì)節(jié);硬件和實施細(xì)節(jié)被系統(tǒng)設(shè)計包裝并隱藏。通過外端設(shè)計(即代碼)的實施細(xì)節(jié),可以保護這些應(yīng)用實現(xiàn)時避免分裂,可以做到個性化的設(shè)計,權(quán)衡利弊,保證項目成功交付,并仍然能夠提供可復(fù)用性和組設(shè)計。不要讓賣方牽引注意力——先設(shè)計系統(tǒng),然后加強保護系統(tǒng)設(shè)計實現(xiàn)細(xì)節(jié)不被抄襲。
二、單片機設(shè)計與KeilC編程總結(jié)
1基本原則
質(zhì)量是關(guān)鍵。沒有人會對很差的工作感到滿足。當(dāng)完成高質(zhì)量的工作時,你會為此而感到驕傲。不管你是否知道,你都會因為你的高質(zhì)量工作而得到信譽。因此,要想為自己所做的事感到驕傲,就需要建立個人標(biāo)準(zhǔn),并為達(dá)到這一標(biāo)準(zhǔn)而努力奮斗。在達(dá)到這些標(biāo)準(zhǔn)時,再提高標(biāo)準(zhǔn)并繼續(xù)努力。挑戰(zhàn)自己去完成更優(yōu)良的工作,你將會為自己的成就而感到驚訝。
1.1 了解單片機的能力
【規(guī)則1】設(shè)計滿足要求的最精簡的系統(tǒng)。
正確估計單片機的能力,知道單片機能做什么,最大程度的挖掘單片機的潛力對一個單片機系統(tǒng)設(shè)計者來說是至關(guān)重要的。我們應(yīng)該有這樣一個認(rèn)識,即單片機的處理能力是非常強大的。早期的PC 機,其CPU(8086)處理能力和8051 相當(dāng),卻能處理相當(dāng)復(fù)雜的任務(wù)。單片機的能力的關(guān)鍵就在軟件設(shè)計者編寫的軟件上。只有充分地了解到單片機的能力,才不會做出“冗余”的系統(tǒng)設(shè)計。而采用許多的外圍芯片來實現(xiàn)單片機能實現(xiàn)的功能。這樣做即增加了系統(tǒng)成本,也可能會降低了系統(tǒng)的可靠性。
1.2 系統(tǒng)可靠性至關(guān)重要
【規(guī)則2】使用看門狗。
看門狗電路通常是一塊在有規(guī)律的時間間隔中進(jìn)行更新的硬件。更新一般由單片機來完成,如果在一定間隔內(nèi)沒能更新看門狗,那看門狗將產(chǎn)生復(fù)位信號,重新復(fù)位單片機。更新看門狗的具體形式多是給看門狗芯片相關(guān)引腳提供一個電平上升沿或讀寫它的某個寄存器。使用看門狗電路將在單片機發(fā)生故障進(jìn)行死機狀態(tài)時,重新復(fù)位單片機。當(dāng)前有多種看門狗的芯片,如MAXIM 公司的MAX802,MAX813等。而且,有好多種單片機中本身就集成有看門狗。一個外部的看門狗是最好的,因為它不依賴于單片機。如果可能的話,看門狗更新程序不應(yīng)該放在中斷或是子程序中,原則上應(yīng)該放在主程序中。我曾經(jīng)見過一個工程師,他所調(diào)試的程序在運行時偶而會引起看門狗的復(fù)位動作,于是他干脆在每10ms 就中斷一次的時鐘中斷程序中清看門狗。我相信他也知道使看門狗失去作用,可他卻沒有不是去查明引起這個現(xiàn)象的真正原因。因此,我想提醒大家:不論什么理由,絕對不要忽略系統(tǒng)故障的真正原因。高質(zhì)量的產(chǎn)品來自于高素質(zhì)的工程師,高質(zhì)量的產(chǎn)品造就高素質(zhì)的工程師。
【規(guī)則3】確定系統(tǒng)的復(fù)位信號可靠。
這是一個很容易忽略的問題。當(dāng)你在設(shè)計單片機系統(tǒng)時,你腦中有這個概念嗎?什么樣的復(fù)位信號才是可靠的嗎?你用示波器查看過你設(shè)計的產(chǎn)品的復(fù)位信號嗎?不穩(wěn)定的復(fù)位信號可能會產(chǎn)生什么樣的后果?你有沒有發(fā)現(xiàn)過你所設(shè)計的單片機系統(tǒng),每次重新上電啟動后,數(shù)據(jù)變得亂七八糟,并且每一次現(xiàn)象并不相同,找不出規(guī)律,或者有時候干脆不運行,或者有時候進(jìn)入一種死機狀態(tài),有時候又一點事都沒有正常運行?在這種情況下,你應(yīng)該查一下你的系統(tǒng)的復(fù)位信號。一般在單片機的數(shù)據(jù)手冊(Datasheet)中都會提到該單片機需要的復(fù)位信號的要求。一般復(fù)位信號的寬度應(yīng)為。復(fù)位電平的寬度和幅度都應(yīng)滿足芯片的要求,并且要求保持穩(wěn)定。還有特別重要的一點就是復(fù)位電平應(yīng)與電源上電在同一時刻發(fā)生,即芯片一上電,復(fù)位信號就已產(chǎn)生。不然,由于沒有經(jīng)過復(fù)位,單片機中的寄存器的值為隨機值,上電時就會按PC 寄存器中的隨機內(nèi)容開始運行程序,這樣很容易進(jìn)行誤操作或進(jìn)入死機狀態(tài)。
【規(guī)則4】確定系統(tǒng)的初始化有效。
系統(tǒng)程序開始應(yīng)延時一段時間。這是很多單片機程序設(shè)計中的常用方法,為什么呢?因為系統(tǒng)中的芯片以及器件從上電開始到正常工作的狀態(tài)往往有一段時間,程序開始時延時一段時間,是讓系統(tǒng)中所有器件到達(dá)正常工作狀態(tài)。究竟延時多少才算合適?這取決于系統(tǒng)的各芯片中到達(dá)正常工作狀態(tài)的時間,通常以最慢的為準(zhǔn)。一般來說,延時20-100 毫秒已經(jīng)足夠。對于系統(tǒng)中使用嵌入式MODEM 等“慢熱”型的器件來說,則應(yīng)更長。當(dāng)然,這都需要在系統(tǒng)實際運行中進(jìn)行調(diào)整。
【規(guī)則5】上電時對系統(tǒng)進(jìn)行檢測。
上電時對系統(tǒng)中進(jìn)行檢測是單片機程序中的一個良好設(shè)計。在硬件設(shè)計時也應(yīng)該細(xì)細(xì)考慮將各個使用到的芯片、接口設(shè)計成容易使用軟件進(jìn)行測試的模式。很多有經(jīng)驗的單片機設(shè)計者都會在系統(tǒng)上電時(特別是第一次上電時)進(jìn)行全面的檢測,或者更進(jìn)一步,將系統(tǒng)的運行狀態(tài)中分為測試模式和正常運行模式,通過加入測試模式對系統(tǒng)進(jìn)行詳細(xì)的檢測,使得系統(tǒng)的批量檢測更為方便容易。另外要注意的是,一個簡單明了的故障顯示界面也是頗要費得心思的。比如:系統(tǒng)的外部RAM(數(shù)據(jù)存儲器)是單片機系統(tǒng)中常用的器件。外部RAM 如果存在問題,程序通常都會成為一匹脫韁的野馬。因此,程序在啟動時(至少在第一次上電啟動時)一定要對外部RAM 進(jìn)行檢測。檢測內(nèi)容包括:1)檢測RAM 中的單元。這主要通過寫入和讀出的數(shù)據(jù)保持一致。
2)檢測單片機與RAM 之間的地址數(shù)據(jù)總線。總線即沒有互相短路,也沒有連接到“地”上。另外,很多芯片,都提供了測試的方法。如串行通信芯片UART,都帶環(huán)路測試的功能。
【規(guī)則6】按EMC 測試要求設(shè)計硬件。
EMC 測試要求已經(jīng)成為產(chǎn)品的必需。有很多的文章關(guān)于這方面的。
1.3 軟件編程和調(diào)試
【規(guī)則7】盡可能使用Small 模式編譯
對比起Large 模式和Compact 模式,Small 模式能生成更為緊湊的代碼。在Small模式下,C51 編譯器將沒有使用關(guān)鍵詞,如idata、pdata、xdata 特殊聲明的變量通通放在data 單元中。在編程中,對于在的數(shù)據(jù)區(qū),可以指定放在外部存儲器中。
【規(guī)則8】在仿真前做好充分的準(zhǔn)備
單片機硬件仿真器給單片機開發(fā)者帶來了極大的方便,同時也很容易造成人的依賴性。很多時候,沒有仿真器卻能促使工程師寫出更高質(zhì)量的程序。也許在硬件仿真調(diào)試之前,下面準(zhǔn)備工作將會對你有用:
1)程序編完后,對代碼仔細(xì)逐行檢查。檢查代碼的錯誤,建立自己的代碼檢查表,對經(jīng)常易錯的地方進(jìn)行檢查。檢查代碼是否符合編程規(guī)范。
2)對各個子程序進(jìn)行測試。測試的方法:用程序測試程序,編制一個調(diào)用該子程序的代碼,建立要測試子程序的入口條件,再看看它是否按預(yù)期輸出結(jié)果。
3)如果代碼有修改,再次對代碼進(jìn)行檢查。
4)有可能的話,進(jìn)行軟件仿真——Keil C 的軟件仿真功能十分強大。軟件仿真可以防止因硬件的錯誤,如器件損壞、線路斷路或短路,而引起調(diào)試的錯誤。
5)開始硬件仿真。
【規(guī)則9】使用庫函數(shù)
重用代碼,尤其是是標(biāo)準(zhǔn)庫的代碼,而不是手工編寫你自己的代碼。這樣更快、更容易也更安全。KeilC 中提供了多個庫函數(shù),這些庫函數(shù)的用法在KeilC 的幫助文件中有詳細(xì)的描述。
【規(guī)則10】使用const。
這一點在很多經(jīng)典的關(guān)于C 和C++的書籍中是必談的要點。在《Exceptional C++》一書中,對這點有很精彩的描述,現(xiàn)摘錄如下:“沒有正確的安全意識的槍手在世界上是不可能活的很長的。const 觀念不正確的程序員也是一樣和沒有時間戴緊帽子的正確,沒有時間檢查帶電電線的電工一樣不會活的很長。”在C 語言中,const 修飾符表示告訴編譯器此函數(shù)將不會改變被修飾的變量的指向的任何值(除了強制類型轉(zhuǎn)換)。當(dāng)把指針作為參數(shù)傳遞時,總是合適地使用const,不僅可以防止你無意中錯誤的賦值,而且還可以防止在作為參數(shù)將指針傳遞給函數(shù)時可能會修改了本不想改變的指針?biāo)赶虻膶ο蟮闹怠H纾?/span>
const int num= 7;
num = 9; //有/可能得到編譯器的警告。
const char *ptr,則表示該指針?biāo)赶虻膬?nèi)容不會被改變,如果在程序中被發(fā)生對其賦值的操作,編譯時將出錯誤提示。如:
const char *ptr = “hello”;
*ptr = `H`;//錯誤,所指內(nèi)容不可改變也可將const 放在星號后面來聲明指針本身不可改變。如:
char* const ptr;
ptr++; //錯誤,指針本身不可改變
也可同時禁止改變指針和它所引用的內(nèi)容,其形式如下: const char* const ptr;
【規(guī)則11】使用static
static 是一個能夠減少命名沖突的有用工具。將只在一個模塊文件中的變量和函數(shù)使用static 修飾,將不會和其他模塊可能具有相同名稱的函數(shù)和變量在模塊連接時不會產(chǎn)生名稱沖突。一般來說,只要不是提供給其它模塊使用的函數(shù),和非全局變量,均應(yīng)使用static 修飾。將子程序中的變量使用static 修飾時,表示這個變量在程序開始時分配內(nèi)存,在程序結(jié)束時釋放,它們在程序執(zhí)行期間保持它們的值。如:
void func1(void)
{
static int time = 0;
time++
}
void func2(void)
{
static int time = 0;
time++;
}
兩個子程序中的time 變量使用static 修飾,所以它們是靜態(tài)變量,每調(diào)用一次time將進(jìn)行加1,并保持這個值。它們的功能與下面程序相似:
int time1 = 0;
int time2 = 0;
void func1(void)
{
time1++
}
void func2(void)
{
time2++;
}
我們可以看出,使用static 修飾后,模塊中的全局變量減少,使得程序的更為簡單。
【規(guī)則12】不要忽視編譯器的警告。
編譯器的給出的警告都是有的放矢,在沒有查清引起警告的真正原因之前,不要忽視它。
【規(guī)則13】注意溢出問題,寫安全的代碼。
1.4 KeilC 編程
【規(guī)則14】深入了解你所用的工具。
仔細(xì)查看KeilC 附帶的幫助文件,你能找到你期待已久的東西。KeilC 是當(dāng)前最好用的單片機開發(fā)軟件。要充分利用該軟件的功能,就必須對它深入的進(jìn)行了解。
【規(guī)則15】不要使用語言的冷僻特性,并且記住,耍小聰明會貽害無窮。最重要的是編寫你理解的代碼,理解你編寫的代碼,你就可能會做得很好。
2 推薦書目
要成為一個優(yōu)秀的單片機系統(tǒng)產(chǎn)品設(shè)計工程師,興趣、熱情、責(zé)任心至關(guān)重要。
2.1 單片機技術(shù)學(xué)習(xí)
《微機原理及應(yīng)用(從16 位到32 位) 》戴梅萼等著清華大學(xué)出版社。學(xué)校教材,也是當(dāng)年我學(xué)習(xí)單片機的啟蒙書。
2.2 C51 編程學(xué)習(xí)
《單片機高級語言C51 Windows 環(huán)境編程與應(yīng)用》作者:徐愛鈞彭秀華電子工業(yè)出版社。這本書幾乎覆蓋了C51 編程的方方面面,最新版本對當(dāng)前使用最廣的keilC 也有很詳細(xì)的講述。對于剛學(xué)C51 編程的同志,本書是上上之選,強力推薦。比起現(xiàn)今書市上的所謂什么“C51 編程圣經(jīng)”之類的書強得多。
2.3 C 語言編程必讀
《C 陷阱與缺陷》Andrew Koenig 著
《C 專家編程》Peter Van Der Linden 著
C 語言開發(fā)技術(shù)經(jīng)典之作,C 程序員必讀之書,數(shù)十年來經(jīng)久不衰。如果你想對C語言全面的掌握,真正了解C 語言的精髓,這兩本書是必讀之作。由人民郵電出版社出版的中文譯本也還不錯。
2.4 程序設(shè)計技術(shù)方面
《數(shù)據(jù)結(jié)構(gòu)》 嚴(yán)蔚敏 清華大學(xué)出版社。清華大學(xué)出版社的教材質(zhì)量穩(wěn)定,中規(guī)中矩,價格相對來說也便宜一點。
《程序設(shè)計實踐》Brian W. Kernighan Rob Pike 著;《代碼大全》
三、MCS-51單片機終端及外中斷軟件編程
?
MCS-51單片機有多個中斷源,以8051為例,有5個中斷源,兩個外中斷、兩個定時中斷和一個串行中斷,這一節(jié)我們討論外中斷軟件編程。
外中斷是由外部原因引起的中斷,有兩個中斷源。即外中斷0(INT0)和外中斷1(INT1),中斷請求信號由引腳P3.2(INT0)和P3.3(INT1)輸入。
外中斷請求信號有兩種方式,一是電平方式,二是脈沖方式。可通過有關(guān)控制位的定義進(jìn)行規(guī)定。
電平方式為低電平有效,只需在單片機的(INT0)和(INT1)中斷請求輸入端采樣到有效的低電平時,就會激活外部中斷。
脈沖方式則在脈沖的后負(fù)跳沿有效,即在相鄰兩個機器周期對中斷請求引入端進(jìn)行采樣中,如前一次為高,后一次為低即為有效中斷請求。這就要求在這種中斷方式,中斷請求信號的脈沖寬度必須大于一個機器周期,以保證電平變化能被單片機采樣到。
定時器控制寄存器 (TCON)
外中斷請求方式的控制位在定時控制寄存器TCON(地址為88H)中的位88(IT0)和位8A(IT1)兩個位,當(dāng)IT0(IT1)=0為電平方式,IT0(IT1)=1為脈沖方式。同時在此寄存器中的位89(IE0)和位8B(IE1)為外中斷請求標(biāo)志位,當(dāng)CPU采樣到INT0(INT1)端出現(xiàn)有效中斷請求時,此位由硬件置1。在中斷響應(yīng)完成后轉(zhuǎn)向中斷服務(wù)時,再由硬件自動清0。

下面我們對有關(guān)控制位作說明:
·EA——中斷允許總控制位,EA=0,中斷總禁止,禁止所有中斷。EA=1,中斷總允許,總允許位打開后,各中斷的允許或禁止由各中斷允許控制位設(shè)置決定。
·EX0(EX1)——外部中斷允許控制位,EX0(EX1)=0,禁止外部中斷。EX0(EX1)=1,允許外部中斷。
·ET0(ET1)——定時/計數(shù)中斷允許控制位,ET0(ET1)=0,禁止定時/計數(shù)中斷。ET0(ET1)=1,允許定時/計數(shù)中斷。
·ES——串行中斷允許控制位,ES=0,禁止串行中斷。ES=1,允許串行中斷。
中斷的允許和禁止就是中斷的開放和關(guān)閉,中斷允許就是開放中斷,中斷的禁止就是關(guān)閉中斷。從以上說明我們可看出,MCS-51的中斷允許是通過兩級控制的,以EA位作為總中斷控制位,以各中斷控制位為分控制位。當(dāng)總中斷位為禁止?fàn)顟B(tài)時,不管分控制位是允許或禁止整個中斷都是禁止的。只有當(dāng)EA=1(允許)時,才能由各分控制位設(shè)置各自的中斷允許與禁止。MCS-51單片機復(fù)位后,IE=00H,因此中斷處于禁止?fàn)顟B(tài)。
值得一提的是:單片機中斷響應(yīng)后不會自動關(guān)閉中斷,因此在轉(zhuǎn)入中斷服務(wù)程序后,應(yīng)由軟件指令禁止中斷。
中斷優(yōu)先級控制寄存器 (IP)
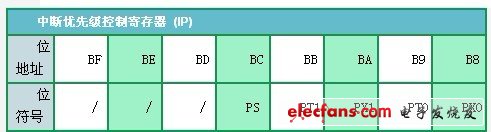
MCS-51的中斷優(yōu)先級控制比較簡單,只設(shè)置了高、低兩個級別的有限級,各中斷源的優(yōu)先級別由優(yōu)先寄存器(IP)進(jìn)行控制。
·PX0——外中斷0(INT0)優(yōu)先級控制位。
·PT0——定時中斷0(T0)優(yōu)先級控制位。
·PX1——外中斷1(INT1)優(yōu)先級控制位。
·PT1——定時中斷1(T1)優(yōu)先級控制位。
·PS ——串行中斷(ES)優(yōu)先級控制位。
控制位=0,優(yōu)先級為低。控制位=1,優(yōu)先級為高。
中斷優(yōu)先級是為了中斷嵌套服務(wù)的,控制原則為:
(1) 低優(yōu)先級中斷不能打斷高優(yōu)先級的中斷服務(wù),而高優(yōu)先級的中斷服務(wù)可以打斷低優(yōu)先級的中斷服務(wù)。
(2) 同級的中斷已經(jīng)響應(yīng),其他中斷將被禁止。
(3) 如果同級的多個中斷源同時出現(xiàn),CPU將按查詢次序確定哪個中斷被響應(yīng),次序為:外中斷0→定時中斷0→外中斷1→定時中斷1→串行中斷。
中斷控制寄存器的狀態(tài)設(shè)置
在應(yīng)用中,我們可以通過相應(yīng)的控制寄存器來使用中斷系統(tǒng),因此從使用的角度上看,這些控制寄存器是面向用戶的。這些控制寄存器既可以進(jìn)行字節(jié)尋址,也可以進(jìn)行位尋址,也就是對位狀態(tài)的尋址既可以使用字節(jié)操作指令也可以使用位操作指令,例如:
MOV IE,#81H
如使用位操作指令,也可寫為:
SETB EA
SETB EX0
對于一般的外中斷程序,我們可以這樣安排:
ORG 0000H ;主程序入口
START: AJMP MAIN
ORG 0003H ;外中斷程序入口
AJMP INT00
MAIN: MOV IE,#81H ;允許總中斷和外中斷
…… ;主程序
……
……
INT00: …… ;外中斷服務(wù)程序
……
RETI ;中斷返回
?
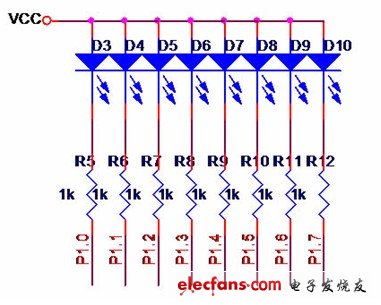
四、STC89C52最小系統(tǒng)
自己動手做了一個STC89C52單片機最小系統(tǒng)板,下面是實物圖!下面是原理圖,拿出來僅供參考.
單片機部分

單片機與PC機接口部分

測試部分
現(xiàn)在就做的過程中遇到的問題說一下.
1. 線路連接問題: 這個問題只要仔細(xì)一點應(yīng)該沒有什么問題.
2.電容選擇問題: 在這里很容易出問題,一般要選好一點的電容,具體參數(shù)一定要根據(jù)電平轉(zhuǎn)換芯片類型而定. 我在這里選的是電解電容.剛開始用的是瓷片電容,發(fā)現(xiàn)不太好用,程序下載不進(jìn)去,所以推薦大家用好一點的電容
3.電平轉(zhuǎn)換芯片最好用進(jìn)口的,國內(nèi)的不怎么好用.據(jù)說容易出問題(自己沒有用過,我用的是美信公司的).可以通過測第2腳和第6腳的電壓來確定電路是否正常工作,一般第2腳電壓為+8.6伏到+10伏之間,第6腳為-8.6伏到-10伏之間.
4.還有當(dāng)時犯了一個很幼稚的錯誤,就是沒有搞清接口是公頭還是母頭(公頭的輸出線正好是母頭的輸入線)
5.下載的時候先點下載,然后再給單片機上電!











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論