 電子發(fā)燒友App
電子發(fā)燒友App


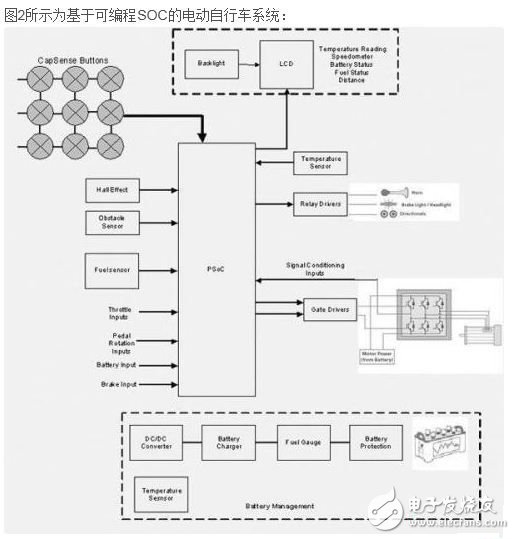
可編程SOC器件不但可作為電機控制、模擬測量以及直接驅(qū)動LCD顯示屏的統(tǒng)一電路板系統(tǒng)用于電動自行車應(yīng)用,而且還能支持電容式感應(yīng)技術(shù)以取代鍵盤上的機械按鍵。此外,SOC器件還能利用內(nèi)部PWM、MUX和比較器來驅(qū)動和控制三相電機,利用內(nèi)部ADC和PGA來支持傳感器輸入電池監(jiān)控,以及利用熱敏電阻或RTD等溫度感應(yīng)器件來實現(xiàn)溫度感應(yīng)。該器件不但能直接驅(qū)動繼電器,以支持剎車燈、車頭燈和轉(zhuǎn)向燈,而且能直接驅(qū)動LCD顯示屏,以顯示溫度、電池狀態(tài)、速度、騎行距離及各種錯誤/警告消息等。
采用基于IDE的工具,可為SoC設(shè)計出各種界面和邏輯。這些工具還能提供直接可用的組件模塊,可用于設(shè)計更為復(fù)雜的邏輯,如監(jiān)控界面的電容式傳感器、支持模擬傳感器和其它輸入的ADC、驅(qū)動蜂鳴器的PWM、DAC以及段式、字符或圖形化LCD顯示屏等。因此,利用可編程SOC,電動自行車系統(tǒng)的開發(fā)和生產(chǎn)成本能夠大幅降低。
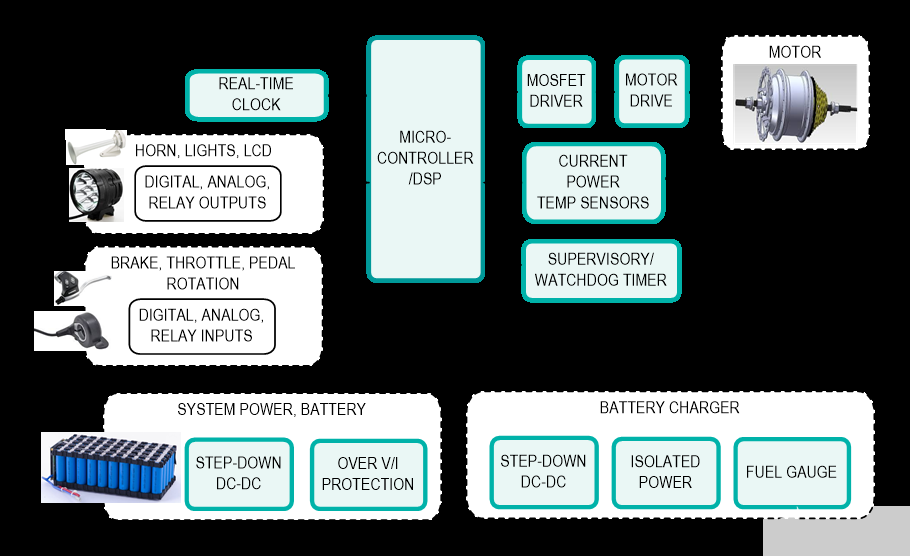
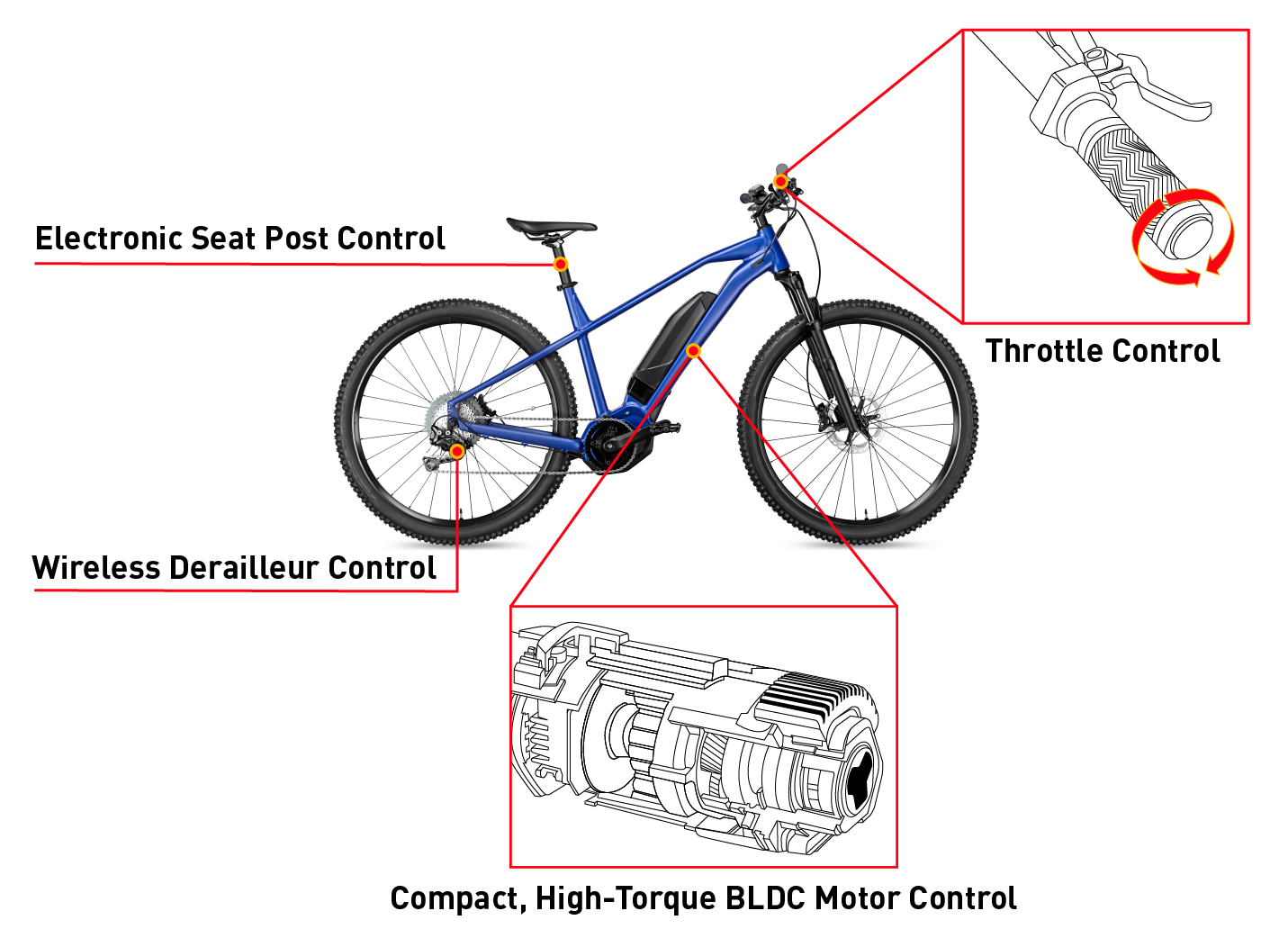
微控制器:微控制器通常用于不同傳感器輸入檢測(如節(jié)流閥輸入、溫度傳感器、電池輸入、燃料傳感器、障礙傳感器等)、模數(shù)轉(zhuǎn)換、輸出比較組件等,并可驅(qū)動和控制三相無刷車用電機。采用電池供電的電動自行車系統(tǒng)需要超低功耗的微控制器。此外,微控制器也是中控鎖系統(tǒng)的一部分,可用來與車輛中使用的各種不同外部器件進(jìn)行通信。無論何時剎車,均可使用微控制器來自動停止電機旋轉(zhuǎn),從而避免電機磨損剎車片的速度超過標(biāo)準(zhǔn)的人力自行車。
輪轂電機:通常情況下,無論有無傳感器(基于霍爾效應(yīng)),均可采用無刷電機實現(xiàn)高效可靠的運行工作。
可再充電的鉛酸/鋰離子電池:電動自行車應(yīng)用采用了從鉛酸電池到鋰電池等多種不同的電池類型。其中,可再充電的鉛酸電池在電動車中的應(yīng)用極其廣泛。
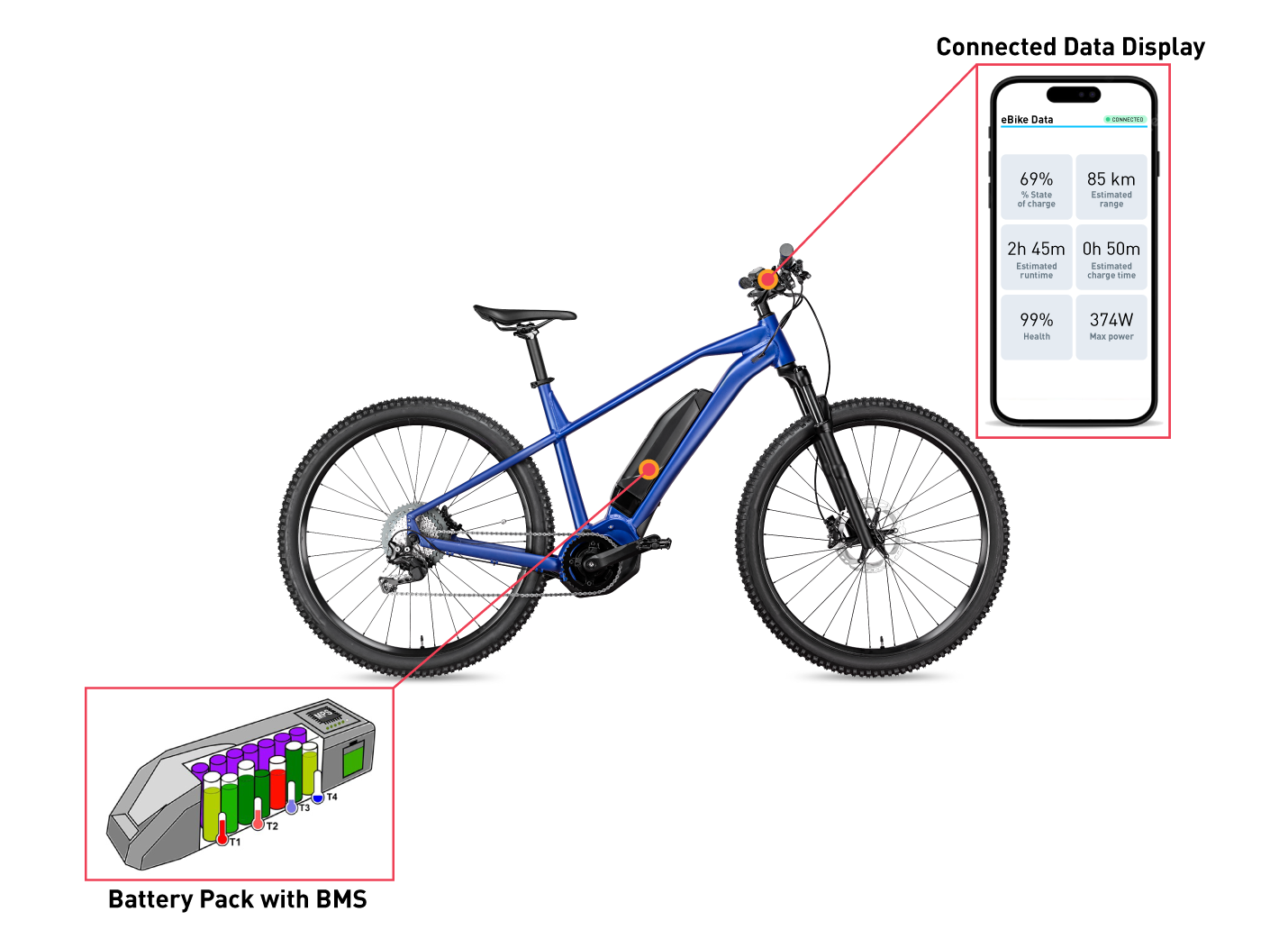
顯示屏與鍵盤:通常情況下,采用帶背光的LCD顯示屏不但能顯示溫度、電池輸入、速度、騎行距離及錯誤/警告消息等,而且還能顯示腳踏板輔助系統(tǒng)和能量生成的等級。電動車應(yīng)用中也采用基于機械按鍵的鍵盤,而且鍵盤還可支持保護(hù)電動車的防盜功能。
電源管理:這個子系統(tǒng)可為各功能模塊的運行提供電源,并監(jiān)控電池工作。帶比較器和分立邏輯的主機微控制器可用來管理鉛酸電池。此外,這種方法也能為微控制器和用戶提供關(guān)于電池的安全和關(guān)鍵信息。
原理
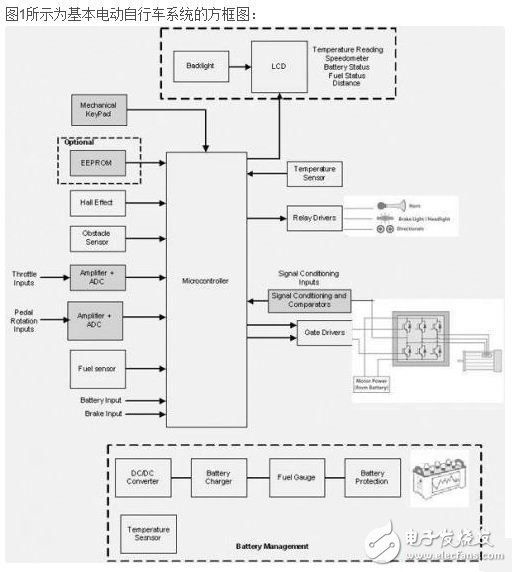
目前的電動自行車系統(tǒng)采用16位和32位微控制器。微控制器控制和管理車輛的所有功能和特性。一旦用戶打開點火開關(guān)發(fā)動電動自行車,微控制器就能獲得輸入,從而啟動三相無刷車用電機。微控制器可接收來自用戶的各種車輛輸入信號,并對車輛進(jìn)行相應(yīng)的操控。微控制器按照用戶所選擇的速度驅(qū)動三相無刷車用電機,電機的速度可根據(jù)用戶的加速和制動傳感器輸入進(jìn)行變化和控制。
微控制器采用內(nèi)部或外部串行EEPROM(I2C/SPI型)來存儲距離讀數(shù)等數(shù)據(jù)。此外,微控制器還采用實時時鐘(RTC)在顯示屏上顯示準(zhǔn)確的時間。
溫度測量由板上RTD或熱敏電阻型溫度感應(yīng)器件來實現(xiàn)。電動自行車系統(tǒng)還能利用障礙傳感器在泊車時獲取附近車輛的信息。燃料傳感器獲取引擎中的燃料信息,微控制器也可監(jiān)控電池輸入并將其在LCD顯示屏上顯示。繼電器驅(qū)動電路則用于切換剎車燈、車頭燈和轉(zhuǎn)向燈的開/關(guān)等。
供電部分由作為電源的可再充電鉛酸或鋰離子電池組成,且必須滿足電池充電器的規(guī)定。電池輸入向下轉(zhuǎn)換為DC電壓,以便為微控制器和其它電路提供動力。點火開關(guān)則可啟用或禁用板上穩(wěn)壓器。此外,供電部分還可提供電池、過流、過熱及啟動故障狀態(tài)保護(hù)電路等多種保護(hù)功能。OEM廠商也會對手機等外部設(shè)備的充電做出相應(yīng)規(guī)定。
電動自行車系統(tǒng)的實現(xiàn)
為給出電動自行車系統(tǒng)的實際實現(xiàn)方案,本文介紹了一款基于賽普拉斯PSoC 4的設(shè)計。PSoC 4器件完美集成了帶數(shù)字可編程邏輯的微控制器、高性能模數(shù)轉(zhuǎn)換、帶比較器模式的運算放大器以及標(biāo)準(zhǔn)的通信和時序外設(shè)等。微控制器為32位的ARM Cortex M0,工作頻率高達(dá)48 MHz,并可提供最大32 KB的閃存和最大4 KB的SRAM以及2 KB的內(nèi)部EEPROM.
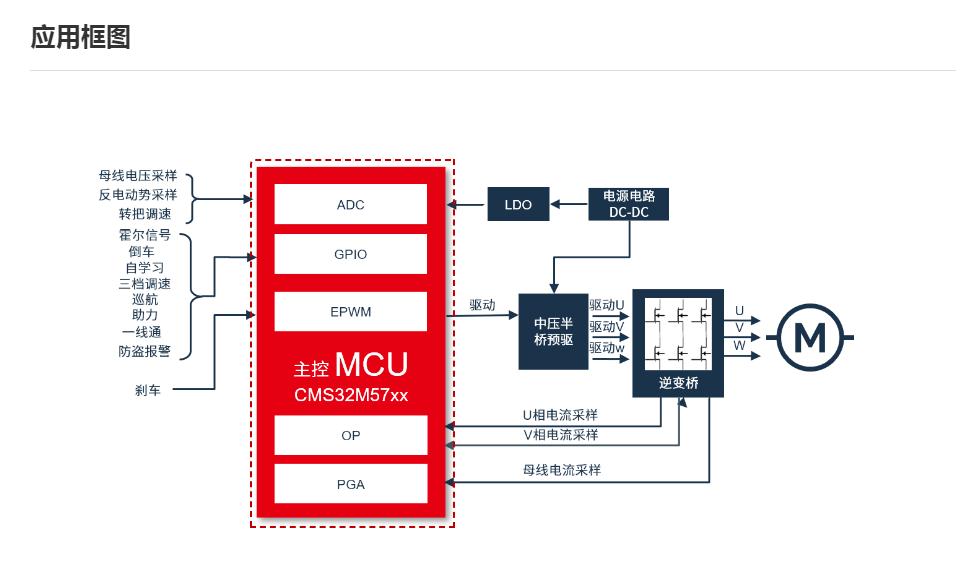
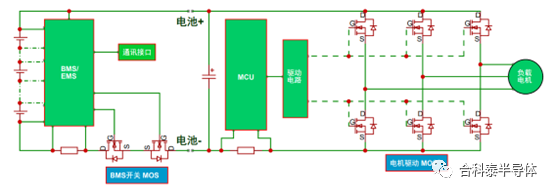
該實現(xiàn)方案采用板上6個P型通道(P-Channel)MOSFET和門驅(qū)動器電路來驅(qū)動三相無刷電機。PSoC 4器件帶有內(nèi)置PWM、時鐘、多路轉(zhuǎn)換器和比較器,可用來驅(qū)動和控制三相無刷電機。此外,內(nèi)置的16位PWM將用于驅(qū)動控制電機的FET門驅(qū)動器電路。而 PWM的占空比根據(jù)用戶設(shè)置所需的速度而各不相同。
PSoC4帶有內(nèi)部運算放大器、PGA、比較器和12位1MSPS SAR ADC,可提供差動和單端模式,包括采樣保持(S/H)功能。ADC可通過改變PWM占空比來控制電機速度,并測量不同的傳感器輸入以滿足電池監(jiān)控、低成本溫度感應(yīng)、障礙感應(yīng)和燃料感應(yīng)等需求。這樣系統(tǒng)就無需采用任何外部放大器、ADC或比較器。
利用兩個電流DAC(IDAC),該系統(tǒng)可具備通用感應(yīng)功能,且能夠利用任何引腳上的電容式感應(yīng)技術(shù)。PSoC 4架構(gòu)支持電容式感應(yīng)組件,該組件同時支持手動和自動調(diào)校。采用電容式界面可幫助整個電動自行車系統(tǒng)實現(xiàn)防水性,同時也能直接驅(qū)動繼電器,從而充分滿足喇叭、剎車燈、車頭燈、轉(zhuǎn)向燈和LCD顯示屏等需求。該器件的工作電壓范圍介于1.71V到5.5V之間,能與其它外部外設(shè)輕松連接,從而實現(xiàn)更多功能。此外,PSoC 4還支持兩個獨立的在運行中可重配置串行通信模塊(SCB),此模塊帶可重配置的I2C、SPI或UART功能,可用于內(nèi)外部外設(shè)通信。
該實現(xiàn)方案采用可再充電的鉛酸或鋰離子電池作為電源。輸入電壓通過板上降壓穩(wěn)壓器進(jìn)行下變頻轉(zhuǎn)換。1.71 V的較低工作電壓和超低功耗運行,再加上冬眠和深度休眠模式,可支持喚醒時間和功耗折中方案,從而實現(xiàn)更長的電池使用壽命。
采用PSoC Creator IDE工具,我們能通過隨時可用的組件模塊設(shè)計出所有的接口和邏輯,包括面向模擬傳感器和其它輸入的SARADC和PGA;面向電機驅(qū)動應(yīng)用的PWM、 CLK、MUX和比較器等組件;面向直接驅(qū)動字符和段式LCD的組件;面向電動自行車應(yīng)用中CAN協(xié)議接口的CAN組件;以及通過內(nèi)部系統(tǒng)時鐘進(jìn)行實時測量、從而讓系統(tǒng)不再需要外部時鐘/振蕩器電路的RTC組件等。
此外,PSoC Creator還支持工程師訪問包括集成編譯器工具鏈、RTOSes和量產(chǎn)編程器在內(nèi)的完整的工具生態(tài)系統(tǒng)。有了PSoC Creator,開發(fā)人員就可利用分層原理圖設(shè)計創(chuàng)建并共享用戶自定義的定制外設(shè)。然后,他們能對所選定的組件實現(xiàn)自動布局布線,并集成簡單的粘接邏輯 (通常位于分立多路轉(zhuǎn)換器中)。
過流保護(hù)用于關(guān)閉電機驅(qū)動PWM,因而可停止電機運行。PSoC 4器件采用基于比較器的PWM Kill信號觸發(fā),可在檢測到過流情況時終止電機驅(qū)動。該模塊的輸入來自總線電流,其截止參考可設(shè)為電機消耗的最大電流。總線電流輸入饋送到比較器和可配置的截止參考,并由DAC進(jìn)行設(shè)置。如果總線電流低于參考閾值,那么比較器輸出設(shè)為高。比較器輸出連接到PWM的“KILL”信號輸入。當(dāng)“KILL”輸入為高時,PWM輸出關(guān)閉,從而可避免電機受損。該完整模塊的實現(xiàn)方案將采用PSoC creator組件,且無需設(shè)計人員編寫的任何固件。
無傳感器的電機控制
無傳感器的電機控制不需要霍爾傳感器,而是采用反電動勢(back-EMF)過零檢測技術(shù)來控制電機的運動。當(dāng)電機旋轉(zhuǎn)時,每個繞組生成的電壓稱為與繞組供電主電壓相反的反電動勢電壓。反電動勢的極性與繞組激勵所用電壓的方向相反,并與電機的轉(zhuǎn)速成正比。
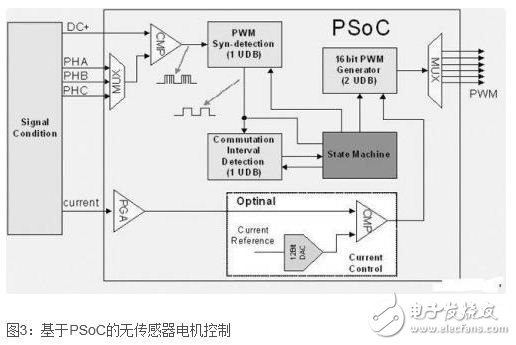
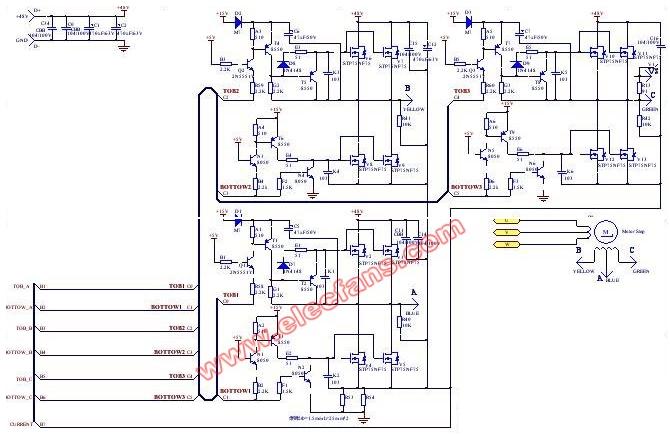
在圖3中,三相反電動勢信號終止而DC總線擴(kuò)展并路由到PSoC.PSoC將采用多路復(fù)用器切換到比較器的終止輸入,并將其與DC總線電壓進(jìn)行比較。級聯(lián)的數(shù)字邏輯將過濾出PWM信號,以獲得真正的過零信號。微控制器將根據(jù)該信息決定換向。
可選的電流控制將被應(yīng)用于PWM輸出控制,從而對電機電流進(jìn)行調(diào)節(jié)。此內(nèi)環(huán)以比較器為基礎(chǔ):反饋總線電流與12位DAC提供的參考電流值進(jìn)行比較。改變DAC輸出將修改輸出電流值。
基于傳感器的(霍爾效應(yīng))電機控制
基于傳感器的無刷電機控制采用霍爾傳感器輸入來檢測轉(zhuǎn)子位置,進(jìn)而控制電機的運動。它為微控制器提供霍爾傳感器輸入,并作為閉環(huán)系統(tǒng)工作,這有助于實現(xiàn)較長驅(qū)動的自動速度鎖定。
設(shè)計挑戰(zhàn)
高性能智能微控制器需要更高M(jìn)IPS性能的CPU內(nèi)核、更快速的ADC(》= 500Ksps 10位)、內(nèi)置閃存和SRAM存儲器、內(nèi)置EEPROM、模擬和數(shù)字外設(shè)來執(zhí)行高性能模擬測量、CAN接口、三相電機控制、LCD驅(qū)動、低功耗運行、 RTC、不同外部協(xié)議接口等關(guān)鍵功能。
該系統(tǒng)可采用低成本前面板設(shè)計,實現(xiàn)按鍵和LED/LCD界面等不同特性。此外,電容式感應(yīng)技術(shù)可用于在前面板上實現(xiàn)按鍵、滑條和接近傳感器。在前面板上利用鄰近的LED(PWM型)滿足電容式感應(yīng)性能要求(如信噪比等),這對于系統(tǒng)設(shè)計人員來說可能是一大設(shè)計挑戰(zhàn)。
選擇具有低Ron和低柵電容的Power MOSFET正是驅(qū)動三相電機所必需的。采用高功率MOSFET驅(qū)動電路設(shè)計電路板以及處理電池輸入的較高板上電流是電路板設(shè)計人員面臨的另一大挑戰(zhàn)。由于該系統(tǒng)涉及機電構(gòu)造問題,要設(shè)計出一款低成本的緊湊型機電系統(tǒng)極具挑戰(zhàn),而且還要讓最終設(shè)計通過認(rèn)證。此外,電動自行車系統(tǒng)在設(shè)計時需要考慮一次充電能行駛更長里程的問題。
支持恢復(fù)機制的故障檢測是所有汽車應(yīng)用都不可或缺的。而且,具有電池保護(hù)、過流、過熱和啟動故障狀態(tài)保護(hù)功能的電源設(shè)計也是一大必要條件。
此外,開發(fā)人員可能還希望采用一次性可編程(OTP)的器件來防止競爭對手和黑客對固件實施逆向工程。
系統(tǒng)局限性
PSoC 4支持電容式感應(yīng)技術(shù),可通過觸摸操控的鍵盤取代機械按鍵。這不僅可減少由機械按鍵造成的故障幾率,同時還可提高產(chǎn)品的可靠性。PSoC Creator支持CapSense SmartSense組件,該組件能自動調(diào)校電容式感應(yīng)按鍵和滑條的敏感度,從而使開發(fā)人員無需再進(jìn)行手動調(diào)校。此外,電容式感應(yīng)還能提高最終系統(tǒng)的防水性。
在前面板上實現(xiàn)的觸摸屏設(shè)計取代了LCD顯示屏和鍵盤,這可為用戶提供更好的用戶界面和更高的靈活性。系統(tǒng)還可添加連接iPod/iPhone等外部設(shè)備的接口,通過UART或USB接口實現(xiàn)與媒體播放器的通信,從而支持播放音樂、控制播放列表和設(shè)備充電等功能。
故障分析和返回材料:電路板上內(nèi)外部接口數(shù)量的增加必然會讓入侵者獲得更多途徑來對系統(tǒng)實施破壞。這也是嵌入式系統(tǒng)面臨的一個最大局限性問題。
在汽車應(yīng)用領(lǐng)域中所使用的電動自行車系統(tǒng)目前是采用微控制器來實現(xiàn)。PSoC完美結(jié)合了微控制器和ASIC.采用基于PSoC的電動自行車解決方案,可幫助我們降低汽車產(chǎn)業(yè)的整體產(chǎn)品成本(通過減少BOM成本)和項目開發(fā)成本(采用PSoC Creator來實現(xiàn))。














 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論