 電子發燒友App
電子發燒友App


0 引言
本文介紹一種基于C2051 的全數字變頻控制器,它可以根據外界環境的變化(如壓力、溫度、輸入電壓和人為地設定等),自適應地改變輸出電源頻率,達到自適應對電機調速的目的。在控制算法中,采用模糊理論,設定隸屬函數,求出控制輸入的隸屬度,并進行模糊規則判斷,得出模糊的控制輸出。然后進行模糊量的計算,得出精確的控制輸出,達到控制運行頻率的目的。經過試運行表明,自適應能力強,電路簡單,特別適合于低壓帶負荷啟動困難的邊遠地區用戶。
1 變頻控制器系統結構原理
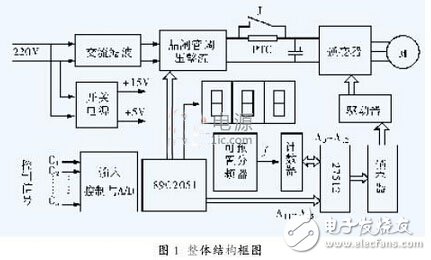
下面,以1.5 kW輸出功率的變頻控制器為例進行介紹,該系統結構如圖1所示。逆變器采用三菱IPM模塊PM20CTM060,本身具有控制電源欠壓鎖定、過熱保護、過流保護、短路保護,一旦保護動作,送出一個故障信號(F0)。運算控制單元采用ATMEL 公司的89C2051 高性能價格比單片機 [1],該單片機采用80C31內核指令系統,內含2KB Flash

用戶存儲器,編程較為方便。AT89C2051引腳如圖2所示。
該系統的工作原理如下:外部模擬量(溫度、電壓、界面設定等)經A/D轉換后送入89C2051,經運算處理后,求得運行頻率,然后轉換成預置分頻器的倍數,控制尋址計數器IC4 輸入脈沖的頻率fc,從而控制27512已存波形數據的輸出速度,達到變頻的目的。27512的低11位地址(A0耀A10)由計數器尋址,控制具有一定調制度M 的SPWM 波形輸出。高5 位地址(A11 耀A15)由89C2051直接尋址。控制具有不同M的SPWM波形。
因此可選擇32種不同調制度的波形。系統的工作狀態及環境參數均可由顯示單元分類顯示。整個顯示部分由89C2051的RXD、TXD控制。
由于PM20CTM060 功率模塊內含驅動單元,故只須光耦隔離,就可以用數字電路進行驅動。
2 控制器電路設計
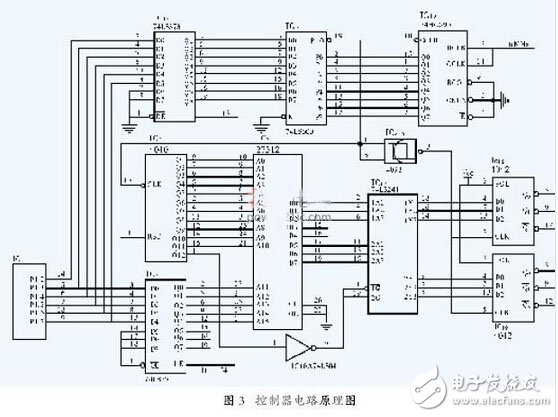
如圖3所示,其中SPWM波形存于27512中。圖中211個8 位字節存儲一個具有固定調制度的SP原WM波形。由于SPWM 的對稱性,211位只存一個周期的1/2,具體分配方法是每個字節的0、1、2 三位存放三相SPWM 的0耀仔中的數值。3、4、5 三位存放仔耀2仔中的數值。對應的尋址方法是IC4由0開始計數,IC17相應的1Y1、1Y2、1Y3輸出0耀仔波形。當211
位計滿后,半個周期輸出完畢,再計一次數時,IC4的Q12輸出為1,經反向器驅動IC17的2Y1,2Y2,2Y3輸出。這時,存于27512各字節中檔的第3,4,5位的數據開始輸出,從而產生SPWM的后半周期。這樣反復循環,就可輸出一個具有固定頻率、固定調制度的波形。一個完整的SPWM波形共由4 096個脈沖組成。
變頻的原理是改變IC14的分頻基數fb。就可改變計數脈沖頻率,從而改變讀完4 096 個脈沖的時間,達到了變頻的目的,其關系是
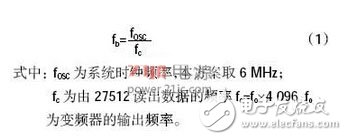
顯然,變頻器的輸出頻率越高的值越大,而分頻系數越小。例如,當需要輸出fo=50 Hz交流電時,則先求得
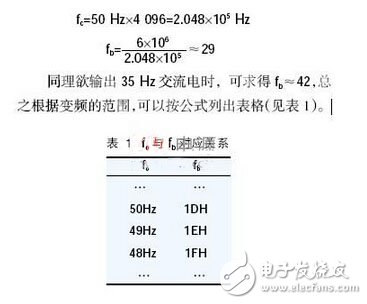
為了提高系統的分辨率,可提高系統的振蕩頻率,一般可使fo的頻率分辨率達到0.5 Hz以下。
調制度M的控制方法是:將27512 共分成25共32個區域,每個區域包含211個字節,存儲一個具有一定調制度的全周期SPWM波形。存儲區一共存儲32個不同M 的SPWM波,并將其按M的大小排列,由IC1的P1.3耀P1.7尋址,輸出頻率及調制度的選擇由控制算法決定。
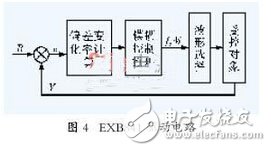
控制算法原理如圖4所示[2],控制量R 和反饋量Y 之差e,以及誤差變化率一同輸入到模糊控制器進行推理,并對狀態的走勢進行預測,從而選擇恰當的f 及M,通過計算機尋址及分頻,輸出一組合適的波形進入下一狀態的運行。由于IC1內的Flash存儲區只有2 kB,推理方法主要采用相關法,參數子集和其變化率子集分別選用4 維和3維,完全滿足一般家電及工業控制的需要。
3 波形存儲的幾點考慮
3.1 載波頻率的確定
設定最高輸出交流頻率為60 Hz,可求得輸出周期TO=16.67 ms,則存儲器中每單元的分辨率為駐T=16.67/4 096=4.096 滋s,也就是說,每個存儲單元所代表的脈寬為4 滋s。
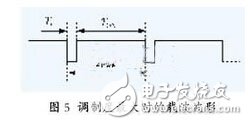
設定載波頻率fPWM=20 kHz,TPWM=1/20 000=50 滋s,則當調制度最大時存儲的載波波形如圖5所示。圖5中TPWM =50 滋s,所占的存儲單元數為N=TPWM / 駐T=12,同樣可求得Td占一個存儲單元,TON占11 個存儲單元。
3.2 存儲波形的形成
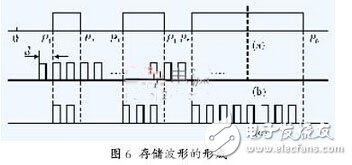
以fo=50 Hz為例,見圖6。由于載波脈沖周期TPWM =50 滋s,而20 ms對應360°,所以每個載波周期對應的角度為琢PWM=360°×50 滋s/20 ms=0.9°。
而對于消除3、5、7、9、11 次5 個諧波的最佳波形的P1 耀P5點位置經計算為[3]:18.167毅、26.633毅、36.867毅、52.9毅、56.683毅,顯然不是園.9毅的整數倍。因此,量化誤
差將影響Pi 位置的精確度,使整個系統對諧波的消除不能達到最佳。試驗證明,這種影響可以忽略。
3.3 輸出交流電源的控制
根據U/f =常數,當頻率變低時,相應輸出電壓須下降。因此,在35耀60 Hz范圍內,設置了32 種針對不同電壓的波形,并用計算機的P1.3耀P1.7直接尋址。另外,考慮到負載的變化和頻率的變化而影響輸出電壓的波動,軟件設置上允許同一頻率下可根據需要選擇不同M 的波形,從而使電壓在一定范圍內可以調整,用來對轉矩進行補償,這些工作都由模糊推理來完成。
4 結語
該變頻控制系統配用三菱IPM模塊PM20CHA060構成1.5 kW 微型全數字三相變頻控制器,并對油泵電機進行拖載實驗,滿足應用要求。
1)該系統由于變頻構思巧妙,并利用IPM 功率塊,使電路結構緊湊,控制簡單,適應性寬,易于批量生產,可用于家庭、工業控制。
2)由于配有LED 顯示器(4 位)可對環境條件、設置條件、運行情況分類進行顯示。
3)為了進一步提高控制精度,簡化硬件電路,可將C2051改換為富士通公司的MB89130A(48腳)8位單片機[4]。由于該片內部ROM為32 KB,4 通道8位A/D 轉換,5 個內部中斷和3 個外部中斷,從而增加變量空間,可降低成本,提高可靠性。








 工商網監
工商網監
評論