 電子發燒友App
電子發燒友App


1、引言
近年來,隨著嵌入式技術的不斷發展,各種電子產品層出不窮,對于那些具有眾多功能,但按鍵數目無法滿足要求的設備來說,選擇一個好的操作系統和設計一套合理的消息處理機制,已經成為研發人員研究的一個課題。本文以此為背景,研究了UCOS-II操作系統在數碼相框中的應用,詳細描述了UCOS-II操作系統在ZEVIO1020雙核處理器上的移植,并且根據數碼相框多任務的特點,設計了一套完整的消息處理機制。實踐證明,采取本文所設計的系統可以靈活的完成任務間的調度和切換。
?
2、系統概述
數碼相框的主要特色是圖片顯示清晰,圖片顯示效果多種多樣,同時還具有視頻播放、音頻播放、JPEG圖片解碼等附加功能。在本系統實現過程中主要分為六個模塊:總控模塊、GUI界面模塊、圖片顯示模塊、視頻模塊、音頻模塊、JPEG解碼模塊。總控模塊實現對其它模塊的管理與控制。圖片顯示模塊通過ZEVIO1020雙核處理器的3D圖像內核處理,實現多種三維的動態顯示效果,通過對定時器設置的改變,實現圖片播放速率的調整。視頻模塊和JPEG解碼模塊因為對速度的要求較高,使用高速數據傳輸通道DMA來實現ARM和DSP之間的雙核解碼。音頻模塊可以解碼MP3,WMA等多種音頻格式。UCOS-II操作系統的任務就是在不同狀態下,根據不同的鍵盤輸入消息實現各個模塊間的靈活調度。
?
3、基于ZEVIO1020的系統硬件平臺
ZEVIO1020多媒體應用處理器是美國LSILogic公司發布的第一款基于ZEVIO架構的標準芯片。具備低功耗、更高級圖像和數字音/視頻處理功能。ZEVIO1020處理器高度集成,包括通用處理的ARM9內核,多媒體處理的ZSP400內核,此外還包括了一個3D圖像內核和一個2D/3DMIDI聲音核,它也集成了一個視頻DAC(數字到模擬轉換器)用于直接輸出到電視和一個SDIO(安全數字輸入/輸出)卡槽用于數據存儲或者額外的周邊擴展。
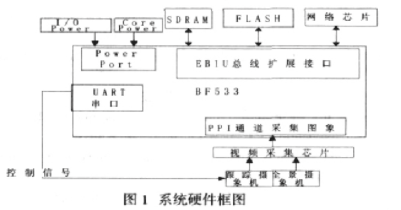
ZEVIO1020處理器的開發平臺如圖1所示,它的通用處理內核ARM926EJ-S的工作主頻為150MHz,作為系統主處理器,可以完成控制和數據處理工作;ZSP400DSP處理器為視頻解碼和JPEG解碼工作提供了高效運行平臺,工作主頻為150MHz。除此之外,ZSP400具有雙MAC、雙算法邏輯單元(ALU)DSP核,每周期4指令,正交的載入/存儲指令集的特點。同時在ZEVIO1020的存儲結構中,DMA提供了高速數據轉移,能夠完成ARM處理器和DSP處理器雙核之間的高速數據傳輸。
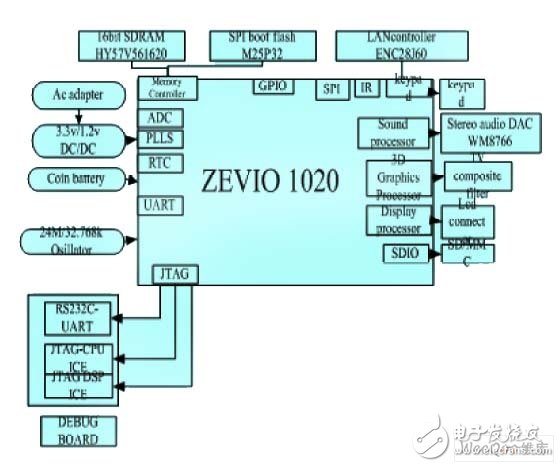
圖1 ZEVIO1020平臺體系架構
?
4、UCOS-II在ZEVIO1020上的移植
UCOS-II操作系統是完全可剝奪型的實時內核,可以同時管理64個任務,函數的調用和服務時間具有確定性。其內核提供的任務調度與管理,時間管理,任務間同步與通信,內存管理和中斷服務等功能,具有執行效率高、占用空間小、實時性能優良和可擴展性強等特點。最小內核編譯可以達到2KB。UCOS-II的移植主要是編寫和處理器有關的代碼,以及根據處理器設置中斷向量表,提供給操作系統一個時鐘作為系統時鐘。
OS_CPU_A.ASM是需要用戶根據不同處理器的體系結構編寫的匯編文件。該文件包括了四個函數:
OSStartHighRdy()、OSStartHighRdy()、OSCtxSw()、OSIntCtxSw()、OSTickISR()。
OSStartHighRdy()的作用是運行就緒態任務優先級最高的任務。OSCtxSw()是實現CPU在正常運行時任務間的切換,即對當前任務堆棧的保存和對高優先級任務堆棧的彈出,使最高優先級任務獲取CPU的控制權。OSIntCtxSw()是在中斷服務程序中執行切換功能的函數。
OSTickISR()是系統時鐘的中斷服務程序。該程序執行的頻率為100HZ,主要功能是檢查是否有由于延時而被掛起的任務成為就緒任務,如果有就調用OSIntCtxSw()進行任務切換,從而運行高優先級的任務。OS_CPU.C中主要編寫任務堆棧初始化函數OSTaskStkInit()。
中斷向量表是系統產生中斷處理的索引表,系統會根據不同的中斷類型引導它們進入不同的中斷處理函數。ZEVIO1020雙核處理器提供了多種不同類型的中斷處理,主要分為兩類:IRQ中斷和FIQ中斷。FIQ中斷是快速中斷處理函數,執行速度快,優先級高,一般用于重要和對實時性要求較高的中斷處理。IRQ中斷是普通的中斷處理函數,一般的中斷處理都歸屬于這種類型的中斷。在各種中斷同時觸發的情況下,中斷程序會根據各種中斷優先級的設定來進行比較,執行優先級最高的中斷處理程序。對于UCOS-II的操作系統來說,需要一個系統時鐘作為操作系統的時鐘節拍,供操作系統調用時間函數使用。ZEVIO1020有4個Timer可供選擇,在這里選用Timer1作為系統時鐘,設置系統時鐘頻率為100HZ且為FIQ中斷。中斷處理程序的實現過程如圖2所示。
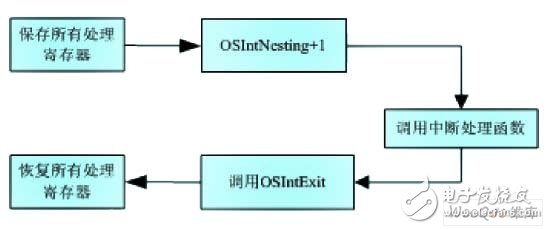
圖2中斷處理流程圖
?
5、軟件層的設計與實現
5.1、系統任務層的組成和優先級的設計
系統任務層并行存在以下六個任務:總控任務、音頻解碼任務、視頻解碼任務、JPEG圖片解碼任務、GUI界面任務,圖片顯示任務。每個任務均有以下三部分組成:應用程序、任務的堆棧以及任務的狀態機。任務堆棧用以存儲CPU寄存器內容。當某任務由運行態變為其他狀態時,CPU寄存器內容壓入相應任務堆棧,反之則將相應任務堆棧內容置入CPU寄存器。任務的狀態機記錄了當前任務的運行狀態,當有新的消息轉發給任務時,任務可根據狀態機查詢相應的狀態,來決定下一步的具體操作。操作系統也可以查詢任務的狀態機來獲得當前任務的運行狀態。
優先級的設定是根據任務的重要性和任務的實時性需求來定的。總控任務優先級最高,視頻任務的實時性大于音頻任務的實時性,所以將音頻的優先級排在視頻解碼任務的后面。對于其他幾個任務一般沒有太多的約束,我們可以任意安排其優先級。優先級從高到底的順序排列:總控任務,視頻解碼任務,音頻解碼任務,JPEG解碼任務,圖片顯示任務,GUI界面任務。
5.2、系統任務間的消息通信機制與狀態機的設計
在數碼相框這個系統中,消息的類型主要有兩類:
一是外部輸入(鍵盤)轉化的消息;二是任務之間相互傳遞的消息。第一類消息不知道消息的接受方,直接交給總控任務來處理,總控任務通過查詢狀態機獲得各個任務目前的運行情況后,進行內部消息的轉換,轉發給目標任務,由目標任務來具體處理。目標任務接受到總控任務傳送過來的內部消息之后,查詢自身的狀態機,執行相應的處理。每個任務都有一個時間點來查詢新的消息。在音頻解碼任務中這個時間點設在解碼數據流后填充buffer和播放buffer互換的時刻。圖片顯示任務是一個不斷循環的顯示過程,利用每次循環結束的時刻查詢新的消息。第二類消息是任務之間相互傳遞的消息,任務知道消息的接受方。因此在兩個需要相互通信的任務之間直接建立消息郵箱和信號量進行同步和通信。
狀態機是記錄任務運行狀態的一種工具,對于數碼相框這個系統來說,在不同的運行狀況下對于相同按鍵的處理是不同的,所以必須通過狀態機來實現任務的調度和處理。本文的狀態機實現采取分塊的思想,即一級一級從上往下對消息進行處理。上級的狀態機不需要對消息的內容進行具體的處理,只要明確傳遞給下面的哪一個狀態機來具體處理。針對數碼相框這個產品,本文設計了兩級狀態機的實現機制。一級是總控任務的狀態機,二級是各個應用程序的狀態機。總控任務的狀態機,主要用來對外部消息的轉發;應用程序的狀態機主要處理啟動,退出,暫停等具體操作。如圖3所示,總控任務查詢到有新的消息進來后,首先查詢當前各個任務的運行情況,然后判別消息的內容,將消息轉換成內部消息分發給當前任務或者即將運行的任務。應用程序的任務狀態機接受到總控狀態機發送過來的內部消息之后,也是查詢自身的狀態機,并且檢查消息的正確性,然后根據自身的運行狀態執行相應的操作。具體如圖4所示。
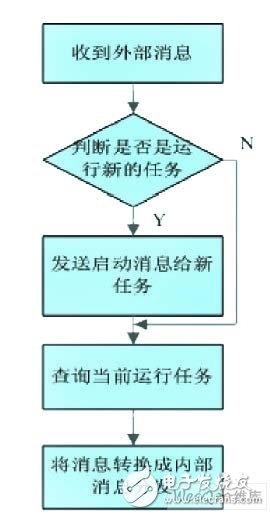
圖3總控任務的狀態機流程
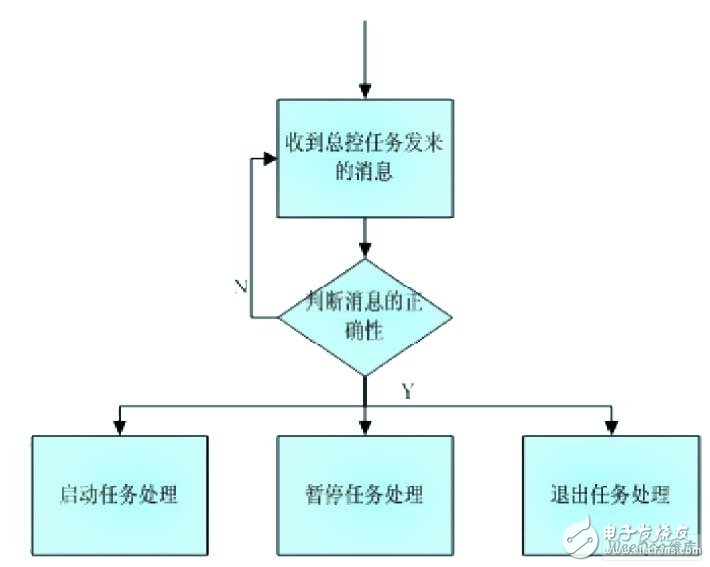
圖4 應用程序的狀態機流程圖
5.3、數碼相框系統的整體實現過程
系統上電后從flash中執行boot.s啟動代碼,boot.s的主要作用就是初始化SDRAM,設置PLL,將保存在flash中的CODE拷貝到SDRAM中。因為flash中的數據可以永久保存,不會因為掉電而消失,而SDRAM則不行。
在主函數main中初始化UCOS-II操作系統,創建總控任務、視頻解碼任務、音頻解碼任務、圖片顯示任務、GUI界面任務,同時創建信號量和mailbox等系統資源等待應用程序調用,啟動UCOS-II操作系統。此后CPU的控制權交給操作系統,操作系統將CPU的控制權首先給予優先級最高的總控任務。
總控任務運行后,驅動所有外接設備,包括LCD驅動、SPU驅動、GUI驅動、Timer驅動、雙核的驅動,開啟必要的中斷位,隨后總控任務開始輪詢外部消息,有消息進來時根據上述描述的狀態機,傳遞給其他任務,運行其他任務,同時保證每隔5個時鐘節拍重新輪詢一次消息隊列,處理新的外部消息,沒有新的消息立即釋放CPU的控制權,返回正在運行的任務。
?
6 結束語
本文討論了UCOS-II操作系統在ZEVIO1020上的移植過程,闡述了移植過程中的幾個主要步驟,同時針對數碼相框這個電子消費產品給出了整個系統任務的設計方法以及如何進行任務間的消息傳遞方案。解決了系統中多任務之間相互切換和多任務同時運行的困窘。充分挖掘了UCOS-II操作系統的特性,靈活運用了操作系統的資源并且予以實現。實驗測試結果顯示,各種任務模塊可以在預想的方案中實現靈活的調度。
圖5 基于UCOS-II操作系統的數碼相框實物圖










 工商網監
工商網監
評論