 電子發(fā)燒友App
電子發(fā)燒友App


明確一點對比AD的構(gòu)造,stm32有3個AD,每個AD有很多通道,使用哪個通道就配置成哪個通道,這里定時器也如此,有很多定時器TIMx,每個定時器有很多CHx(通道),可以配置為輸入捕捉-------測量頻率用,也可以配置為輸出比較--------輸出PWM使用
輸入捕捉:可以用來捕獲外部事件,并為其賦予時間標(biāo)記以說明此事件的發(fā)生時刻。
外部事件發(fā)生的觸發(fā)信號由單片機中對應(yīng)的引腳輸入(具體可以參考單片機的datasheet),也可以通過模擬比較器單元來實現(xiàn)。
時間標(biāo)記可用來計算頻率,占空比及信號的其他特征,以及為事件創(chuàng)建日志,主要是用來測量外部信號的頻率。
輸出比較:定時器中計數(shù)寄存器在初始化完后會自動的計數(shù)。從bottom計數(shù)到top。并且有不同的工作模式。
另外還有個比較寄存器。一旦計數(shù)寄存器在從bottom到top計數(shù)過程中與比較寄存器匹配則會產(chǎn)生比較中斷(比較中斷使能的情況下)。
然后根據(jù)不同的工作模式計數(shù)寄存器將清零或者計數(shù)到top值。
1、朋友,可以解釋一下輸入捕獲的工作原理不?
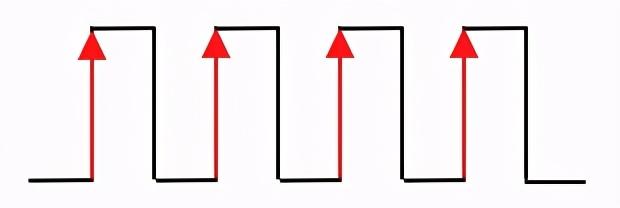
很簡單,當(dāng)你設(shè)置的捕獲開始的時候,cpu會將計數(shù)寄存器的值復(fù)制到捕獲比較寄存器中并開始計數(shù),當(dāng)再次捕捉到電平變化時,這是計數(shù)寄存器中的值減去剛才復(fù)制的值就是這段電平的持續(xù)時間,你可以設(shè)置上升沿捕獲、下降沿捕獲、或者上升沿下降沿都捕獲。它沒多大用處,最常用來測頻率。
計數(shù)寄存器的初值,是自己寫進去的嗎?
是的,不過默認不要寫入
我如果捕獲上升沿,兩個值相減,代表的時兩個上升沿中間那段電平的時間。對不?
是的
timer1有五個通道(對應(yīng)五個IO引腳),在同一時刻,只能捕獲一個引腳的值,對不?
那是肯定的,通道很像ADC通道,是可以進行切換的。
那輸出比較的原理你可以幫我介紹一下不?
這里有兩個單元:一個計數(shù)器單元和一個比較單元,比較單元就是個雙緩沖寄存器,比較單元的值是可以根據(jù)不同的模式設(shè)置的,與此同時,計數(shù)器在不停的計數(shù),并不停的與比較寄存器中的值進行比較,當(dāng)計數(shù)器的值與比較寄存器的值相等的時候一個比較匹配就發(fā)生了,根據(jù)自己的設(shè)置,匹配了是io電平取反、變低、還是變高,就會產(chǎn)生不同的波形了。
比較單元的值是人為設(shè)進去的吧?
是的,但是他要根據(jù)你的控制寄存器的配置,來初始化你的比較匹配寄存器。
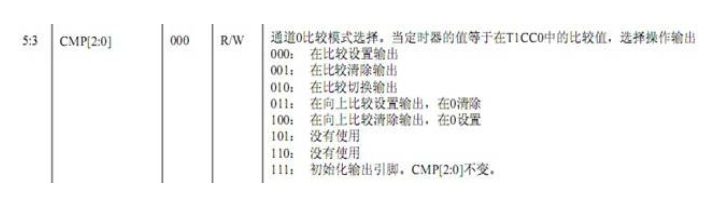
上面這個總看不懂,好像不不止你說的那幾種情況:“匹配了是io電平取反、變低、還是變高,就會產(chǎn)生不同的波形了”
就是比較匹配了你要IO電平怎么辦?是清0還是置1?還是怎么樣?這樣才能產(chǎn)生波形啊 要不然你要比較單元有什么用呢?
設(shè)置輸出就是置1,清除輸出就是置0,切換輸出就是將原來的電平取反,對不?
是的 你理解的很快
011:計數(shù)器向上計數(shù)達到最大值時將引腳置1,達到0時,引腳電平置0,,對不?
恩
定時器1的輸出比較模式怎么用。利用這個功能輸出一個1KHZ,占空比為10%的程序怎么寫啊?求高人指點
1、陪定時器1的功能為特殊功能,不是普通IO 在PERCFG這里
2、P1SEL引腳選擇
3、P1DIR設(shè)為輸出
4、T3CC0設(shè)置周期
5、T3CC1設(shè)置占空比
6、T3CCTL0 設(shè)置通道0
7、T3CCTL1 設(shè)置通道1
8、T3CTL設(shè)為模模式
9、用T3CTL打開即可
************以下是用定時器做頻率源,用定時器測量該頻率的應(yīng)用程序!!!***********
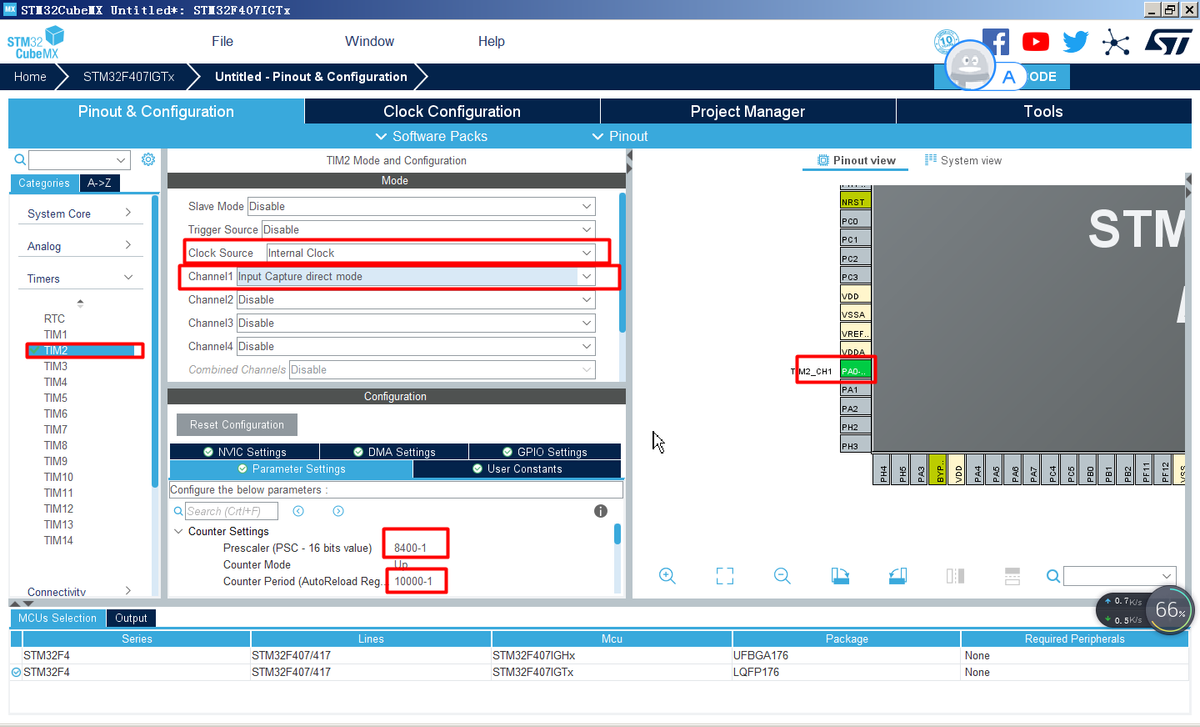
調(diào)試STM32的定時器好幾天了,也算是對STM32的定時器有了點清楚的認識了。我需要測量4路信號的頻率然后通過DMA將信號的頻率傳輸?shù)酱鎯ζ鲄^(qū)域,手冊說的很明白每個定時器有4個獨立通道。然后我就想能不能將這4路信號都連接到一個定時器的4個通道上去。理論上應(yīng)該是行的通的。剛開始俺使用的是TIM2的123通道,TIM4的2通道來進行頻率的測量。由于沒有頻率發(fā)生器,所以我用tim3作為信號源,用TIM2,TIM4來進行測量就ok了(剛好4個通道了)。
請看一開始的程序,以TIM2的1,3通道為例子(2通道設(shè)置方法一樣):
TIM_ICInitStructure.TIM_ICMode =TIM_ICMode_ICAP; //配置為輸入捕獲模式
TIM_ICInitStructure.TIM_Channel =TIM_Channel_1; //選擇通道1
TIM_ICInitStructure.TIM_ICPolarity =TIM_ICPolarity_Rising; //輸入上升沿捕獲
TIM_ICInitStructure.TIM_ICSelection =TIM_ICSelection_DirectTI; //通道方向選擇
TIM_ICInitStructure.TIM_ICPrescaler =TIM_ICPSC_DIV1; //每次檢測到捕獲輸入就觸發(fā)一次捕獲
TIM_ICInitStructure.TIM_ICFilter =0x0; //濾波
TIM_ICInit(TIM2, &TIM_ICInitStructure); //TIM2通道1配置完畢
TIM_ICInitStructure.TIM_ICMode = TIM_ICMode_ICAP; //配置為輸入捕獲模式
TIM_ICInitStructure.TIM_Channel =TIM_Channel_3; //選擇通道3
TIM_ICInitStructure.TIM_ICPolarity =TIM_ICPolarity_Rising; //輸入上升沿捕獲
TIM_ICInitStructure.TIM_ICSelection =TIM_ICSelection_DirectTI; //
TIM_ICInitStructure.TIM_ICPrescaler =TIM_ICPSC_DIV1; //每次檢測到捕獲輸入就觸發(fā)一次捕獲
TIM_ICInitStructure.TIM_ICFilter = 0x0; //濾波
TIM_ICInit(TIM2, &TIM_ICInitStructure); //TIM2通道3配置完畢
以上是輸入捕獲配置
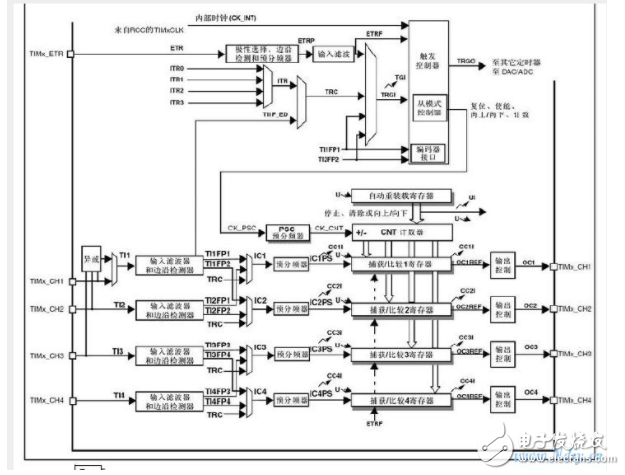
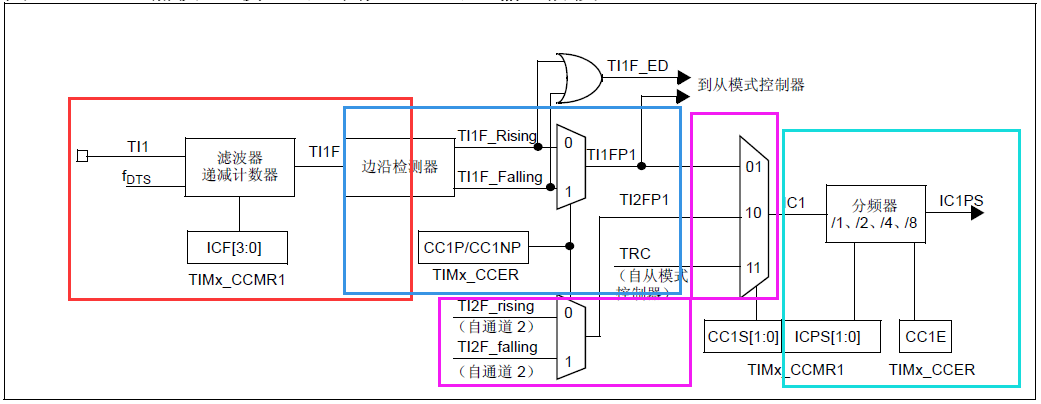
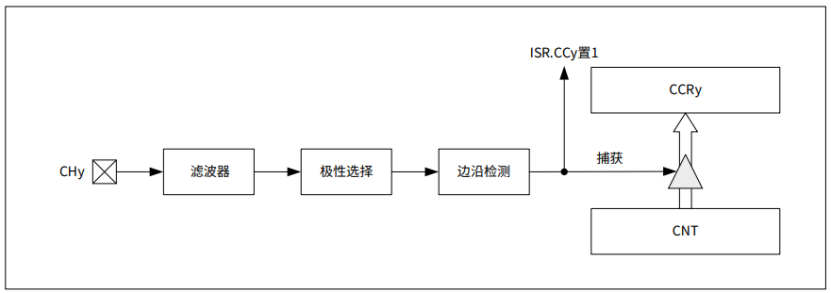
還需要做的工作就是(參考stm32參考手冊的TIM的結(jié)構(gòu)框圖):
TIM_SelectInputTrigger(TIM2,TIM_TS_TI1FP1); //參考TIM結(jié)構(gòu)圖選擇濾波后的TI1輸入作為觸發(fā)源,觸發(fā)下面程序的復(fù)位
TIM_SelectSlaveMode(TIM2,TIM_SlaveMode_Reset); //復(fù)位模式-選中的觸發(fā)輸入(TRGI)的上升沿初始化計數(shù)器,并且產(chǎn)生一個更新線號
TIM_SelectMasterSlaveMode(TIM2,TIM_MasterSlaveMode_Enable);
//主從模式選擇
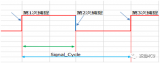
這樣我們就可以很輕松的就得到了連接在TIM2的通道1上的信號的頻率,但是3通道的頻率的值永遠都是跳動的不準(zhǔn),測試了半天也沒有找到根本原因,請看TIM的結(jié)構(gòu)框圖的一部分
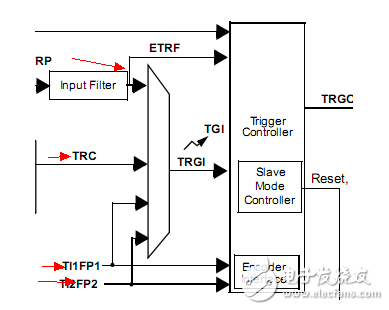
紅色箭頭所指,這才找到原因,觸發(fā)的信號源只有這四種,而通道3上的計數(shù)器的值不可能在接受到信號的上升沿時候,有復(fù)位這個動作,找到原因了。這就是3通道上的數(shù)據(jù)不停跳動的原因,要想得到信號的頻率也是有辦法的,可以取連續(xù)兩次捕捉的值之差,這個值就是信號的周期,自己根據(jù)實際情況去算頻率吧。
有以上可以得到:
stm32的TIM2的四個通道可以同時配置成輸入捕捉模式,但是計算CH3,CH4信號的頻率步驟有點繁瑣(取前后捕捉的差值),但是他的CH1,和CH2可以輕松得到:
通道1
TIM_SelectInputTrigger(TIM2,TIM_TS_TI1FP1); //參考TIM結(jié)構(gòu)圖選擇濾波后的TI1輸入作為觸發(fā)源,觸發(fā)下面程序的復(fù)位
TIM_SelectSlaveMode(TIM2,TIM_SlaveMode_Reset); //復(fù)位模式-選中的觸發(fā)輸入(TRGI)的上升沿初始化計數(shù)器,并且產(chǎn)生一個更新線號
TIMx-》CRR1的值即為信號的周期
通道2:
TIM_SelectInputTrigger(TIM2,TIM_TS_TI2FP2); //參考TIM結(jié)構(gòu)圖選擇濾波后的TI1輸入作為觸發(fā)源,觸發(fā)下面程序的復(fù)位
TIM_SelectSlaveMode(TIM2,TIM_SlaveMode_Reset); //復(fù)位模式-選中的觸發(fā)輸入(TRGI)的上升沿初始化計數(shù)器,并且產(chǎn)生一個更新線號
TIMx-》CRR2的值即為信號的周期
STM32的定時器外設(shè)功能強大得超出了想像力,STM32一共有8個都為16位的定時器。其中TIM6、TIM7是基本定時器;TIM2、TIM3、TIM4、TIM5是通用定時器;TIM1和TIM8是高級定時器。這些定時器使STM32具有定時、信號的頻率測量、信號的PWM測量、PWM輸出、三相6步電機控制及編碼器接口等功能,都是專門為工控領(lǐng)域量身訂做的。
基本定時器:具備最基本的定時功能,下面是它的結(jié)構(gòu):
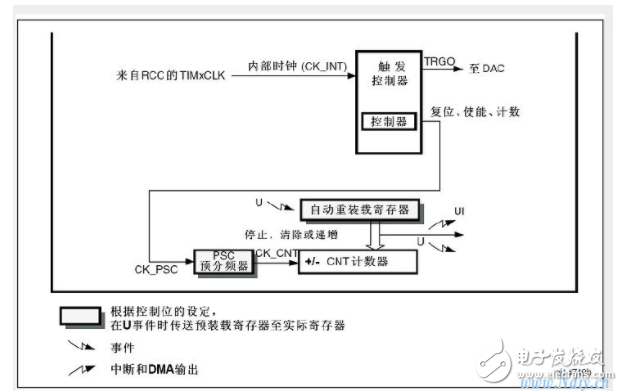
我們來看看它的啟動代碼:
void TIM2_Configuration(void)
{ 基本定時器TIM2的定時配置的結(jié)構(gòu)體(包含定時器配置的所有元素例如:TIM_Period= 計數(shù)值)
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
設(shè)置TIM2_CLK為72MHZ(即TIM2外設(shè)掛在APB1上,把它的時鐘打開。)
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2 ,ENABLE);
設(shè)置計數(shù)值位1000
TIM_TimeBaseStructure.TIM_Period=1000;
將TIM2_CLK為72MHZ除以72 = 1MHZ為定時器的計數(shù)頻率
TIM_TimeBaseStructure.TIM_Prescaler= 71;
這個TIM_ClockDivision是設(shè)置時鐘分割,這里不分割還是1MHZ的計數(shù)頻率
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;
設(shè)置為向上計數(shù)模式;(計數(shù)模式有向上,向下,中央對齊1,中央對齊2,中央對齊3)
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up;
將配置好的設(shè)置放進stm32f10x-tim.c的庫文件中
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseStructure);
清除標(biāo)志位
TIM_ClearFlag(TIM2,TIM_FLAG_Update);
使能TIM2中斷
TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE);
使能TIM2外設(shè)
TIM_Cmd(TIM2,ENABLE);
}
通用定時器:就比基本定時器復(fù)雜得多了。除了基本的定時,它主要用在測量輸入脈沖的頻率、脈沖寬與輸出PWM脈沖的場合,還具有編碼器的接口。
我們來詳細講解:如何生成PWM脈沖
通用定時器可以利用GPIO引腳進行脈沖輸出,在配置為比較輸出、PWM輸出功能時,捕獲/比較寄存器TIMx_CCR被用作比較功能,下面把它簡稱為比較寄存器。
這里直接舉例說明定時器的PWM輸出工作過程:若配置脈沖計數(shù)器TIMx_CNT為向上計數(shù),而重載寄存器TIMx_ARR(相當(dāng)于庫函數(shù)寫法的TIM_Period的值N)被配置為N,即TIMx_CNT的當(dāng)前計數(shù)值數(shù)值X在TIMxCLK時鐘源的驅(qū)動下不斷累加,當(dāng)TIMx_CNT的數(shù)值X大于N時,會重置TIMx_CNT數(shù)值為0重新計數(shù)。
而在TIMxCNT計數(shù)的同時,TIMxCNT的計數(shù)值X會與比較寄存器TIMx_CCR預(yù)先存儲了的數(shù)值A(chǔ)進行比較,當(dāng)脈沖計數(shù)器TIMx_CNT的數(shù)值X小于比較寄存器TIMx_CCR的值A(chǔ)時,輸出高電平(或低電平),相反地,當(dāng)脈沖計數(shù)器的數(shù)值X大于或等于比較寄存器的值A(chǔ)時,輸出低電平(或高電平)。
如此循環(huán),得到的輸出脈沖周期就為重載寄存器TIMx_ARR存儲的數(shù)值(N+1)乘以觸發(fā)脈沖的時鐘周期,其脈沖寬度則為比較寄存器TIMx_CCR的值A(chǔ)乘以觸發(fā)脈沖的時鐘周期,即輸出PWM的占空比為A/(N+1)。
如果不想看的可以直接看我標(biāo)注的紅色字體,就大體可以理解。
下面我們來編寫具體代碼和講解:
void TIM3_GPIO_Config(void)
{配置TIM3復(fù)用輸出PWM的IO
GPIO_InitTypeDefGPIO_InitStructure;
打開TIM3的時鐘
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
打開GPIOA和GPIOB的時鐘
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA| RCC_APB2Periph_GPIOB, ENABLE);
配置PA6.PA7的工作模式
GPIO_InitStructure.GPIO_Pin= GPIO_Pin_6 |GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode =GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed =GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
配置PB0.PB1的工作模式
GPIO_InitStructure.GPIO_Pin= GPIO_Pin_0 |GPIO_Pin_1;
GPIO_Init(GPIOB,&GPIO_InitStructure);
}
void TIM3_Mode_Config(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;//初始化TIM3的時間基數(shù)單位
TIM_OCInitTypeDef TIM_OCInitStructure;//初始化TIM3的外設(shè)
u16 CCR1_Val= 500;
u16 CCR2_Val= 375;
u16 CCR3_Val= 250;
u16 CCR4_Val= 125;//PWM信號電平跳變值(即計數(shù)到這個數(shù)值以后都是低電平之前都是高電平)
TIM3的時間基數(shù)單位設(shè)置(如計數(shù)終止值:999,從0開始;計數(shù)方式:向上計數(shù))
TIM_TimeBaseStructure.TIM_Period= 999;
TIM_TimeBaseStructure.TIM_Prescaler= 0;
TIM_TimeBaseStructure.TIM_ClockDivision= TIM_CKD_DIV1 ;
TIM_TimeBaseStructure.TIM_CounterMode= TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseStructure);
TIM3的外設(shè)的設(shè)置
TIM_OCInitStructure.TIM_OCMode= TIM_OCMode_PWM1; //TIM脈沖寬度調(diào)制模式1
TIM_OCInitStructure.TIM_OutputState= TIM_OutputState_Enable;//這個暫時不知道,stm32固件庫里沒有搜到。應(yīng)該是定時器輸出聲明使能的意思
TIM_OCInitStructure.TIM_Pulse =CCR1_Val;//設(shè)置了待裝入捕獲比較寄存器的脈沖值
TIM_OCInitStructure.TIM_OCPolarity= TIM_OCPolarity_High; //TIM輸出比較極性高
TIM_OC1Init(TIM3,&TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM3,TIM_OCPreload_Enable);//使能或者失能TIMx在CCR1上的預(yù)裝載寄存器
下面3路PWM輸出和上面的一樣不再解說
TIM_OCInitStructure.TIM_OutputState= TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse =CCR2_Val;
TIM_OC2Init(TIM3,&TIM_OCInitStructure);
TIM_OC2PreloadConfig(TIM3,TIM_OCPreload_Enable);
TIM_OCInitStructure.TIM_OutputState= TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse =CCR3_Val;
TIM_OC3Init(TIM3,&TIM_OCInitStructure);
TIM_OC3PreloadConfig(TIM3,TIM_OCPreload_Enable);
TIM_OCInitStructure.TIM_OutputState= TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse =CCR4_Val;
TIM_OC4Init(TIM3,&TIM_OCInitStructure);
TIM_OC4PreloadConfig(TIM3,TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM3,ENABLE); //使能TIM3重載寄存器ARR
TIM_Cmd(TIM3,ENABLE);//使能TIM3
}
下面是看看我們程序達到的4路PWM的效果:
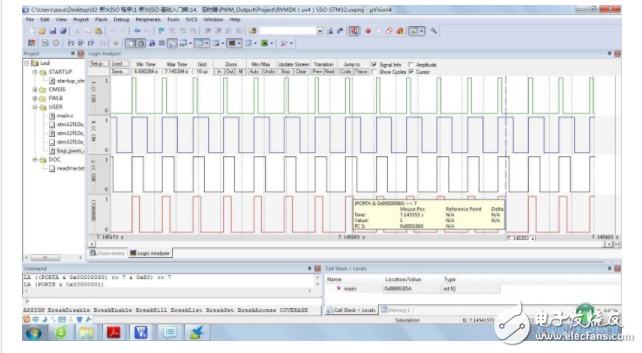
可以看到明顯占空比不同的4路pwm波。
這一節(jié)終于講完,個人覺得敲一遍代碼學(xué)起來還是蠻容易懂的。希望看到的人也能搞懂。
最后補充一點pwm具體能干什么? 特別是對廣大電子DIY愛好者的應(yīng)用:
智能小車的電機控制:我們可以利用pwm來控制我們的智能小車的車速;
機器人:給“機器人關(guān)節(jié)”舵機周期一定(我以前玩過具體多少毫秒忘記了)pwm波就可以控制舵機的轉(zhuǎn)動角度了;
呼吸燈:輸入不同的pwm波就可以達到明暗漸明漸暗的效果。
還有別的應(yīng)用大家一起發(fā)揮想象力給予補充。我們可以一起交流,希望大家支持。









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論