 電子發燒友App
電子發燒友App


本文介紹汽車自動巡航控制系統的結構組成和工作原理,選擇基于Atmega 8單片機的PID控制策略實現車輛的穩定行駛及加速、減速的控制過程。本系統能有效地減輕長途駕駛中駕駛員的工作強度,提高舒適性,并減少燃料消耗,利于環保。
據調查,10%的交通事故是由疲勞駕駛、操作不當引起的,本文介紹的汽車自動巡航控制系統可以有效地減輕駕駛員的疲勞,避免交通事故,并利于環保。當在高速公路上長時間行駛時,打開該系統的自動操縱開關后,巡航控制系統將根據行車阻力自動增減節氣門開度,避免駕駛員頻繁踩油門踏板就可使汽車行駛速度保持一定,大大地減輕了駕駛員的疲勞強度。由于巡航控制系統能自動地維持車速,避免了油門踏板不必要的人為變動,進而減少了汽車燃料的消耗和廢氣的排放。
1 汽車巡航控制系統的構成
汽車電子自動巡航控制系統主要由巡航控制開關、車速傳感器、電子控制單元(ECU)、汽車制動開關、執行器等組成。電子自動巡航控制系統的組成部分及各部分在汽車內的安裝如圖1所示。
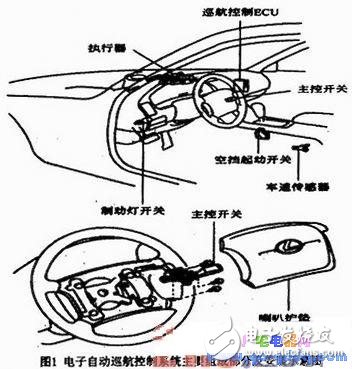
下面將具體介紹各部分結構原理及功能。
(1)巡航控制開關。當接通主開關后,若車速在巡航控制的范圍內(一般為40~200km/h)時,斷開“設定/滑行”開關,此時車速會存儲于RAM中,汽車維持此速度穩定行駛。當駕駛員希望巡航的車速提高時,接通“恢復/加速”開關,巡航控制ECU就會通過執行器使節氣門的開度增大,使汽車加速行駛,此時,存儲汽車實際車速參數的RAM存儲器處于動態刷新狀態,開關斷開瞬間時的車速存儲于存儲器,之后汽車將以此速度勻速行駛;當駕駛員希望穩定的車速降低時,接通“設定/滑行”開關,巡航控制ECU就會通過執行器使節氣門開度關小,汽車減速滑行,此時存儲汽車實際車速參數的RAM存儲器處于動態刷新狀態,開關斷開瞬間時的車速存儲于存儲器,之后汽車將以此速度勻速行駛。
(2)巡航控制ECU。用于接收各個傳感器送來的信號,再經計算、加工處理后,向執行器發出指令,控制執行器的動作。
(3)空檔啟動開關。用于控制是否使汽車立即退出巡航控制狀態。
(4)制動開關。安裝于制動踏板處,用于向巡航控制ECU傳送制動信號(即駕駛員踩下制動踏板的信號)以使汽車迅速退出巡航控制狀態。
(5)車速傳感器。車速傳感器采集實際實時車速信號,作為電子控制單元的輸入量。
2 巡航控制系統的工作原理
? ??圖2是一種典型的雙閉環汽車電子巡航控制系統原理框圖。由圖2可知,控制器的輸入是設定的固定車速信號與實際車速的反饋信號之差。ECU將這兩種信號進行比較,得出誤差信號,經放大、處理后成為節氣門控制信號,送至節氣門執行器,驅動節氣門執行器工作,調節發動機節氣門開度,以修正實際車速,從而將實際車速很快調整到駕駛員設定通常將汽車在平坦路面上行駛時車速與節氣門開度的關系存儲在巡航控制系統ECU的ROM中。巡航控制系統根據目標車速自動維持汽車恒速行駛。
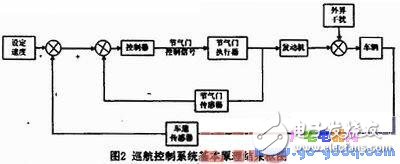
汽車在巡航定速狀態下,當汽車速度下降時,ECU加大節氣門開度,使發動機功率升高,轉矩增大,車速達到設定速度。反之,減小節氣門的開度。系統進行巡航控制時,若在平坦路面上車速為v,按下設定開關進入巡航控制的自動行駛狀態,一旦遇到爬坡時,則行駛阻力增加,如不進行調節控制,車速就會降低,此時巡航控制器會按照一定的控制規則使節氣門開度變大,使車速穩定在v,重新取得動力平衡。當遇到下坡時,行駛阻力減小,巡航控制系統調節節氣門的開度變小,使車速保持在v取得平衡。因此,即使行駛阻力發生變化,車速也只在很小范圍內變化,達到穩定行駛的目的。當車速超出特定上下限時,巡航系統不工作。這個上下限的范圍并不固定依車型的不同而略有差別。
當系統的傳感器出現故障,或控制信號電路被切斷時,傳感器輸出為零,此時車速超出特定上下限,巡航控制系統停止工作。
3 汽車巡航系統控制算法的選擇
PID控制作為最早發展起來的控制策略經由長時間的不斷發展和改進,具有結構簡單、魯棒性好、可靠性高、參數易于整定等優點。因此在工業控制中PID算法具有最廣泛的應用。本次設計選擇PID控制策略實現巡航系統的定速功能。
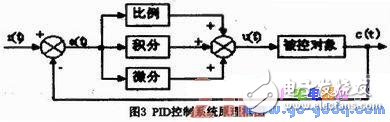
下面介紹PID控制器各校正環節的作用。
(1)比例環節。根據控制系統的偏差信號e(t),并按一定的比例產生控制作用,以減少誤差。
(2)積分環節。主要用于消除靜差,提高系統的無差度。積分作用的強弱取決于積分時問常數,積分時間常數越大,積分作用越弱,反之,則越強。
(3)微分環節。能反映偏差信號的變化趨勢(變化速率),并能在偏差信號值變得太大之前,在系統中引入一個有效的早期修正信號,從而加快系統的動作速度,減小調節時間。
在數字計算機控制系統中,使用數字PID控制器,數字PID控制算法又分為位置式PID控制算法和增量式PID控制算法。兩種控制算法相比較而言,當計算機只輸出增量時,增量式PID控制算法計算機誤動作造成輸出變化小,控制狀態的切換沖擊也小,算式中不作累加運算,增量只與最近的幾次采樣有關,控制效果明顯優于位置式PID控制算法。因此選擇增量式數字PID控制算法。
4 硬件設計概述
本文所介紹的汽車自動巡航系統輸入量:實際車速、節氣門開度、發動機轉速、制動開關(當制動開關有效時系統設定值是設定車速)。選用Atmega 8單片機作為控制核心,執行器采用直流電動機。控制過程如下:設定速度和實際車速輸入、比較產生偏差,通過PID算法整定,結合其他輸入量處理后的信號,由Atmega 8單片機PWM通道驅動直流電動機轉速而改變氣節門開度,實現車速的控制。
出于安全考慮,在硬件設計上將制動開關與節氣門執行器直接相連,這樣當踩下制動踏板時,在停止單片機恒速控制程序的同時,將巡航控制系統與節氣門拉索斷開。
系統硬件電路主要由微處理器、電源電路、離合器和直流電機驅動電路、保護電路、A/D轉換電路和輸入信號處理電路等部分組成。Atm ega 8微處理器是系統的核心。汽車巡航控制系統中多處用到傳感器進行信號采集,所需傳感器主要包括車速傳感器、節氣門位置傳感器、制動踏板傳感器、離合器踏板傳感器等。
車速傳感器采集的速度信號是車輛巡航控制系統最重要的輸入信息之一。車速傳感器將采集的車速模擬信號轉化為數字量輸送給巡航控制ECU,作為反饋信號與設定值比較處理后產生輸出信號,驅動執行器達到控制要求。對車速傳感器的要求是實時性、準確性、可靠性。
節氣門位置傳感器的功能是采集節氣門位置信號。在該系統中節氣門位置測量選用電位器式角位移傳感器,在傳感器和微處理器之間有A/D轉換電路,將傳感器輸出的電壓信號先轉換為數字量,再由微處理器進行處理。
制動踏板傳感器安裝在制動踏板下,用于獲取制動踏板動作信號,以決定是否退出巡航系統。
離合器踏板傳感器安裝在離合器踏板下,用于獲取離合器踏板動作信號。
5 系統軟件流程
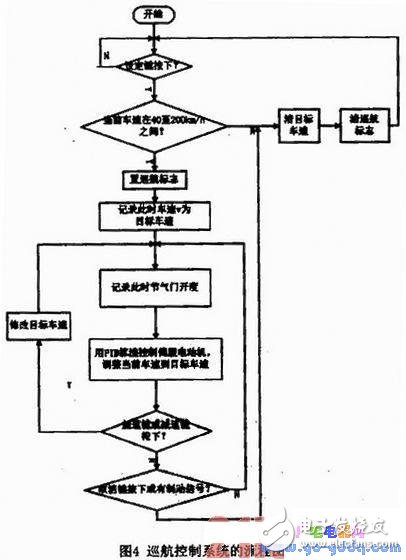
巡航控制過程如圖4所示。在汽車電子巡航控制系統中,實際車速信號反饋至電子控制器,并與設定車速進行比較,因而系統工作在閉環控制方式,采用的控射方法是增量式PID控制策略。通過對單片機編程調節直流電機的轉速和節氣門的開度,使車速在允許的誤差范圍內保持穩定。
為清晰闡述汽車自動巡航系統的軟件設計,下面從模塊化角度說明單片機軟件編程部分的組成,單片機編程涉及的模塊主要有初始化模塊、鍵盤掃描模塊、啟動判斷模塊、通訊模塊、中斷模塊、定時模塊、看門狗模塊等。
系統檢測是否有按鍵按下,當巡航開關接通時,啟動判斷程序判斷車速采集程序獲得的車速信號是否在可巡航的范圍內,此時設定鍵有效時,實際車速需維持在此時速度。定時程序塊實現定時,達到定時點時間時發生中斷,采集實際車速與設定值比較,若差值在誤差允許范圍內不動作,若不在,則進入電動機轉速控制的程序段實現車速整定。當檢測到加速或減速按鍵按下時,首先修改車速設定值,然后進入電機轉速控制的程序段實現加速或減速;當檢測到制動開關接通時退出巡航控制系統。
6 結論
本文將PID控制算法與Atmega 8單片機相結合,應用于汽車自動巡航控制系統的研究,有效地實現車輛在誤差允許范圍內的穩定行駛,可以減輕長時間駕駛旅途中駕駛員的勞動強度,進而減少交通事故的發生。









 工商網監
工商網監
評論