 電子發燒友App
電子發燒友App


? ? ? ?在實際工程中,應用最為廣泛的調節器控制規律為比例、積分、微分控制,簡稱PID控制,又稱PID調節。
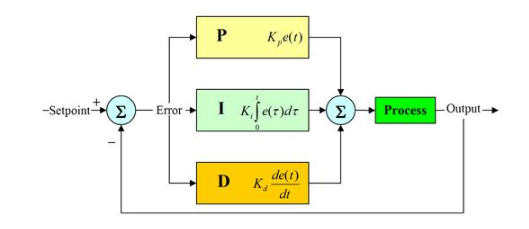
PID控制器問世至今以其結構簡單、穩定性好、工作可靠、調整方便而成為工業控制的主要技術之一。
當被控對象的結構和參數不能完全掌握,或得不到精確的數學模型時,控制理論的其它技術難以采用時,系統控制器的結構和參數必須依靠經驗和現場調試來確定,這時應用PID控制技術最為方便。即當我們不完全了解一個系統和被控對象,或不能通過有效的測量手段來獲得系統參數時,最適合用PID控制技術。
PID控制,實際中也有PI和PD控制。PID控制器就是根據系統的誤差,利用比例、 積分、微分計算出控制量進行控制的。PID控制器的參數整定是控制系統設計的核心內容!
如果你從來沒有接觸過PID,看完這篇文章你就會明白PID控制到底是怎么回事了!
1.假設我們面對的系統是一個簡單的水箱液位,要從空箱開始注水達到某個高度,而你能控制的變量就是注水籠頭的開關大小。這個簡單的數學模型就是:dx=u。
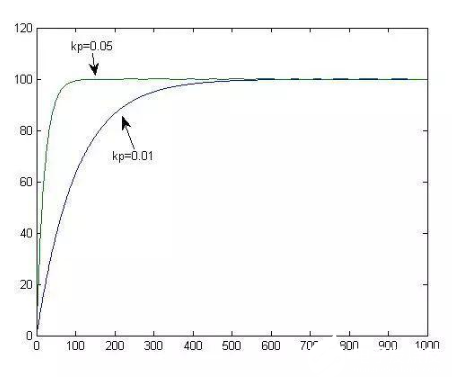
對于這個系統,我們只需要一個比例環節u=k pe就能將其控制住。
此時,kp的大小代表了水龍頭的粗細(即出水量大小對液位誤差的敏感程度,假設水龍頭開度與誤差正比關系),越粗調的越快,也就是所謂的“增大比例系數一般會加快系統響應”。如下圖:
2.假設這個水箱不僅僅是裝水的容器了,還需要持續穩定的給用戶供水。這個系統的數學模型就需要增加一項:dx=u-c,這里的c是個正的常數。
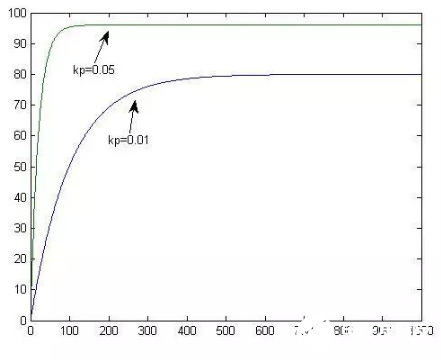
我們發現如果控制器只有一個比例環節,那么當系統穩定,也就是dx=0的時候,恰好e=c/kp,在系統穩定時不為0,液位離我們想要的高度總是差那么一點,這也就是所謂的穩態誤差,或者叫靜差。
這時候c是固定的,那么當然kp越大,e就越小。這也就是所謂的增大比例系數P在有靜差的情況下有利于減小靜差。如下圖:
3.從上面的公式e=c/kp可以看出,kp再大也不可能把e變成0。老是調不到預定位置老板是會罵人的,這可咋辦?
然后有人就想到,第二小節里頭水箱跟第一小節的相比,就多了一個漏水的窟窿。它漏多少我給它補多少,那不就成了第一小節里的簡單系統了么!靠誰補呢?積分環節這時候就派上用場了。
我們把之前的控制器變成比例環節+積分環節:
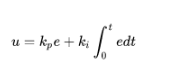
積分環節的意義就相當于你增加了一個水龍頭,這個水龍頭的開關規則是水位比預定高度低就一直往大了擰,比預定高度高就往小了擰。如果漏水速度不變,那么總有一天這個水龍頭出水的速度恰好跟漏水的速度相等了,系統就和第一小節一樣了。那時,靜差就沒有了。這就是所謂的積分環節可以消除系統靜差。
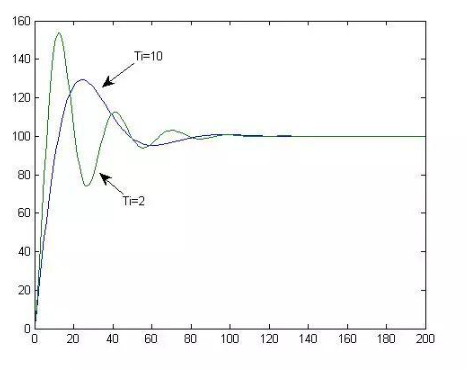
4.什么叫積分時間常數呢?一般PID控制里,表示積分環節敏感度的那個系數中,Ti就是積分時間常數。從這個式子我們可以看出,積分時間常數越大,積分環節系數就越小,積分環節就越不敏感(也就是第二個水龍頭越細)。
當只有一個比例環節的水龍頭注水的時候,是不會注水注多的,因為離得越近水龍頭關的越小。
但是當用兩個水龍頭注水的時候,在沒到預定高度前第二個積分環節的水龍頭可以一直往大了擰,當到達預定高度的時候它恰好擰到最大,自然而然就會注水注多了,而多出去的這部分水叫做“超調”。第二個水龍頭越粗,多注的水就會越多,它調到恰好等于漏水速度的時間就會越快,同時會多更多波折。
于是,老師告訴我們增大積分時間I有利于減小超調,減小振蕩,使系統的穩定性增加,但是系統靜差消除時間變長。如下圖:
5.接下來看點有意思的東西。還是上面這個系統,假如我們選用相同的積分時間常數,但是選擇不同的比例系數會如何呢?
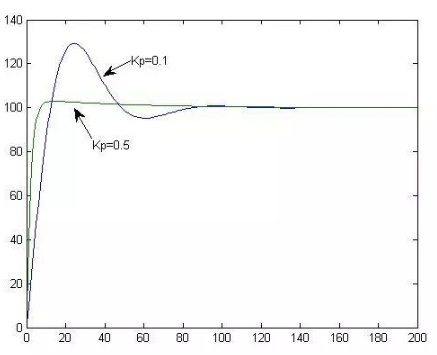
看到上面這幅圖,一些記性好的童鞋可能會有疑問。因為老師明明說過”過大的比例系數會使系統有比較大的超調,并產生振蕩,使穩定性變壞“,但是上面這幅圖里怎么比例大的反而超調小呢?
其實上面這幅圖很好解釋,小節4里我們說明了PI控制器超調出現原因是積分這個水龍頭在到達目標液位時也恰好開到了最大。而比例這個水龍頭越粗,那么它在超出目標液位時對超調的抑制也就越明顯。
這里,我想強調的是: PID參數整定的結論是根據普遍經驗總結的,但是針對某個具體的系統不一定完全適用。
6.在上面的系統中,我們假設用戶用水的固定的一個值,但是實際情況中用戶的用水量往往是變化的。假如我們的系統是dx=u-c(t)呢?
我們試著來分析一下:
我們的控制目標是讓x=xd,系統誤差的定義是:e=xd-x;
那么,誤差狀態方程就是:;
我們設定的控制目標是個常數,所以xd=0;
,從這個式子可以看出,當e=0時,不再變化,而c(t)是始終變化的。
此時de不恒為零,也就是說e不恒為零。
當c變成c(t)的時候,e=0就不再是系統的穩定平衡點了,經典意義上系統不再穩定。
7.這里加一個微分環節D變成PID控制會不會讓系統重新穩定呢?
當加入微分環節,
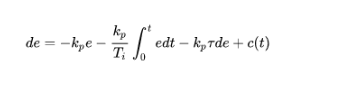
,那么,
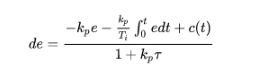
,對于任意,微分環節都讓de的變化減慢了。
這也就是“微分環節主要作用是在響應過程中抑制偏差向任何方向的變化”,“微分常數不能過大,否則會使響應過程提前制動,延長調節時間”。
至于“微分環節會提高系統抗擾動能力,降低系統抗噪聲能力”,更多指的是大多數細微測量噪聲造成的e很小,但瞬時的de較大,微分環節相對于PI環節更容易收到這些細微噪聲的影響。
但是,無論如何選取微分參數,PID控制都不能使系統穩定。
從這里,我們可以看到PID控制的局限。
希望大家不要死記口訣,多用所學到的控制理論來針對具體問題具體分析。











 工商網監
工商網監
評論