PID-PID控制器參數(shù)整定與實(shí)現(xiàn)
2020-05-12 11:30:36
PID基礎(chǔ)知識(shí)文章目錄PID基礎(chǔ)知識(shí)PID簡(jiǎn)介PID控制的原理和特點(diǎn)PID控制器的參數(shù)整定PID控制案例4.1 案例一4.2案例二P、PD、PI控制器5.1 P 比例控制5.2 PI 積分控制5.3
2021-07-01 10:01:17
PID控制的定義是什么?PID控制器參數(shù)整定的方法有哪些?
2021-09-28 08:00:16
各位大神有沒(méi)有知道PID控制器怎么安裝的啊?不勝感激。。。qq:976800156
2013-04-29 22:34:09
用數(shù)字電路搭一個(gè)PID控制器,簡(jiǎn)單說(shuō)一下大體思路即可,謝謝各位賜教!
2013-06-04 20:53:21
PID控制器原理PID控制器實(shí)際上是對(duì)偏差的控制,其原理圖如下:其數(shù)學(xué)的表達(dá)如下: u(x)=Kp(err(t)+1T.∫err(t)dt+TDderr(t)dt)u(x)=Kp(err(t
2021-09-07 09:01:48
PID是以它的三種糾正算法而命名的。這三種算法都是用加法調(diào)整被控制的數(shù)值。而實(shí)際上這些加法運(yùn)算大部分變成了減法運(yùn)算因?yàn)楸患訑?shù)總是負(fù)值。
2019-10-23 09:12:22
PID控制器是什么?PID的控制規(guī)律是什么?PID控制器各校正環(huán)節(jié)的作用有哪些?增量式PID和位置式PID特點(diǎn)是什么?
2021-07-13 07:16:36
工業(yè)生產(chǎn)過(guò)程中,對(duì)于生產(chǎn)裝置的溫度、壓力、流量、液位等工藝變量常常要求維持在一定的數(shù)值上,或按一定的規(guī)律變化,以滿(mǎn)足生產(chǎn)工藝的要求。PID控制器是根據(jù)PID控制原理對(duì)整個(gè)控制系統(tǒng)進(jìn)行偏差調(diào)節(jié),從而
2021-09-07 08:11:54
文章目錄PID控制器1. 控制器1.1 電機(jī)速度控制系統(tǒng)1.2 溫度或水位控制系統(tǒng)1.3 小小總結(jié)2. PID3. 模擬式PID4. 數(shù)字式PID4.1 位置式PID算法4.1.2 位置式pid算法
2021-09-07 07:39:57
。這個(gè)方法會(huì)引起擾動(dòng),所以基于模型的PID參數(shù)自整定在工業(yè)應(yīng)用不是太好。 如果自整定是基于控制律的,經(jīng)常難以把由負(fù)載干擾引起的影響和過(guò)程動(dòng)態(tài)特性變化引起的影響區(qū)分開(kāi)來(lái),因此受到干擾的影響控制器會(huì)產(chǎn)生
2008-09-10 13:00:51
目 錄一、序言二、PID控制器的設(shè)計(jì)1.PID控制原理圖2.PID控制器傳遞函數(shù)的一般表達(dá)式三、模糊控制器的設(shè)計(jì)1.模糊控制原理圖2.模糊控制器傳遞函數(shù)一般表達(dá)形式四、系統(tǒng)仿真五、總結(jié)
2022-02-23 07:14:28
Matlab 仿真——直流電機(jī)速度控制(3)PID控制器設(shè)計(jì)上一節(jié)我們知道了我們的開(kāi)環(huán)響應(yīng)并不能滿(mǎn)足設(shè)計(jì)需求,這一節(jié)我們通過(guò)一個(gè)PID控制器使我們的系統(tǒng)滿(mǎn)足設(shè)計(jì)需求。這里把設(shè)計(jì)需求和系統(tǒng)轉(zhuǎn)換方程粘貼在這里:設(shè)計(jì)需求(階躍響應(yīng)):穩(wěn)定時(shí)間
2021-11-15 07:16:52
PID控制器簡(jiǎn)介在過(guò)程控制中,按偏差的比例(P)、積分(I)和微分(D)進(jìn)行控制的PID控制器(亦稱(chēng)PID調(diào)節(jié)器)是應(yīng)用最為廣泛的一種自動(dòng)控制器。它具有原理簡(jiǎn)單,易于實(shí)現(xiàn),適用面廣,控制參數(shù)相互獨(dú)立
2021-09-07 08:06:08
PID參數(shù)的基本調(diào)試方法是什么?
2021-11-15 07:01:02
設(shè)計(jì)PID控制器時(shí),通過(guò)階躍響應(yīng)曲線法得到了被控對(duì)象的傳遞函數(shù)(為二階系統(tǒng)),請(qǐng)問(wèn)PID參數(shù)如何計(jì)算?看了很多資料,都是有工程整定的方法調(diào)試出來(lái)的,那么什么是理論計(jì)算法?有知道的可以指點(diǎn)一下不
2017-08-12 16:38:35
這些實(shí)數(shù)全部轉(zhuǎn)換成0.0-1.0之間的實(shí)數(shù),以便PID 指令功能塊接受,也就是說(shuō)把外界實(shí)際物理量轉(zhuǎn)換成PID 指令可以接收的數(shù)據(jù),即輸入/輸出的轉(zhuǎn)換與標(biāo)準(zhǔn)化處理。3. PID控制編程調(diào)試 在本套系統(tǒng)
2012-01-04 13:57:24
ST電機(jī)庫(kù)的PID控制器工作原理是什么?
2021-10-08 07:18:09
Simulink中的PID控制器調(diào)整
2018-07-31 14:20:25
FPGA中的數(shù)字控制器是什么?System Generator中的PID控制器是如何設(shè)計(jì)的?
2021-04-08 06:51:46
本帖最后由 夜魄Y 于 2020-3-24 07:41 編輯
如何將labview中的模糊控制器和pid結(jié)合在一起,利用模糊化后自動(dòng)調(diào)整pid的三個(gè)參數(shù)Kp、KI、Kd,希望有簡(jiǎn)單的例子可以用來(lái)探討。懂得人也可以互相討論哦。
2020-03-17 08:41:43
在進(jìn)行PID控制器工作之前,必須對(duì)其進(jìn)行調(diào)整以適應(yīng)要控制的過(guò)程的動(dòng)態(tài)。設(shè)計(jì)者給出P,I和D項(xiàng)的默認(rèn)值,這些值不能給出期望的性能,有時(shí)會(huì)導(dǎo)致不穩(wěn)定性和緩慢的控制性能。開(kāi)發(fā)了不同類(lèi)型的調(diào)節(jié)方法來(lái)調(diào)節(jié)
2020-09-01 17:58:40
PID 控制器運(yùn)行的數(shù)學(xué)函數(shù)。我們將展示函數(shù)的各個(gè)部分如何在實(shí)際設(shè)計(jì)中組合在一起。具體來(lái)說(shuō),我們將解決電路中接口元件的注意事項(xiàng),以完成用于位置控制的 PID 功能的那些部分,以及在將執(zhí)行控制的微控制器
2023-04-04 15:11:34
一種基于LabVIEW_的PID_控制器設(shè)計(jì)的方法
2013-04-21 19:26:42
所需的自動(dòng)控制系統(tǒng),進(jìn)行仿真及實(shí)際應(yīng)用。4、PID控制器設(shè)計(jì)的LabVIEW實(shí)現(xiàn)方法 PID控制器設(shè)計(jì)的主要任務(wù)是對(duì)于給定的被控對(duì)象,快速的確定比例系數(shù) 、積分系數(shù) 和微分系數(shù) ,使系統(tǒng)滿(mǎn)足相應(yīng)的指標(biāo)
2019-05-13 09:40:03
新人一枚,希望大家能發(fā)個(gè)關(guān)于 基于LabVIEW的步進(jìn)電機(jī)PID速度控制器 的文章,謝謝了!!!!
2015-04-20 20:34:47
通過(guò)Matlab/Simulink和Cadence PSpice聯(lián)合仿真驗(yàn)證了該新型控制方法具有很好的穩(wěn)定和瞬態(tài)響應(yīng)性能。 1雙閉環(huán)F-PID控制器的設(shè)計(jì)與實(shí)現(xiàn) 本文提出的控制方法直接以負(fù)載電流
2018-10-08 15:32:09
如何為BLDC電機(jī)構(gòu)建PID控制器?
2023-01-16 07:58:47
優(yōu)勢(shì) 。
BSP 版本:M480系列BSP CMSIS V3.03.000
硬件: NuMaker-ETM-M487 v1.1
此樣本演示了如何使用 DSP 庫(kù)中的 PID 控制器功能。 示例中有兩種方法
2023-08-31 07:58:32
模糊PID溫度控制系統(tǒng)的硬件電路包括哪幾部分呢?如何去設(shè)計(jì)一種基于STM32控制器的模糊PID溫度控制系統(tǒng)呢?
2021-12-23 07:08:20
這是通過(guò)控制烘箱的溫度來(lái)控制顆粒的濕度,即有兩個(gè)閉環(huán)結(jié)構(gòu)串聯(lián)而成,外環(huán)是濕度閉環(huán),內(nèi)環(huán)是溫度閉環(huán),前面濕度PID控制器的輸出信號(hào)是后面溫度控制器的設(shè)定值,串級(jí)控制如圖所示:現(xiàn)在,內(nèi)環(huán)已經(jīng)完成,即
2014-07-27 09:53:31
溫度是工業(yè)生產(chǎn)過(guò)程中一個(gè)主要的被控參數(shù)。目前,大多采用常規(guī)PID控制器實(shí)現(xiàn)對(duì)溫度的控制。
2019-11-04 06:01:42
關(guān)于本代碼的詳細(xì)講解及如何調(diào)節(jié)PID控制器
2021-08-31 07:45:42
快速浮_定點(diǎn)PID控制器FPGA的研究與實(shí)現(xiàn)提出了基于 的快速 控制器技術(shù),采用流水線運(yùn)算方法,具有高速 穩(wěn)定精確的實(shí)時(shí)控制性能,實(shí)現(xiàn)了速度和資源的優(yōu)化匹配研究并分析了位置式 不同算式的特點(diǎn),完成
2012-08-11 15:58:43
本文介紹VHDL-AMS的新概念和新特性。通過(guò)對(duì)PID控制原理進(jìn)行數(shù)學(xué)分析,建立PID控制器的數(shù)學(xué)模型,實(shí)現(xiàn)PID控制器的VHDL-AMS行為級(jí)建模,并進(jìn)行仿真分析。
2021-05-06 07:59:57
怎樣去調(diào)試永磁同步電機(jī)FOC矢量控制中電流環(huán)PI控制器的參數(shù)?如何對(duì)Iq,Id進(jìn)行PID控制器的參數(shù)整定?
2021-09-23 09:12:48
PID控制的原理是什么?怎樣去編寫(xiě)PID控制器和模糊控制器代碼呢?如何對(duì)PID控制器和模糊控制器進(jìn)行仿真呢?
2021-11-19 07:47:47
PID控制器是由哪些部分組成的?怎樣去設(shè)計(jì)一種PID控制器呢?
2021-10-11 07:34:58
怎樣去設(shè)計(jì)高速PID控制器?怎樣對(duì)高速PID控制器進(jìn)行仿真?
2021-04-28 06:43:09
、調(diào)整方便而成為工業(yè)控制主要技術(shù)之一。當(dāng)被控對(duì)象結(jié)構(gòu)和參數(shù)不能完全掌握,或不到精確數(shù)學(xué)模型時(shí),控制理論其它技術(shù)難以采用時(shí),系統(tǒng)控制器結(jié)構(gòu)和參數(shù)必須依靠經(jīng)驗(yàn)和現(xiàn)場(chǎng)調(diào)試來(lái)確定,這時(shí)應(yīng)用PID控制技術(shù)最為方便
2016-01-14 14:12:32
如何去設(shè)計(jì)模糊PID自整定控制器?關(guān)于模糊控制器算法的研究是什么?模糊PID控制器具有哪些特點(diǎn)?
2021-04-21 06:08:28
跪求!!求基于LabVIEW步進(jìn)電機(jī)PID速度控制器的設(shè)計(jì)
2015-04-21 15:52:00
50,PID調(diào)節(jié)程序如下圖所示:后面板程序如下圖所示:源程序下載:labview PID控制.zip論文:一種基于LabVIEW的PID控制器設(shè)計(jì)的方法.pdf
2019-04-23 09:40:04
和離散時(shí)間有關(guān)。因此需要重新計(jì)算系數(shù)。方法一、用公式替代s算子用Trapezoid(Tustin)方法離散化PID控制器。另外更多的傳遞函數(shù)離散化方法請(qǐng)瀏覽:
2021-08-23 07:07:20
PID控制器參數(shù)的優(yōu)化整定一直是自動(dòng)控制領(lǐng)域的研究熱點(diǎn)。提出一種利用改進(jìn)思維進(jìn)化計(jì)算(MEC)優(yōu)化PID控制器參數(shù)的方法,在原有算法的框架上,加入自調(diào)整操作,依據(jù)進(jìn)化方向
2009-03-15 02:39:51 31
31 文中將PID控制器在工程整定方法的基礎(chǔ)上,對(duì) PID參數(shù)作歸一化處理,然后通過(guò)模糊控制規(guī)則和模糊推理確定對(duì)PID 的參數(shù)進(jìn)行調(diào)節(jié),提出了一種新型的模糊PID 算法。從而使 PID 控制器
2009-04-10 10:47:2227 利用LabVIEW 虛擬儀器開(kāi)發(fā)平臺(tái),設(shè)計(jì)了一個(gè)程序,可以對(duì)3階以?xún)?nèi)的線性被控對(duì)象快速的確定PID 控制器的各個(gè)參數(shù),完成PID 控制器的設(shè)計(jì)。同時(shí),可以給出控制系統(tǒng)開(kāi)環(huán)或者閉環(huán)
2009-05-25 11:26:17119 針對(duì)工業(yè)過(guò)程中再熱汽溫等一類(lèi)大遲延慣性時(shí)變對(duì)象,采用模糊自整定PID 控制器對(duì)PID 參數(shù)調(diào)節(jié)和優(yōu)化,該方法將模糊技術(shù)與PID 控制綜合起來(lái),實(shí)現(xiàn)了PID 控制的智能化。仿真
2009-06-11 09:20:3530 本文針對(duì)傳統(tǒng)PID 控制器在冷卻機(jī)應(yīng)用中存在的問(wèn)題,提出了一種自適應(yīng)PID 控制器實(shí)現(xiàn)冷卻機(jī)熟料料層的自動(dòng)控制。在給出冷卻機(jī)高溫熟料料層厚度的測(cè)量方法之后,提出了模糊控制
2009-07-30 11:09:1411 針對(duì)一般BP 算法存在的不足,提出一種改進(jìn)的BP 算法,并將其應(yīng)用于PID 控制器的參數(shù)設(shè)計(jì)中,并且克服了常規(guī)的PID 控制器參數(shù)整定的費(fèi)時(shí)性,用MBP 算法的PID 控制器代替常規(guī)的PID 調(diào)
2009-08-07 09:42:2318 針對(duì)傳統(tǒng)的多通道數(shù)字PID 控制器實(shí)時(shí)性較差的特點(diǎn),本文提出一種利用FPGA 技術(shù)實(shí)現(xiàn)多通道PID 控制器的硬件設(shè)計(jì)方案。并且采用模糊自整定方法對(duì)PID 控制器參數(shù)進(jìn)行實(shí)時(shí)調(diào)節(jié)
2009-09-15 15:32:5014 PID 控制器的穩(wěn)定范圍參數(shù)值:在工業(yè)控制上,大部分的控制器都是使用PID 控制器,而適當(dāng)?shù)恼{(diào)整PID 控制器參數(shù)遂便成極具挑戰(zhàn)的工作,但是有哪些范圍的PID數(shù)值可以使受控場(chǎng)(Plant)穩(wěn)
2009-10-31 14:31:4945 針對(duì)二自由度PID 控制器參數(shù)整定困難的問(wèn)題,提出了一種基于單親遺傳算法的二自由度參數(shù)整定方法。運(yùn)用該算法分別對(duì)單自由度PID 控制器和二自由度控制器進(jìn)行了整定,并與
2009-12-26 13:56:4223 隨著電力系統(tǒng)的發(fā)展,常規(guī)PID 勵(lì)磁控制器已經(jīng)不能滿(mǎn)足系統(tǒng)運(yùn)行的動(dòng)態(tài)和靜態(tài)性能要求,為了克服這一缺點(diǎn),設(shè)計(jì)了一種新型模糊PID 控制器,在常規(guī)模糊PID 勵(lì)磁控制器基礎(chǔ)之上,
2010-01-18 14:46:2023 文中將PID 控制器在工程整定方法的基礎(chǔ)上,對(duì)PID 參數(shù)作歸一化處理,然后通過(guò)模糊控制規(guī)則和模糊推理確定對(duì)PID 的參數(shù)進(jìn)行調(diào)節(jié),提出了一種新型的模糊PID 算法。從而使PID 控
2010-07-01 16:34:1558 針對(duì)傳統(tǒng)的多通道數(shù)字PID控制器實(shí)時(shí)性較差的特點(diǎn),本文提出一種利用FPGA技術(shù)實(shí)現(xiàn)多通道PID控制器的硬件設(shè)計(jì)方案。并且采用模糊自整定方法對(duì)PID控制器參數(shù)進(jìn)行實(shí)時(shí)調(diào)節(jié),實(shí)現(xiàn)PID
2010-07-20 15:43:2718 PID控制器 神經(jīng)網(wǎng)絡(luò)
2010-08-18 16:26:1035 什么是pid控制器
所謂PID控制,就是在一個(gè)閉環(huán)控制系統(tǒng)中,使被控物理量能夠迅速而準(zhǔn)確地?zé)o限接近于控制目標(biāo)的一種手段。 PID 控制功能是變頻器
2008-09-10 12:39:27 16096
16096 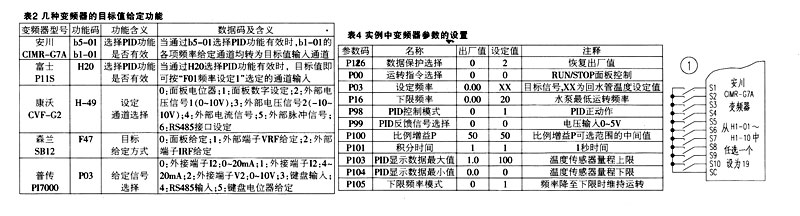
pid控制器原理
在工程實(shí)際中,應(yīng)用最為廣泛的調(diào)節(jié)器控制規(guī)律為比例積分微分控制,簡(jiǎn)稱(chēng)PID控制,又稱(chēng)PID調(diào)節(jié)。PID控制器問(wèn)世至
2008-09-10 12:44:5813218 
PID控制器參數(shù)整定方法及其應(yīng)用研究-2005。
2016-03-31 17:05:5620 PID控制器的穩(wěn)定範(fàn)圍參數(shù)值,有需要的下來(lái)看看。
2016-03-31 17:34:1612 PID控制器及其智能化方法探討-1999
2016-03-31 17:46:3313 PID控制器設(shè)計(jì)與參數(shù)整定方法綜述-2005
2016-03-31 17:46:3325 歸一化自整定PID控制器的擴(kuò)展設(shè)計(jì)與應(yīng)用
2016-03-31 17:46:338 基于MATLAB的PID控制器設(shè)計(jì),有需要的下來(lái)看看
2016-03-31 17:46:3347 鼠籠電機(jī)模糊PID控制器的設(shè)計(jì)-2009。
2016-04-06 11:49:058 PID控制原理及編程方法
2016-11-17 11:43:165 PID控制最通俗的解釋與PID參數(shù)的整定方法
2017-01-04 14:47:1540 基于模糊PID控制器的控制方法研究_王述彥
2017-02-08 01:58:380 基于PID控制原理及編程方法
2017-10-15 09:32:4122 隨著分?jǐn)?shù)階理論研究的不斷發(fā)展,分?jǐn)?shù)階控制器方法不僅可以改善系統(tǒng)動(dòng)態(tài)響應(yīng)特性,而且可以獲得優(yōu)越于傳統(tǒng)PID控制器方法,分?jǐn)?shù)階微積分控制器增加了積分階次和微分階次,提高了設(shè)計(jì)控制器的靈活度。本文在分?jǐn)?shù)
2017-11-09 17:26:2120 PID 控制作為一種經(jīng)典控制算法,具有結(jié)構(gòu)簡(jiǎn)單、易于調(diào)試、動(dòng)態(tài)響應(yīng)特性快、魯棒性強(qiáng)等特點(diǎn)。但是,對(duì)于中、低頻周期信號(hào),該算法仍無(wú)法實(shí)現(xiàn)無(wú)靜差控制;對(duì)由非線性負(fù)載引起的輸出波形畸變的調(diào)節(jié)能力也較差
2017-11-14 14:31:1620 PID控制器(比例-積分-微分控制器)是一個(gè)在工業(yè)控制應(yīng)用中常見(jiàn)的反饋回路部件,由比例單元比例P(proportion)、積分單元I(integration)和微分單元
2017-11-15 11:36:5772 PID 算法 在過(guò)程控制中,PID 控制器,一直是應(yīng)用最為廣泛的一種自動(dòng)控制器;PID控制也一直是眾多控制方法中應(yīng)用最為普遍的控制算法,PID 算法的計(jì)算過(guò)程與輸出值(OUT)有著直接函數(shù)關(guān)系,因此
2017-11-21 17:03:0428 本文首先介紹的是PID控制器的工作原理,其次介紹的是pid控制器的輸入輸出,最后介紹了PID控制器的參數(shù)整定以及PID控制器的控制實(shí)現(xiàn),具體的跟隨小編一起來(lái)了解一下。
2018-06-01 09:09:0125658 本文檔的主要內(nèi)容介紹的是PID控制器控制電壓的詳細(xì)介紹和PID控制器的C程序的概述
2018-06-07 08:00:0070 基于數(shù)字信號(hào)處理器(DSP)TMS320I F 2407和外接D/A轉(zhuǎn)換芯片,實(shí)現(xiàn)數(shù)字PID控制器,采用的PID控制算法是增量式PID控制算法,包括其硬件結(jié)構(gòu)和軟件設(shè)計(jì)。對(duì)PID控制算法及如何用
2019-01-02 16:30:0331 PID控制器廣泛應(yīng)用于工業(yè)過(guò)程控制。工業(yè)自動(dòng)化領(lǐng)域的大約95%的閉環(huán)操作使用PID控制器。控制器以這樣一種方式組合,即產(chǎn)生一個(gè)控制信號(hào)。作為反饋控制器,它將控制輸出提供到所需的水平。在微處理器發(fā)明之前,模擬電子元件實(shí)現(xiàn)了PID控制。但是今天所有的PID控制器都是由微處理器處理的。
2019-07-18 15:10:2010406 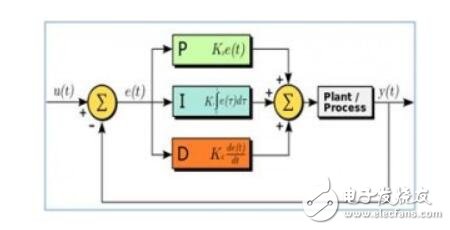
本文主要介紹了PID控制器的優(yōu)缺點(diǎn)及作用。PID控制適應(yīng)性好,有較強(qiáng)的魯棒性,對(duì)各種工業(yè)場(chǎng)合,都可在不同的程度上應(yīng)用。特別適于“一階慣性環(huán)節(jié)+純滯后”和“二階慣性環(huán)節(jié)+純滯后”的過(guò)程控制對(duì)象。
2019-07-18 15:17:1946602 狀態(tài)作為參考,設(shè)計(jì)PID控制器。進(jìn)而應(yīng)用Matlab/Simulink仿真軟件,構(gòu)建汽車(chē)橫擺角速度PID控制的虛擬仿真平臺(tái),實(shí)現(xiàn)汽車(chē)橫擺角速度PID控制器的虛擬仿真調(diào)試。
2019-10-11 16:06:0015 PID控制作為一種經(jīng)典的控制方法而廣泛應(yīng)用于工業(yè)控制中,是實(shí)際工業(yè)生產(chǎn)過(guò)程正常運(yùn)行的基本保障。隨著計(jì)算機(jī)技術(shù)的飛躍發(fā)展和人工智能技術(shù)滲透到自動(dòng)控制領(lǐng)域,出現(xiàn)了多種PID控制器的參數(shù)整定方法。本文
2019-12-04 08:00:0014 PID控制器的參數(shù)整定是控制系統(tǒng)設(shè)計(jì)的核心內(nèi)容。它是根據(jù)被控過(guò)程的特性確定PID控制器的比例系數(shù)、積分時(shí)間和微分時(shí)間的大小。
2020-06-18 09:41:007865 PID控制器為配合自動(dòng)控制系統(tǒng)的工作,單回路PID控制器設(shè)有手動(dòng)MAN、自動(dòng)AUTO和跟蹤TR工作方式,外給定控制器設(shè)有手動(dòng)MAN、自動(dòng)AUTO、串級(jí)CAS和跟蹤TR四種工作方式,并配有相應(yīng)工作方式按鍵,可以在不同方式之間進(jìn)行無(wú)擾切換。 手動(dòng)方式下,PID單元停止運(yùn)算。
2020-06-18 09:46:234306 如果調(diào)試人員熟悉被控對(duì)象,或者有類(lèi)似的控制系統(tǒng)的資料可供參考,PID控制器的初始參數(shù)是比較容易確定的。反之,控制器的初始參數(shù)的確定是相當(dāng)困難的,隨意確定的初始參數(shù)可能比最后調(diào)試好的參數(shù)相差數(shù)十倍甚至數(shù)百倍。很多書(shū)籍介紹了確定PID控制器初始參數(shù)的擴(kuò)充臨界比例度法和擴(kuò)充響應(yīng)曲線法。
2020-07-21 10:24:434832 它主要依賴(lài)工程經(jīng)驗(yàn),直接在控制系統(tǒng)的試驗(yàn)中進(jìn)行,且方法簡(jiǎn)單、易于掌握,在工程實(shí)際中被廣泛采用。PID控制器參數(shù)的工程整定方法,主要有臨界比例法、反應(yīng)曲線法和衰減法。
2021-02-09 17:22:002380 基于模糊PID控制器的VRV空調(diào)系統(tǒng)設(shè)計(jì)方法
2021-07-01 16:08:323 PID算法原理、調(diào)試方法及源代碼
2021-07-06 10:25:0411 的主要技術(shù)之一。當(dāng)被控對(duì)象的結(jié)構(gòu)和參數(shù)不能完全掌握,或得不到精確的數(shù)學(xué)模型時(shí),控制理論的 其它技術(shù)難以采用時(shí),系統(tǒng)控制器的結(jié)構(gòu)和參數(shù)必須依靠經(jīng)驗(yàn)和現(xiàn)場(chǎng)調(diào)試來(lái)確定,這時(shí)應(yīng)用PID控制技術(shù)最為方便。即當(dāng)我
2022-07-10 16:55:244118 PID控制器的含義 PID 控制器是一種線性控制器,它根據(jù)給定值與實(shí)際輸出值構(gòu)成控制偏差。將偏差的比例§、積分(I)和微分(D)通過(guò)線性組合構(gòu)成控制量,對(duì)被控對(duì)象進(jìn)行控制,故稱(chēng) PID 控制器
2023-03-09 14:22:072302 Moku:GoPID控制器實(shí)驗(yàn)采用齊格勒-尼克爾斯方法進(jìn)行PID調(diào)整并開(kāi)展實(shí)驗(yàn)視頻演示Moku:Go將8種實(shí)驗(yàn)儀器整合為一臺(tái)高性能設(shè)備。這份應(yīng)用說(shuō)明將利用Moku:Go的PID控制器、示波器、波形
2022-03-17 09:35:15471 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論